1
Изобретение относится к автоматике и вычислительной технике, может быть использовано в системах автоматизации процессов испытания и конроля промышленных объектов и является усовершенствованием изобретени по авт. св. № 877565.
Цель изобретения - повышение точности систейы.
На фиг. 1 приведена структурная схема предлагаемой системы; на фиг. 2 - график аппроксимированной передаточной характеристики датчика Система (фиг, 1) содержит М датчиков 1, первый коммутатор 2, измерительный блок 3, аналого-цифровой преобразователь 4, сумматор 5, счетчик 6 адреса, дополнительный блок 7 памяти, второй коммутатор 8, N блоков 9 памяти, регистрирующий блок 10 цифроаналоговый преобразователь 11 и компаратор 12, источник 13 опорного напряжения, дискретный делитель 14 напряжения, источник 15 пороговых напряжений, схемы 16 сравнения, элементы НЕ 17, злементы И 18.
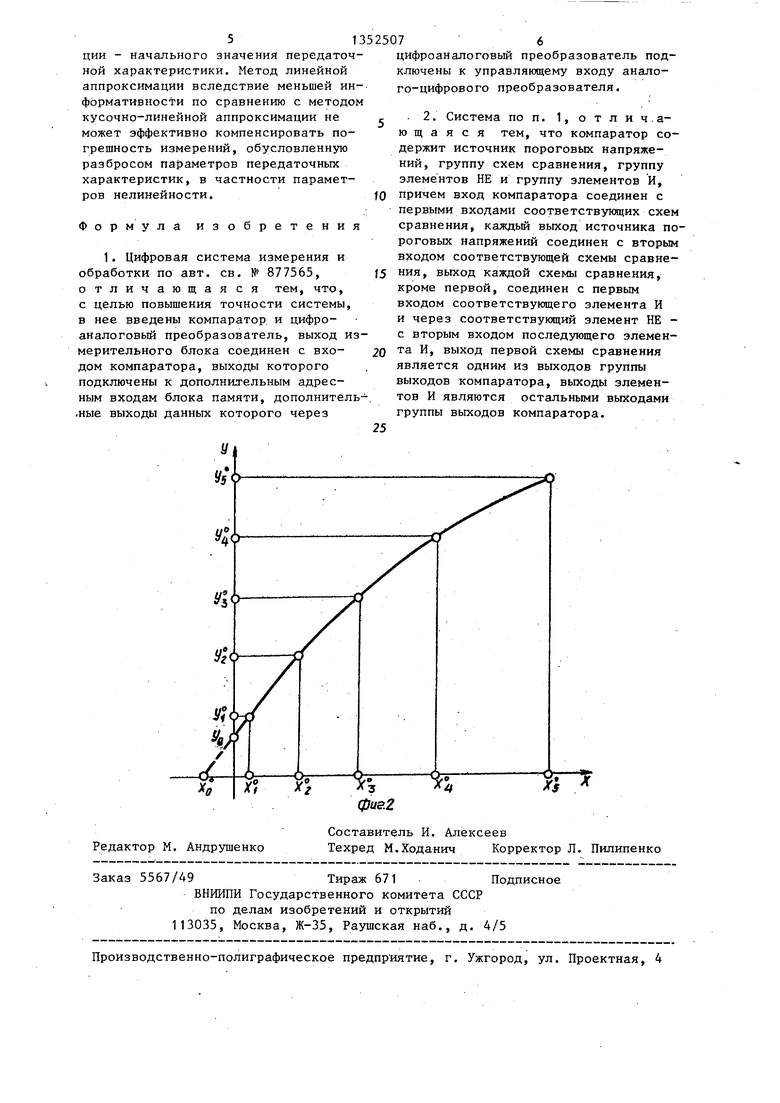
График передаточной характеристики датчика (фиг. 2) аппроксимируют кусочно-линейной кривой исходя из следующих предпосылок.
Выходные сигналы датчиков 1 приведены к единому диапазону изменений выходных сигналов у измерительного блока 3, управляемого сигналами дополнительного блока 7 памяти. Указанный диапазон разбит на L поддиа- с граничными значениями yj
лг о
пазонов
,. о
1
(х°(х°; ур,
о
УР
( у) образуют точки излома аппроксимир}лощей кривой. Начальное значение передаточной характеристики обозначено у. С целью упрощения схемы компаратора 12 гра-- ничные значения у°, у°, ..., у° для всех датчиков выбраны одинаковыми, а ряд соответствующих им значений физических величин х, х°,..., х° для г-го датчика определяют по его передаточной характеристике и соответстУказанным значениям сигналов у . соответствует ряд значений измеряемых величин х , х°, ..., х. Соответствующие пары координат
вующему коэффициенту передачи измери-во дискретных значений коэффициен- тельного блока 3. Если на выходе бло-тов измерительного блока 3. ка 3 получен результат у, находя- Символ идентификации каждого ка- щийся в k-M поддиа;тазоне (у,.у нала определяют при настройке систему ; k 1, 2, ,,,, L), то в COOT- .мы исходя из передаточной характерис1352507
интия
ветствии с фиг, кой величины
-сг
к
р-1
п
уО
Я-f
- (у,
хог- .
t k.1
bi У5
уО
1t-f
- X
or k-.l
ИЛИ
Хь
а2
где
а,
Г
k-1
t--
bl
,2
1с-1
- X
k-1
- константы
аппроксимации k-ro поддиапазона г-го датчика, определяемые передаточной характеристикой г-го датчика и соот25 ветствующим ему коэффициентом передачи измерительного блока 3.
Каждому из L поддиапазонов соответствует один из L выходов компаратора 12 и один из L управляющих вхо30 дов дополнительного блока 7 памяти. Для всех датчиков системы предварительно вычисляют константы а . , Ъ, для каждого из L поддиапазонов. При настройке системы константы
35 записывают в соответствуклдие ячейки памяти блока 7. Содержимым ячеек памяти блока 7, кроме значений констант а ,
ь;.
являются также симводы с. идентификации канала, кото- рые позволяют идентифицировать по j-му номеру канала тип г-го датчика, необходимьш оператор обработки измерительной информации, а также необходимый коэффициент передачи измеритель- ного блока 3. Таким образом, общее количество ячеек памяти блока 7 должно быть не менее М (2L+1).
Максимально необходимое число двоичного кода констант alj , b j| может . составлять п+1, где п-число разрядов выходного кода АЦП 4. Максимальное количество значений, которые могут принимать символы идентификации не более PN, где Р - количест
тики выбранного для этого канала датчика 1, коэффициента передачи измерительного блока 3, а также требуемого для этого канала оператора обработки информации. Число основных блоков 9 памяти соответствует числу различных операторов обработки, а содержимым ячеек памяти блоков 9 являются значения измеряемой величины в зависимости у - f -(N . Ъ,) , где у- - результат измерения по к аналу с номером; f; - оператор преобразования блока 9 памяти с номером i; NT - текущий (рабочий) код отсчета А1Щ 4; Ь
Vf
- значение константы из дополнительного блока 7 памяти для измерительного канала с номером j, в котором сигнал у принял значение в поддиапазоне с номером j. Максимально необходимое число ячеек памяти блока 9 для реализации системы может составлять не более чем 2
Система работает следующим образом
При задании адреса измерительного канала соответствующий сигнал с первого выхода счетчика 6 поступает на управляющий вход первого коммутатора 2 и в дополнительный блок 7 памяти.
8дешифраторе адреса блока 7 памяти этот сигнал является адресом ячейки памяти. Содержимое которой (символ идентификации) поступает на первый выход блока 7 памяти. При этом символ идентификации поступает на вход задания типа датчика измерительного блока 3 и на управляющий вход второго коммутатора 8, которьй коммутирует соответствующий основной блок
9памяти к выходу сумматора 5. Сигнал с второго выхода счетчика 6 поступает на управляющий вход измерительного блока 3, задавая необходи- мьм режим его работы. Аналоговый риг нал датчика 1 через первый коммутатор 2 поступает на информационный вход измерительного блока 3, с выхода которого сигнал измерительной информации поступает на входы АЦП 4 и компаратора 12. В компараторе 12 сигнал измерительной информации сравнивается с пороговыми значениями/напряжений , в результате чего на одном из L выходов компаратора 12 появляется сигнал соответствующего k-1 поддиапазона, которьй приходит на один из L управляющих входов дополнительного блока 7 памяти и разрешает прохождение сигнала с первого вы-
хода счетчика 6 адреса на соответствующий дешифратор адреса ячеек памяти блока 7, хранящий константы а и b j k-ro поддиапазона. Содержимое выбранной пары ячеек, хранящих
10
20
25
40
константы
30
и
со ,, j , поступает ответственно на третий и второй выходы дополнительного блока 7 памяти и далее на вход цифроаналогового преобразователя (ЦАП) 11 и второй вход сумматора 5. Напряжение с выхода ЦАП 11, пропорциональное коду константы а)( , поступает на опорный 15 вход АЦП 4, устанавливая коэффициент передачи АЦП пропорциональным крутизне прямой, аппроксимирующей передаточную характеристику датчика в k-M поддиапазоне.
Сигнал измерительной информации, преобразованной АЦП 4 в цифровую форму, поступает на первый вход сумматора 5, с выхода которого дискретный сигнал, равньй сумме поступивших на его входы сигналов от дополнительного блока 7 памяти (сигнал Ьр и от АЦП 4 (сигнал ), поступает через коммутатор 8 на вход блока 9 памяти. Соответствующая выходному сигналу блока 5 ячейка памяти блока 9 возбуждается, ее содержимое как результат измерения в необходимом для пользования виде поступает на вход регистрирующего блог, ка 10.
Таким образом, соединение опорного входа АЦП 4 с выходом ЦАП 11, которьй управляется компаратором 12 через блок 7 питания памяти, хранящий константы аппроксимации передаточных характеристик датчиков, позволяет учесть разброс параметров нелинейности передаточных характеристик и тем самым повысить точность измерений.
Предлагаемое устройство по сравнению с известным характеризуется большой точностью измерений, которая обеспечивается кусочно-линейной аппроксимацией передаточных характеристик датчиков, запоминанием параметров аппроксимации по каждому из линейных участков и использованием этих параметров при определении истинных значений измеряемых величин,
В известном устройстве используется линейная аппроксимация передаточных характеристик с запоминанием только одного параметра аппроксима35
45
50
55
ции - начального значений передаточной характеристики. Метод линейной аппроксимации вследствие меньшей информативности по сравнению с методом кусочно-линейной аппроксимации не может эффективно компенсировать погрешность измерений, обусловленную разбросом параметров передаточных характеристик, в частности параметров нелинейности.
Формула изобретения
1. Цифровая система измерения и обработки по авт. св. № 877565, о тличающая ся тем, что, с целью повышения точности системы, в нее введены компаратор, и цифро- аналоговый преобразователь, выход измерительного блока соединен с вхо- дом компаратора, выходы которого подключены к дополнительным адресным входам блока памяти, дополнитель .ные выходы данных которого через
цифроаналоговый преобразователь подключены к управляющему входу аналого-цифрового преобразователя.
. 2. Система по п. 1, о т л и ч.а- ю щ а я с я тем, что компаратор содержит источник пороговых напряжений, группу схем сравнения, группу элементов НЕ и группу элементов И, причем вход компаратора соединен с первыми входами соответствукяцих схем сравнения, каждый выход источника пороговых напряжений соединен с вторым входом соответствующей схемы сравнения, выход каждой схемы сравнения, кроме первой, соединен с первым входом соответствующего элемента И и через соответствующий элемент НЕ - с вторым входом последующего элемента И, выход первой схемы сравнения является одним из выходов группы выходов компаратора, выходы элементов И являются остальными выходами группы выходов компаратора.
/1
фи&2
Редактор М. Андрушенко
Составитель И. Алексеев
Техред М.Ходанич Корректор Л. Пилипенко
Заказ 5567/49Тираж 671Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения объемной скорости внешнего дыхания | 1989 |
|
SU1623611A1 |
| Устройство для измерения параметров газовых сред | 1980 |
|
SU894527A1 |
| Устройство аналого-цифрового преобразования | 1990 |
|
SU1837389A1 |
| Устройство для измерения температуры | 1984 |
|
SU1236330A1 |
| МОДУЛЬ ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЙ ПОСТОЯННОГО ТОКА В КОД | 2007 |
|
RU2365033C2 |
| Источник калиброванных напряжений | 1986 |
|
SU1345179A1 |
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2007 |
|
RU2352060C1 |
| Цифровой генератор функций | 1980 |
|
SU980083A1 |
| Устройство для измерения угловой скорости | 1989 |
|
SU1605776A2 |
| Многоканальное устройство для ввода аналоговых данных | 1986 |
|
SU1335972A1 |
Изобретение относится к автоматике и вычислительной технике. Изобретение может быть использовано в автоматизированных системах контроля, информационно-измерительных системах, автоматизированных измерительных комплексах. Цель изобретения повышение точности измерений информационно-измерительных систем за счет использования кусочно-линейной аппроксимации передаточных характеристик датчиков измеряемых величин. Система состоит из датчиков 1, первого 2 и второго 8 коммутаторов, блоков памяти 7 и 9, измерительного блока 3, аналого-цифрового преобразователя 4, сумматора 5, счетчика 6 адреса, регистрирующего блока 10. .Новым в устройстве является наличие в нем цифроаналогового преобразователя 11 и компаратора 12, что позволяет изменять коэффициент преобразования аналоговых сигналов в зависимости от номера участка аппроксимации и уменьшать таким образом влияние нелинейности передаточных характеристик датчиков на погрешность измерений. 1 з.п. ф-лы. 2 ил. с (Л со СП Ю СП N)
| Цифровая система измерения и обработки | 1979 |
|
SU877565A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
