Изобретение относится к медицинской технике, а именно к протезам нижних конечностей.
Целью изобретения является уменьшение асимметрии походки и энергозатрат инвалида.
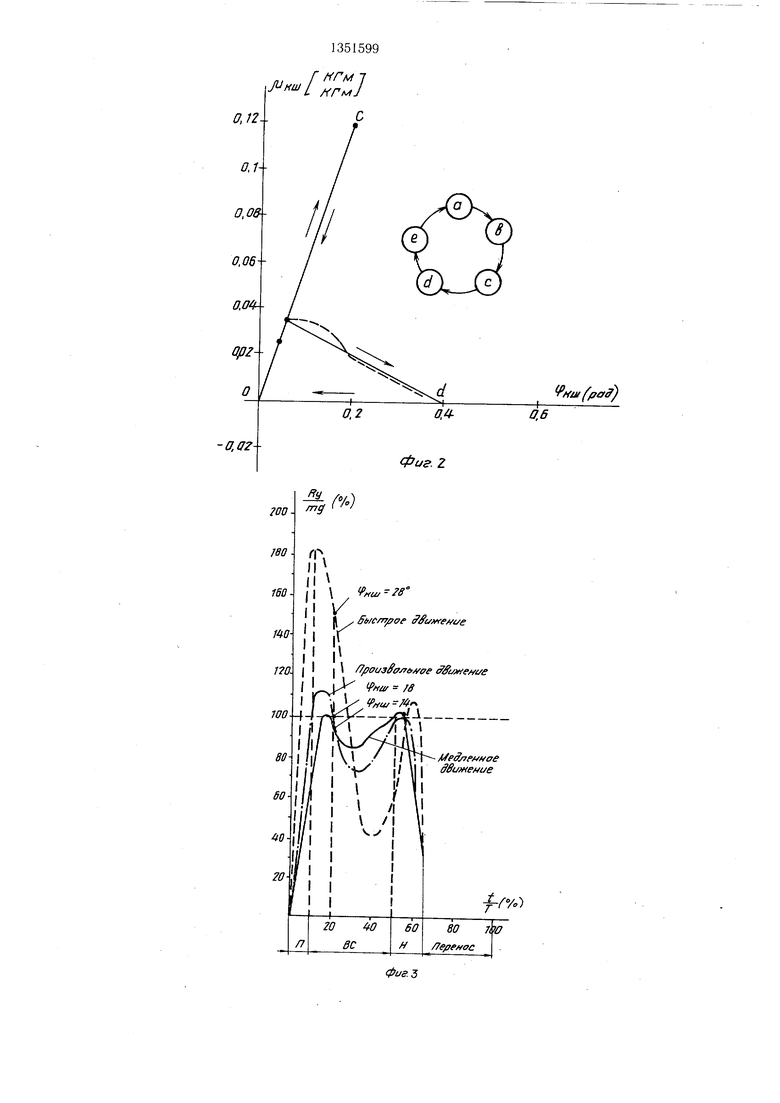
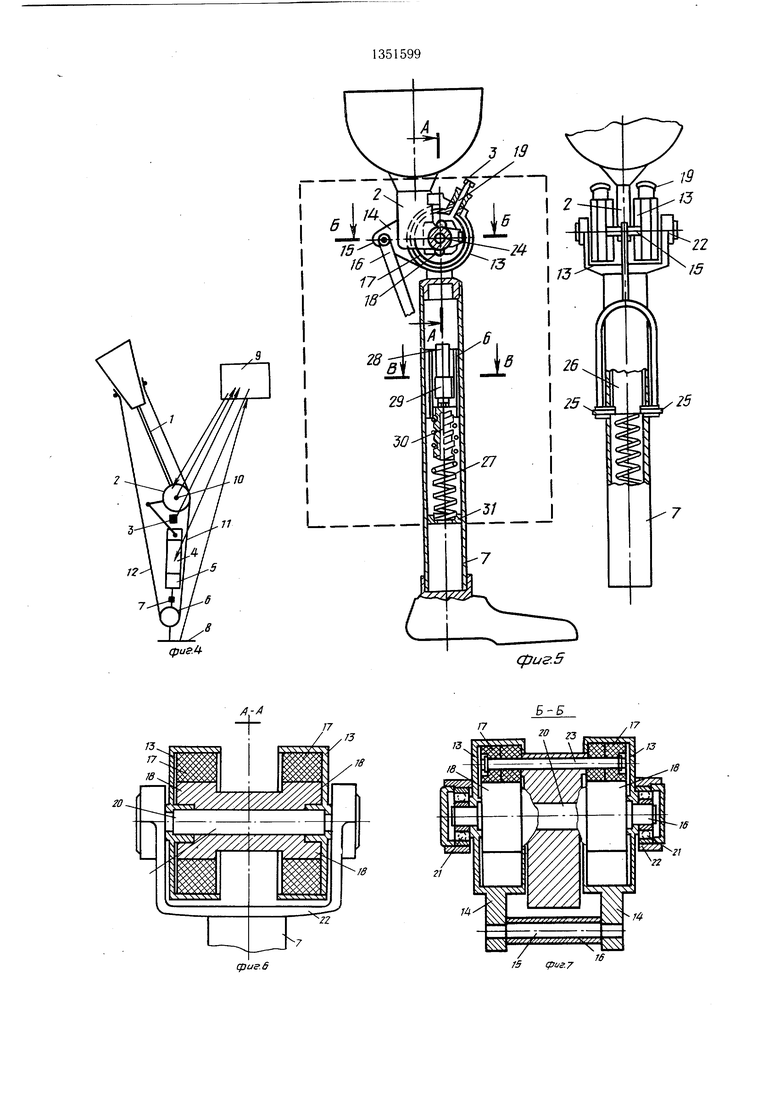
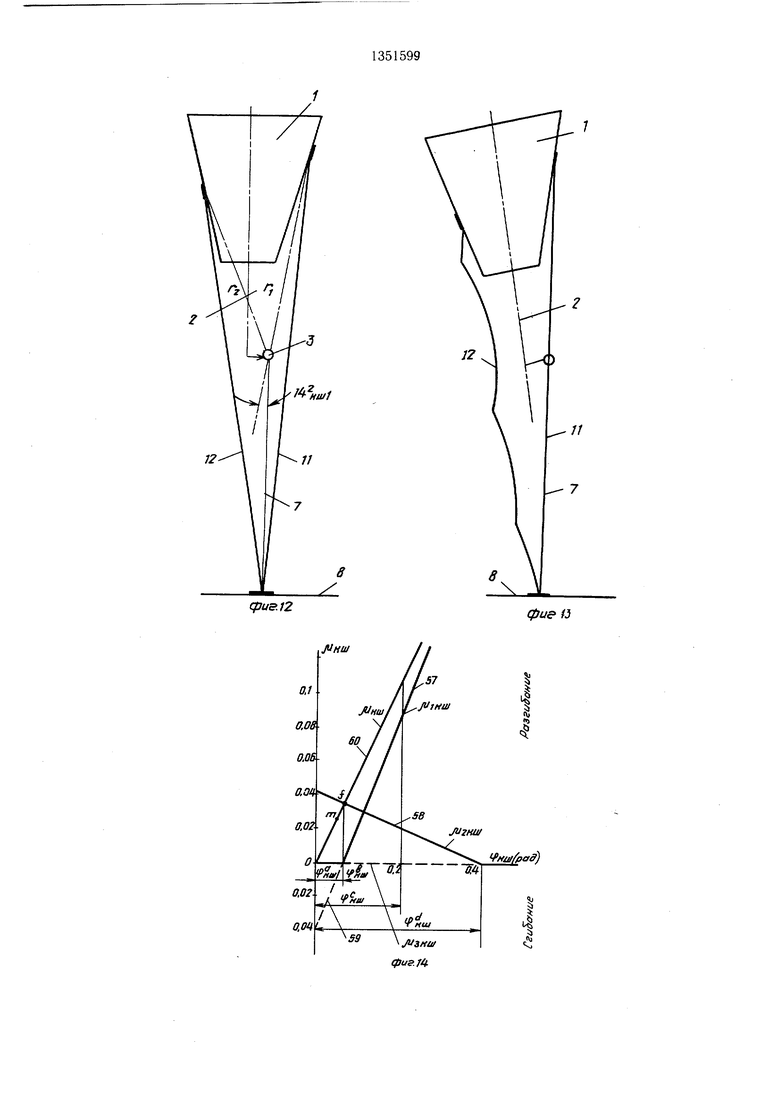
На фиг. 1 приведены типовые диаграммы изменения углов в коленном суставе во времени; fta фиг. 2 - зависимости приведенного момента в коленном шарнире от угла в этом же шарнире и последовательность характерных точек во времени; на фиг. 3 - графики реакций опор при движении в зависимости от темпа движения и максимальные величины углов подгибания для соответствуюш,их темпов; на фиг. 4 - конструктивная схема протеза бедра; на фиг. 5 - конструкция коленного шарнира с запираюшим устройством и рекуператором энергии (датчики угла и силы не показаны); на фиг. 6 - сечение А-А на фиг. 5; на фиг. 7 - сечение Б-Б на фиг. 5; на фиг. 8 - сечение В-В на фиг. 5; на фиг. 9 - функциональная схема системы управления протезом; на фиг. 10 - функциональная схема блока определения темпа движения; на фиг. 11 - функциональная схема блока управления двигателем; на фиг. 12 - работа тянок при фкш 0; на фиг. 13 - то же, при фкш (pJuj; на фиг. 14 - графики, иллюстрирующие формирование необходимых приведенных моментов в коленном шарнире протеза в процессе движения; на фиг. 15 - схема постоянного запоминающего устройства.
На фиг. 1 обозначено:
фкш - угол в коленном шарнире;
Мк1 - приведенный .момент в коленном
шарнире;
t - текущее время;
Т - период двойного шага.
Согласно фиг. 2
MKUI Мкш((ркш)
Для опорных участков движения а-с, b-d зависимости Мкш(фкш) практически совпадают с прямыми линиями, т.е.
а-с
Мкш К1фкш;
Мки, Мкш - К2(фкш-фкш),
где К|, Ка - коэффициенты, характеризующие жесткость коленного сустава.
В протезе реализация этих прямых обеспечивается на участке а-с рекуператором энергии, а на участке b-d - тормозным устройством в сочетании с упругими элементами тянок голеностопного устройства. Управление коленным шарниром основано на анализе соответствия возникающих в коленном шарнире моментов и углов моментам и углам в коленном суставе инвалида на протезе голени.
Из графиков (фиг. 3) следует наличие соответствия между углами и реакциями
опор. Таким образом,, добиваясь соответствия между углами в коленном шарнире и реакциями опоры путем подстройки жесткости пружины рекуператора, производят
подстройку протеза под темп движения.
Протез бедра (фиг. 4) состоит из куль- теприемника 1, гильзы 2 бедра, одноосного коленного шарнира 3 с узлом сцепления, датчика 4 силы, рекуператора 5 с автома,, тической регулировкой уровня накапливаемой энергии, голеностопного шарнира 6, гильзы 7 голени, стопы 8 протеза с тактильными датчиками, блока 9 управления протезом, связанного с устройством запирания коленного шарнира 3, тактильными датчи5 ками, рекуператором 5 и датчиком 10 угла и силы 4 реакции, передней 11 и задней 12 тянок, которые представляют собой плоскую резиновую ленту, тросики с пружинами и т.д.
Коленный шарнир 3 (фиг. 5) содер0 жит барабаны 13 сцепления с кривошипами 14, выполненными заодно с барабанами 13 сцепления, палец 15, соединяющий кривошипы 14 с шатуном 16, колодки 17 сцепления, разжимные кулачки 18, жестко
5 связанные с гильзой бедра 2; два управляющих электромагнита 19. Элементы коленного шарнира собраны на оси 20 (фиг. 6), установленной в подшипниках 21 (фиг. 7), внешняя обойма которых запрессована в приливах скобы 22, вворачиваемой на резь0 бе в гильзу 7 голени. Гильза 2 бедра и связанные с ней кулачки 18 свободно вращаются на оси 20. Начальная ориентация колодок 17 сцепления относительно разжимных кулачков 18, необходимая для нормальной работы коленного шарнира, обес5 печивается при помощи пальца 23 (фиг. 8), помещенного в фигурный паз консоли 24 (фиг. 5) гильзы 2 бедра; для предотвращения самопроизвольного сцепления колодки 17 сведены стягивающими пружинами
(не показаны). 0
Рекуператор 5 состоит из щатуна 16,
соединяющего через палец 15 и цапфы 25 кривощипы 14 с нажимным стаканом 26, рекуператора 5; пружины 27, выполняющей роль аккумулятора энергии; электродвига5 теля 28 с редуктором 29, выходной вал которого связан с регулировочным шнеком 30. Нижний конец пружины 27 касается уступа 31 гильзы 7 голени. Верхний конец пружины 27 упирается в профилированную выемку нажимного стакана 26. Нажимной
0 стакан 26 может свободно перемещаться в гильзе 7 голени вдоль ее оси, при этом цапфы 25 могут перемещаться в продольных- пазах гильзы 7 голени. Электродвигатель 28 вместе с редуктором 29 имеют возможность по мере вворачивания регулировочного шнека 30 в пружину 27 свободно перемещаться в направляющих 32 (фиг. 8) нажимного стакана 26. Шаг нарезки щнека 30 соответствует шагу
навивки пружины 27. При перемещении шнека внутри пружины 27 происходит замыкание части ее витков, что изменяет ее жесткость.
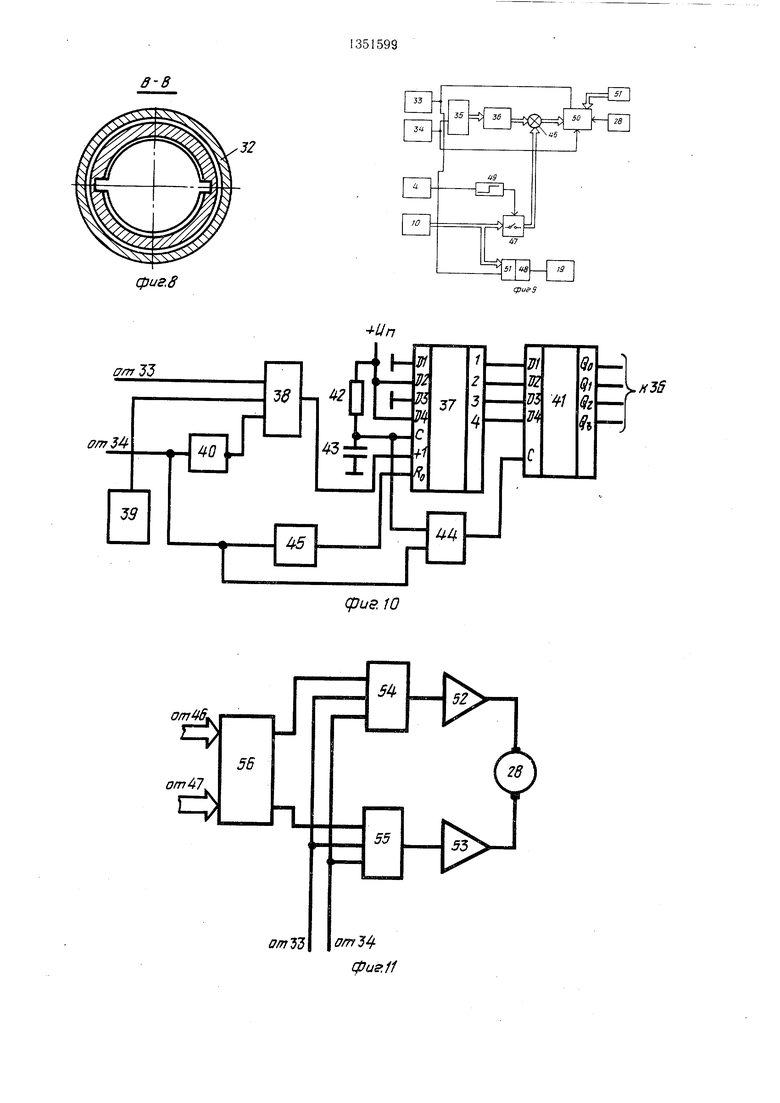
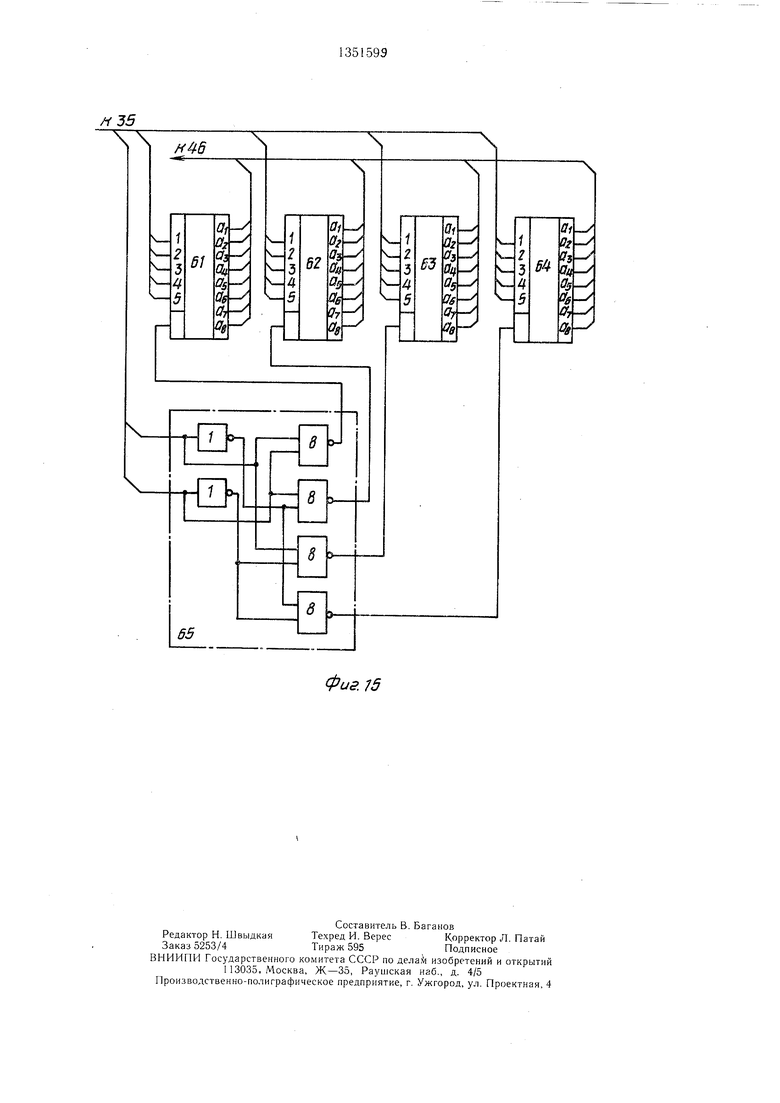
Система управления (фиг. 9) включает тактильные датчики 33 и 34, расположенные в стопе 8, которые представляют собой например, концевые выключатели, срабатывающие при нагрузке на передний и задний отделы стопы; блок 35 определения темпа движения по срабатыванию тактильных датчиков 33 и -34; постоянное запоминающее устройство 36 (ПЗУ), в котором хранятся углы сркш, которые должны иметь место в коленном щарнире 3 при данном темпе движения. ПЗУ 36 может быть выполнено на известных микросхемах, например К 55РЕЗ. Примерная схема такого ПЗУ, реализованного на м.икросхемах К155РЕЗ, приведена на фиг. 15. Необходимые углы фкш выбираются по информации, поступающей на адресные входы ПЗУ 36 от блока 35.
Блок 35 определения темпа движения содержит счетчик 37 (фиг. 10), выполненный, например, на микросхемах К155ИЕ7. Счетный вход счетчика 37 соединен с выходом схемы ЗИ 38. Один вход схемы ЗИ соединен с тактильным датчиком 33, другой - с генератором 39, а третий через инвертор 40 - с тактильным датчиком 34. Выходы счетчика 37 соединены с информационными входами регистра 41, выполненного, например, на микросхемах К155ИР1. Выходы регистра 41 являются выходами блока 35 и соединены с адресными входами ПЗУ 36. На информационных входах счетчика 37 выставлен код, соответ
ствующий начальному темпу движения. Ре-
зистор 42 и конденсатор 43 соединены с установочным входом счетчика 37 и одним входом элемента 2И 44. Обнуляющий вход счетчика 37 соединен через схему 45 задержки с датчиком 34. Датчик 34 соединяется также с вторым входом элемента 2И 44, выход которого соединен с установочным входом регистра 41.
Выходы ПЗУ 36 соединены со схемой 46 сравнения, которая формирует разницу сигналов, приходящих на ее входы и представляет собой вычитающее устройство, причем один из его входов соединяется с ключевой схемой 47 через регистр.
С датчиком 10 угла и тактильным датчиком 33 через элемент И 48 связаны электромагниты 19. Датчик 4 силы реакций соединен с компаратором 49. Датчик 10 угла связан с ключевой схемой 47, которая также связана с компаратором 49. Выход ключевой схемы 47 связан со схемой 46 сравнения, вырабатывающей сигнал рассогласования между необходимым для данного темпа движения углом сркш и фактическим его значением. Выход схемы 46 сравнения соединен с блоком 50 управления электродви
0
5 схемах К155ЛАЗ.
гателя 28. С электродвигателем 28 связан датчик 51 обратной связи, сигнал с которого поступает на блок 50 управления. С датчиком 10 угла и тактильным датчиком 33 через элемент И 48 связаны электромагниты 19. Блок 50 управления содержит усилители 52 и 53 мощности (фиг. 11), выходы которых соединены с электродвигателем 28. Входы усилителей 52 и 53-соединены со схемами ЗИ 54 и 55 соответственно. Первый и второй входы схем 54 и 55 соединены с датчиками 33 и 34. При этом третий вход схемы 54 соединен с выходом « компаратора 56, а третий вход схемы 55 - с выходом того же компа- 5 ратора 56. Компаратор 56 выполнен на микросхеме четырехразрядного сумматора К155ИМЗ. Первые входы компаратора 56 соединены с выходом схемы 46 сравнения, а вторые входы - с датчиком 51 обратной связи.
На фиг. 14 приняты следующие обозначения:
57- график зависимости приведенного момента М|кш, создаваемого .рекуператором от угла в коленном щарнире:
58- график зависимости приведенного момента Мзкш передней тянки от угла в коленном щарнире;
59- график зависимости приведенного момента Мзкш задней тянки от угла в коленном щарнире;
60- график зависимости результирующего приведенного момента Мкшот угла в коленном щарнире.
ПЗУ 36 содержит микросхемы 61-64 памяти (фиг. 15), например К155РЕЗ, и дешифратор 65, выполненный, например, на микро0
5
0
5 схемах К155ЛАЗ.
0
5
Протез работает следующим образом.
При включении источника питания счетчика 37 с помощью резистора 42 и конденсатора 43 устанавливается в исходное положение, определяемое кодом на информационных входах и соответствующее темпу движения, например произвольному. Информация с выхода счетчика 37 поступает на регистр ИР и затем - на адресные входы ПЗУ 36 и вызывает на его выходе сигнал, соответствующий углу в коленном шарнире 3 при данном темпе движения. Поступая на схему 46 сравнения, этот сигнал сравнивается с нулевым сигналом на выходе ключевой схемы 47.
Сигнал с выхода схемы 46 сравнения 0 поступает на вход компаратора 56, где сравнивается с сигналом датчика 51 обратной связи. По результату сравнения на один из элементов ЗИ 54 или 55 подается сигнал с вы.хода компаратора 56. Когда оба тактильных датчика 33 и 34 отпущены, сигнал с компаратора 56 проходит на соответствующий усилитель 52 (53) мощности и включает электродвигатель 28. Последний вращает регулировочный шнек 30 и устанав5
ливает его в положение, обеспечивающее жесткость пружины 27, необходимую для данного темпа движения. Необходимое положение шнека 30 определяется с помощью датчика 51 обратной связи. Когда коды с датчика 51 обратной связи и со схемы 46 сравнения совпадают, компаратор 56 убирает сигналы со своих выходов, и двигатель 28 оста- навливМется. Информация о, величине угла фкш с датчика 10 поступает на ключевую схему 47. Одновременно производится измерение силы реакции опоры R, датчика 4, информация о которой поступает на компаратор 49, где сравнивается с заранее заданным значением силы реакции опоры Ry, равным весу инвалида. При достижении углом фкш величины (fkiii и срабатывании датчика 33 схема И 48 включает электромагниты 19, якори которых нажимают на колодки 17 сцепления, чем создается начальный момент сцепления, который позволяет кулачку 18 провернуться относительно колодок 17. Кулачок 18, проворачиваясь относительно колодок 17 начинает их разжимать, в результате чего их внешние поверхности соприкасаются с барабаном 13 сцепления. Этот процесс в конечном итоге обеспечивает силовое замыкание между барабаном 13 сцепления и гильзой бедра 2. Дальнейшее вращение гильзы бедра происходит совместно с барабаном 13 сцепления и кривошипами 14. Это вращение через палец 15, шатун 16 и цапфы 25 передается на нажимной стакан 26, что вызывает его движение вдоль оси гильзы голени 7. При своем движении стакан 26 через фигурный паз и регулировочный шнек 30 сжимает пружину 27. В результате происходит накопление энергии в рекуператоре 5. При подгибании до угла фкш срк момент .. VlsKiii, создаваемый задней тянкой 12, изменяется по линии 59. В момент фкш задняя тянка 12 расслабляется, что обеспечивается ее регулировкой, и создаваемый его момент становится равным нулю. Этот момент времени соответствует включению рекуператора 5. Момент, создаваемый передней тянкой 11, при подгибании изменяется по линии 58. При достижении силой реакции Ry величины уровня компарации Ry компаратор 49 выдает сигнал на ключевую схему 47, что разрешает прохождение информации об угле ((кш в данный момент на схему 46 сравнения, где производится ее запоминание. Процесс накопления энергии в рекуператоре 5 и передней тянке 11 при подгибании продолжается до тех пор, пока сркш не станет равным . После этого начинается процесс разгибания протеза, происходящий под действием передней тянки 11 и рекуператора 5 и сопровождающийся отдачей накопленной энергии. В процессе разгибания пружина 27 давит через замкнутые шнеком 30 витки на нажимной стакан 26, который через цапфы 25
и щатун 16 передает усилие пружины на кривошипы 14, создавая разгибающий момент Мкш. Этот момент через сцепление колодки 17 и кулачки 18 передается на гильЗУ бедра 2, что приводит к разгибанию протеза. Этот процесс продолжается до тех пор, пока (ркш не станет равным (pfi. В этот момент включается в работу задняя тянка 21. По достижении фкш величины, равной фиш, пружина 27 рекуператора 5 полностью раз- ряжена, и .момент М|кш, создаваемый рекуператором 5, становится равным нулю. Разжимные кулачки 18 проворачиваются под действием моментов М2кш, Мзкш, создаваемых передней 11 и задней 12 тянками, от5 носительно колодок сцепления 17 и перестают прижимать их к барабану 13 сцепления. Под действием стягивающих пружин колодки 17 сходятся к центру и выходят из зацепления с барабаном 13 сцепления. Дальнейшее движение гильзы бедра 2 относи0 тельно гильзы голени 7 осуществляется путем поворота оси 20 в подшипниках 21 под действием моментов М2кш, Мзкш, создаваемых задней 12 и передней 11 тянками. Разгибание протеза продолжается до фкш
5 qSm. Этому движению соответствует изменение момента Мкш в коленном шарнире 3 по участку fm графика 60. На участке d -b происходит функциональное укорочение конечности (начальная фаза сгибания). Моменты, возникающие при этом за счет стати0 ческих и динамических сил, развиваемых инвалидом, а также тянками 11 и 12 приводят к сгибанию протеза. При фкш фкш задняя тянка 12 расслабляется и ее момент Мзкш становится равным нулю. При фкш фкш передняя тянка И ложится на ось 20
5 и создавае.мый ею момент М2кш становится равным нулю. Этот момент соответствует отрыву носка стопы 8 протеза от поверхности опоры и началу фазы переноса. При опоре на поверхность протеза срабатывает тактильный датчик 33 и разрешает0 ся прохождение импульсов с генератора 39 на счетчик 37 через схему ЗИ 38. В .момент фкш срабатывает расположенный в носке стопы 8 датчик 34. Сигнал с датчика 34 проходит через инвертор 40 на
е схему ЗИ 38 и запрещает прохождение импульса генератора 39 на счетчик 37. Одновременно он поступает через схему 2И 44 на установочный вход регистра 41 и перезаписывает в него показания счетчика. После этого, проходя через схему 45 задерж0 ки, сигнал с датчика 34 обнуляет счетчик 37. Таким образом, измеряя количество импульсов, пришедших на счетчик 37 с генератора 39 между срабатываниями датчиков 33 и 34, можно определить темп движения, так как этот промежуток меняется
5 в зависимости от темпа. Информация с регистра 41 поступает на адресные входы ПЗУ 36 и по ней из ПЗУ вызывается информация об угле фкш, соответствующем данному темпу движения. Эта информация поступает на схему 46 сравнения, где происходит ее сравнение с сркш, ранее поступившим от датчика 10 угла, об истинном угле в коленном шарнире. Полученное рассогласование поступает на блок 50 управления двигателя, на который уже поступили сигналы размеш,ения работы с тактильных датчиков 33 и 34. Блок 50 управления двигателем по информации с датчика 51 обратной связи устанавливает с помош.ыо электродвигателя 28 регулировочный шнек 30 в новое относительно пружины 27 положение. Это положение шнека 30 относительно пружины 27 придает пружине 27 новую
развиваемый рекуператором, к требуемому для данного темпа движения инвалида. После отрыва носка стопы 8 протеза от поверхности опоры при фкш происходит свободное враш,ение гильзы голени 7 на оси 20, подобное движению физического маятника. При фкш фкш передняя тян- ка 11 отделяется от оси 20 и возникает момент M2KUI, который способствует разгибанию голени 7. При qsKui сркш начинает натягиваться задняя тянка, что приводит к торможению голени и к моменту касания поверхности опоры сркш О, а протез полностью выпрямлен. Далее цикл протеза повторяется.
Формула изобретения
1. Протез бедра с управляе.мым коленным шарниром, содержащий культеприем- HHk, гильзу бедра, гильзу голени, коленный шарнир и устройство для запирания коленного шарнира, отличающийся тем, что, с целью уменьшения асимметрии походки и энергозатрат инвалида, в состав протеза введен блок управления, содержаш,ий тактильные датчики, схему определения темпа движения.
му, постоянное запоминаюшее устройство, датчик силы реакции, компаратор, датчик угла, элемент И и электромагниты, при этом
10
с ключевой схемой и информационными выходами постоянного запоминаюшего устройства, адресные входы постоянного запоминающего устройства связаны со схемой определения темпа движения, датчик силы реакции через компаратор связан с ключевой схемой, которая связана с датчиком угла, электромагниты связаны с выходом элемента И, входы которой связаны с одним из тактильных датчиков и датчиком угла, блок управления связан с устройством запирания коленного шарнира, выполненным в виде последовательно соединенных узла сцепления и рекуператора.
2.Протез бедра по п. 1, отличающий- жесткость, что позволяет уменьшить рассог- 15 ся тем, что узел сцепления содержит ба- ласование Лф и приблизить момент MIKLI, рабан сцепления с кривошипами, колодки
сцепления, связанные пружинами, и разжимные кулачки, жестко соединенные с гильзой бедра, и расположенные на барабане сцепления электро.магниты, связанные с бло- 20 ком управления, якори которых выполнены с возможностью касания фрикционных поверхностей колодок сцепления, при этом разжимные кулачки расположены в фигурных вырезах колодок сцепления.
3.Протез бедра по п. 1, отличающийся тем, что рекуператор содержит нажимной стакан, электродвигатель с редуктором, выходной вал которого связан с регулировочным шнеком, контактирующим с витками пружины с возможностью переме30 щения вдоль нее.
4.Протез бедра по п. 1, отличающийся тем, что гильза голени и гильза бедра связаны передней и задней силовыми тянками, при этом передняя тянка выполнена с возможностью касания оси колен35 ного шарнира.
5.Протез бедра по п. 1, отличающийся тем, что блок определения темпа движения содержит счетчик, элемент И, регистр, схему задержки, инвертор, причем выход генератора соединен с первым вхосхему управления электродвигателем, датчик 0 дд, первого элемента И, к второму входу перемещения, схему сравнения, ключевую схе- которого через инвертор подключен через
элемент задержки R-вход счетчика, а непосредственно - первый вход второго элемента И, второй вход которого соединен с тактильные датчики связаны со схемой опре- дс С-входом счетчика, выходы которого подклю- деления темпа движения и схемой управле-чены к регистру, и только С-вход регистра
ния электродвигателя, схема управления элек-. соединен с выходом второго элемента И, вы- тродвигателя связана с датчиком перемете-ход первого элемента И соединен с вхония и схемой сравнения, которая связанадом « + 1 счетчика.
25
10
, ГНГМ1 / /rrW
0,12-o.az-Фиг. Z
- /%) fng
(
11
V
I I fftt/cmpoe ff uf e//i/e
P
1
I . iffi/ t e/Yc/e
fHOf /S .
А.
12
фиаЛ
сриг.Б
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез нижней конечности | 1984 |
|
SU1225566A1 |
| Протез бедра | 1984 |
|
SU1237204A1 |
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Протез бедра, обеспечивающий ощущение движений | 1957 |
|
SU116003A1 |
| Механизм коленного шарнира | 1990 |
|
SU1759415A1 |
| Протез бедра | 1985 |
|
SU1447365A1 |
| Коленный механизм протеза бедра | 1985 |
|
SU1421333A1 |
| УСТРОЙСТВО для ХОДЬБЫ НА ЛЫЖАХ ИНВАЛИДА, ПОЛЬЗУЮЩЕГОСЯ ПРОТЕЗОМ БЕДРА | 1969 |
|
SU251758A1 |
| Протез бедра | 1989 |
|
SU1648447A1 |
| Протез бедра | 1985 |
|
SU1319846A1 |
Изобретение относится к медицинской технике. Цель изобретения - уменьшение асимметрии походки и энергозатрат инвалида. Протез бедра состоит из культепри- емника, гильзы бедра 2, одноосного колен ffouf/yvf) 0.8 ного шарнира .3 с узлом сцепления, датчика силы, рекуператора, голеностопного шарнира, гильзы 7 голени, стопы протеза с тактильными датчиками, блока управления протезом, датчика угла и силы реакции. Коленный шарнир 3 имеет барабаны 13 сцепления с кривошипами 14, палец 15, соединяющий кривошипы 14 с шатуном 16, колодки 17 сцепления, разжимные кулачки 18 и два управляющих электромагнита 19. Рекуператор 5 состоит из шатуна 16, пружины 27, электродвигателя 28 с редуктором 29, выходной вал которого связан с регулировочным шнеком 30. Блок определения темпа движения содержит счетчик, выполненный на микросхемах. Измеряя количество импульсов, прошедших на счетчик с генератора между срабатываниями датчиков, определяют темп движения. 4 з.п. ф-лы, 15 ил. (g S СО дзиеЛ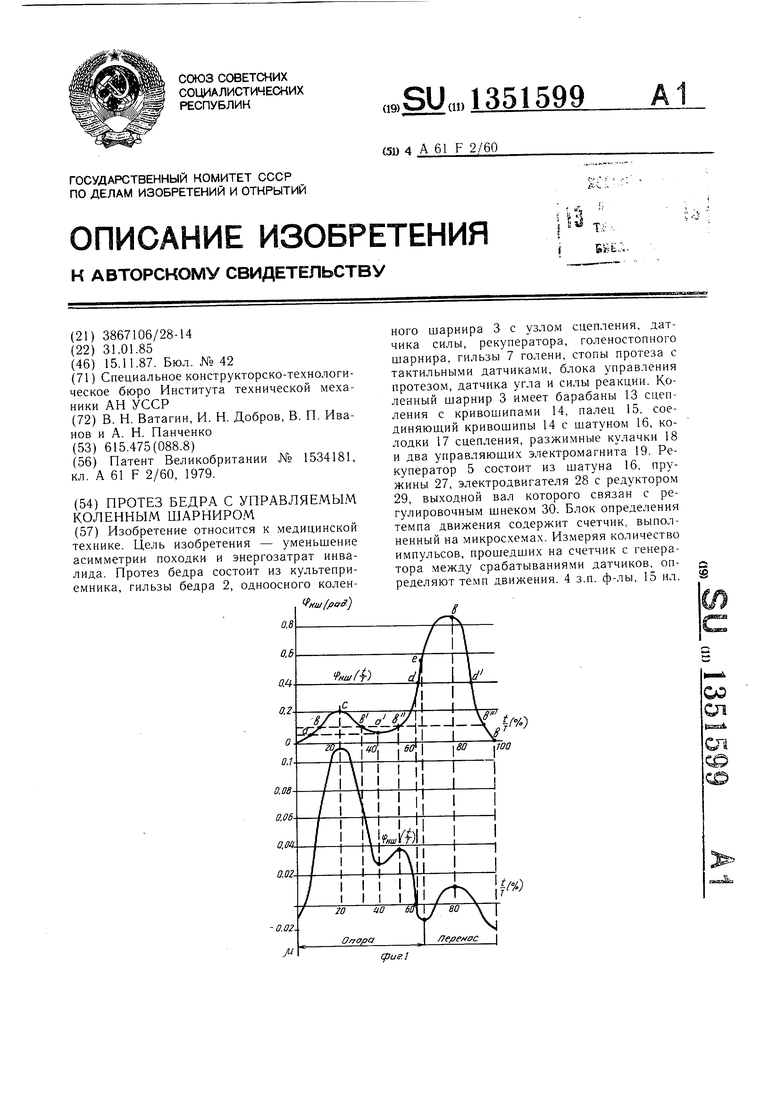
17 / //5
У
-78
20 ////Л /
2://
григ.б
ъ-в
/J
rS
д-в
«5
51
li
«У
и
W
фиг. 8
Ъ8
2
от 34
45
45
cpufS
.f(35
(pus. 10
г-Л
от-ЬЪ от
фи.11
12
Cpus:12
фие «
(fffof/paff)
X
6/4
Bi.
Ог ъQitQSOg.
7-И
фиг. 15
| Устройство для бурения скважин большого диаметра | 1988 |
|
SU1534181A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
