1 1
Изобретение относится к медицинской технике, а именно к протезированию.
Целью изобр етения является создание упругого подгибания в коленном узле в фазу опоры путем использования рычажно-шарнирного параллелограмма, связанного с коленным шарниром и упругим рекуператором энергии и имеющим электромагнитное управление перемещением своих звеньев сигналами датчиков, размещенных в стопе.
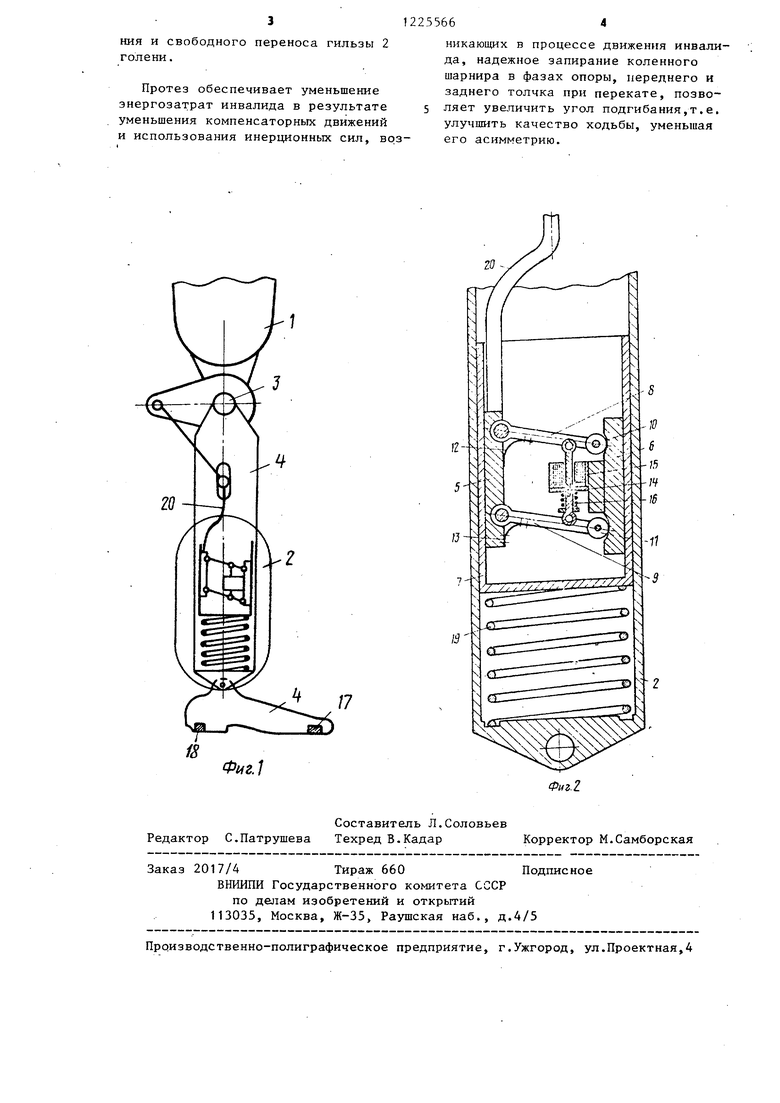
На фиг. 1 изображена кинематическая схема протеза нижней конечности; на фиг. 2 - устройство запирания коленного шарнира, продольное сечение.
Протез нижней конечности содержит гильзу 1 бедра с культепрйемни- ком (не показан), соединенную с гильзой 2 голени через коленный шарнир 3 с устройством запирания, расположеннЬвм в гильзе 2 голени, а также стопу 4, шарнирно связанную с гильзой 2 голени.
Устройство запирания вьшолнено в в иде рычажно-шарнирного параллелограмма, два противоположных плава- кйцих звена 5 и 6 которого расположены параллельно оси гильзы 2 голени в стакане 7, установленном в нем с возможностью перемещения. Два проме- жуточных звена 8 и 9 параллелограмма соединены шарнирно с одним плавающим звеном 5, а с другим звеном 6 - через ролики 10 и 11, установленные в лунках плавающего звена 6, Промежуточные звенья 8 и 9 подпружинены с помощью пружин 12 и 13 относительно плавающего звена 5 и шарнирно соединены звеном, параллельньм плавающим звеньям и являющимся якорем 14 электромагнита 15, закрепленного на плавающем звене 6 параллелограмма с лунками. Якорь 14 подпружинен с помощью пружины 16 относительно корпуса электромагнита 15, котор)ый связан через тактильные датчики 17 и 18, размещенные в стопе 4, е генератором электрических импульсов (не показан). Между стаканом 7 и гильзой 2 голени установлен упругий рекуператор 19 энергии, а плавающее звено 5 параллелограмма связано тягой 20 с коленньм шарниром 3.
Протез работает следующим образом,
В момент переднего толчка, когда инвалид начинает наступать на про255662
тез срабатывает тактильный датчик 18, установленный на пятке стопы. Он вызывает срабатывание электромагнита 15, якорь 14 начинает втягивать5 ся в электромагнит, что вызывает сжатие пружины 16. Взаимное перемещение яко ря 14 и электромагнита 15 вызывает перемещение плавающего звена 6 относительно промежуточных зве10 ньев 8 и 9 и выкатывание роликов 10 и 11 из лунок плавающего звена 6. Это приводит к поперечному перемещению плавающего звена 6 и прижатию его и плавающего звена 5 к стенкам
15 стакана 7. Под действием веса и сил, возникающих при движении инвалида, тяга 20 стремится опуститься вниз, плавающее звено 5 посредством промежуточных звеньев 8 и 9 заклини20 вает плавающее звено 6 в стакане 7. Заклинивание обеспечивается силами трения, возникающими между щеками плавающих звеньев 5 и 6 и стаканом 7. Этим обеспечивается подкосоустойчи25 вость в фазу опоры. При дальнейшем движении, происходит подгибание протеза в коленном шарнире, тяга 20 перемещается вниз (проскальзывание плавающих звеньев 5 и 6 отсутству2Q ет), совместно с ней перемещается и стакан 7, сжимая пружину упругого рекуператора 19 энергии. Подгибание осуществляется под действием суммарной силы от веса инвалида и динамических сил, возникающих при его движении. Под действием этих сил и про- исходит подгибание протеза в фазу передне го толчка. В фазу разгибания совершается перекат через ступню и выпря:мление протеза с одновременной разрядкой рекуператора. В фазу заднего TOJi4Ka нагрузка на протез постепенно падает, срабатывает тактильный датчик 17, установленный на носке ступни, который дает комагщу на включение генератора электрических импульсов, от которого импульсы начинают поступать на электромагнит 15. Импульсы, поступающие на электромагнит, вызывают вибрадию якоря 14, вибрация передается на промежу гоч- ные звенья 8 и 9, уменьшая расклинивающие силы и силы трения между плавающими звеньями 5 и 6, а также между роликами 10 и 11 и плавающим звеном 6. Таким образом, в фазу переноса, когда возникают силы, тянуище
тягу 20 вверх, создаются условия Д/1Я расклинивания устройства запира35
40
50
55
О ™ ьзь, 2
; eS :::;---z:r/--:re
1225566д
Е; - ™ « ™заднего т переднего и заднего толчка при пеоркят. г,
5 л„„ „,™ч„.ь ;„ггг
улучшить качестнп „ « .т.е. - его асимметр 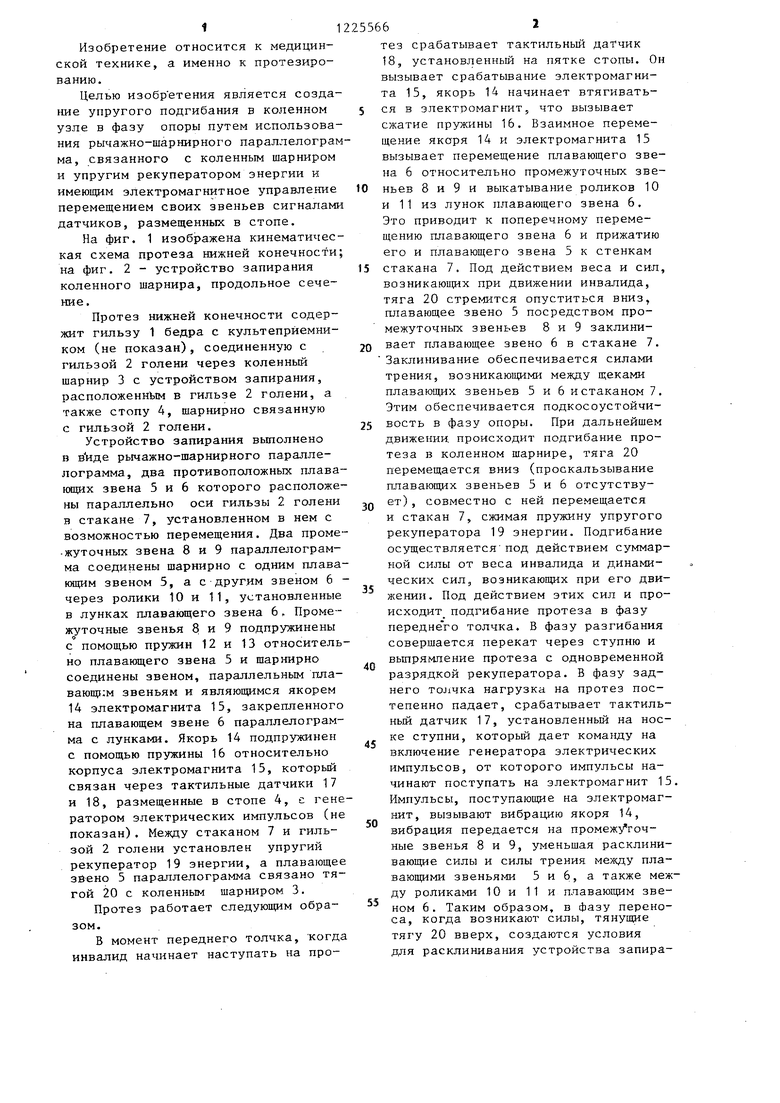
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез бедра с управляемым коленным шарниром | 1985 |
|
SU1351599A1 |
| Протез бедра | 1984 |
|
SU1237204A1 |
| Протез бедра | 1985 |
|
SU1447365A1 |
| Протез бедра | 1989 |
|
SU1648447A1 |
| Протез бедра с управляемым коленным шарниром | 1985 |
|
SU1357019A1 |
| Протез бедра | 1985 |
|
SU1292763A1 |
| ПРОТЕЗ БЕДРА | 1990 |
|
RU2019155C1 |
| Коленный механизм протеза бедра | 1985 |
|
SU1421333A1 |
| Протез бедра | 1991 |
|
SU1801416A1 |
| Протез бедра | 1986 |
|
SU1351600A1 |
./
2ff
Ре„ак. „,,р,,,,, .
2017/4т ГГ
Тираж 660
ВНВДПИ Государственного комитета СССР 11 и открьгтий 1 «-35. Раушская наб.. д 4/5
Ко По
Производственно-полиграфическое
/5
Корректор М.Самборская Подписное
предприятие, г.Ужгород, ул.Проектная,4
| Устройство для бурения скважин большого диаметра | 1988 |
|
SU1534181A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
