элемента И 20 подключен к входу ключа 23, подключенного параллельно второму выходу сигнализатора 16 состояния буровых насосов к входу регулятора 8 тока возбуждения порошкового тормоза 2. К выходу блока 7 подключен индикатор 24. Устр-во
1
Изобретение относится к области бурения нефтяных и газовых скважин, а именно к устройствам для управления спус- коподъемными операциями (СПО) на буровых установках, где в качестве вспомогательного установлен электромагнитный фер- ропорошковый тормоз.
Цель изобретения - повышение производительности спускоподъемных операций и облегчение условий труда бурильщика в цикле подъема загруженного элеватора.
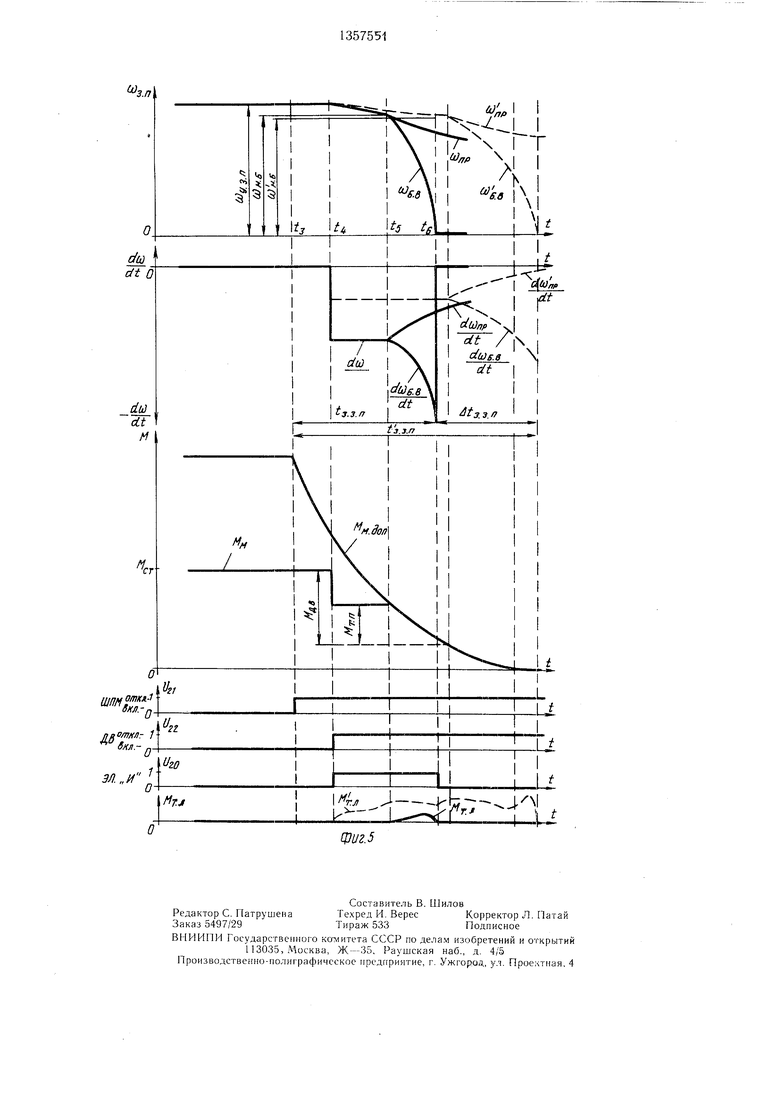
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - структурная схема блока определения направления перемеше- ния телевого блока; на фиг. 3 - структурная схема блока определения буксования шинно-пнев.матических муфт; на фиг. 4 - тип )чный режим управления в цикле подъе- Mii бурильной колонны на длину одной свечи, на фиг. 5 - графики движения подъе.м- ной системы буровой установки в период замедления в цикле подъема.
Устройство содержит тиристорный блок 1 управления электромагнитным порошковым тормозом 2 с обмоткой 3 возбуждения, запитываюшейся от тиристорного блока 1 управления, последний включает блок 4 задания скорости спуска бурильного инструмента с обратной связью по скорости на базе тахогенератора 5, первый и второй выходы которого подключены к одноименным входам блока 6 определения направления перемещения талевого блока и блока 7 определения буксования шинно-пневматичес- ких муфт (ШПМ), а также блока 4 задания скорости спуска и регулятор 8 тока возбуждения порошкового тормоза 1, находящегося на одном валу с буровой лебедкой 9 к ведомой частью шинно-пн.евмгатической муфты 10, ведущая часть муфты сочленена с валом привода 11 буровой лебедки, на котором установлен также тахогенера- тор 12 приводного вала, первый и второй выходы последнего соединены соответственно с третьим и вторым входами блока 7 определения буксования ШПМ. Буровая лебедка 9 имеет ленточный тормоз 13, уп- ра ление им осуществляется при помощи приосуш,ествляет торможение в конце цикла подъема свечи тормозом 2. Последний включается автоматически без участия ленточного тормоза 13 БЛ 9. Замок колонны ос танавливается в рабочей зоне бурового ключа. 1 з.п. ф-лы, 5 ил.
0
вода 14, связанного с блоком 15 контроля положения привода ленточного тормоза, выход которого соединен с третьим входо.м блока 4 задания скорости спуска, четвертый вход последнего подключен к первому выходу сигнализатора 16 состояния буровых насосов, второй выход которого соединен с входом регулятора 8 тока возбуждения. К входу тиристорного блока 1 уп., равления подключен коммутирующего блока 17, первый вход которого подключен к выходу блока 18 контроля клинового захвата 19 и третьему входу элемента И 20, а второй вход - к выходу блока 21 контроля щинно-пневматических
муфт 10 и второму входу элемента И 20, первый вход последнего соединен с четвертым входом блока 7 определения буксования ШПМ и с выходом блока 22 контроля двигателей привода 11 буровой лебедки, четвертый вход - с выходо.м блока 6 определения направления перемещения талевого блока, а выход - с входом ключа 23, подключенного параллельно второму выходу сигнализатора 16 состояния буровых насосов к входу регулятора 8 то5 ка возбуждения порощкового тормоза. В устройство входит также индикатор 24, подключенный к выходу 7 определения начала буксования ШПМ.
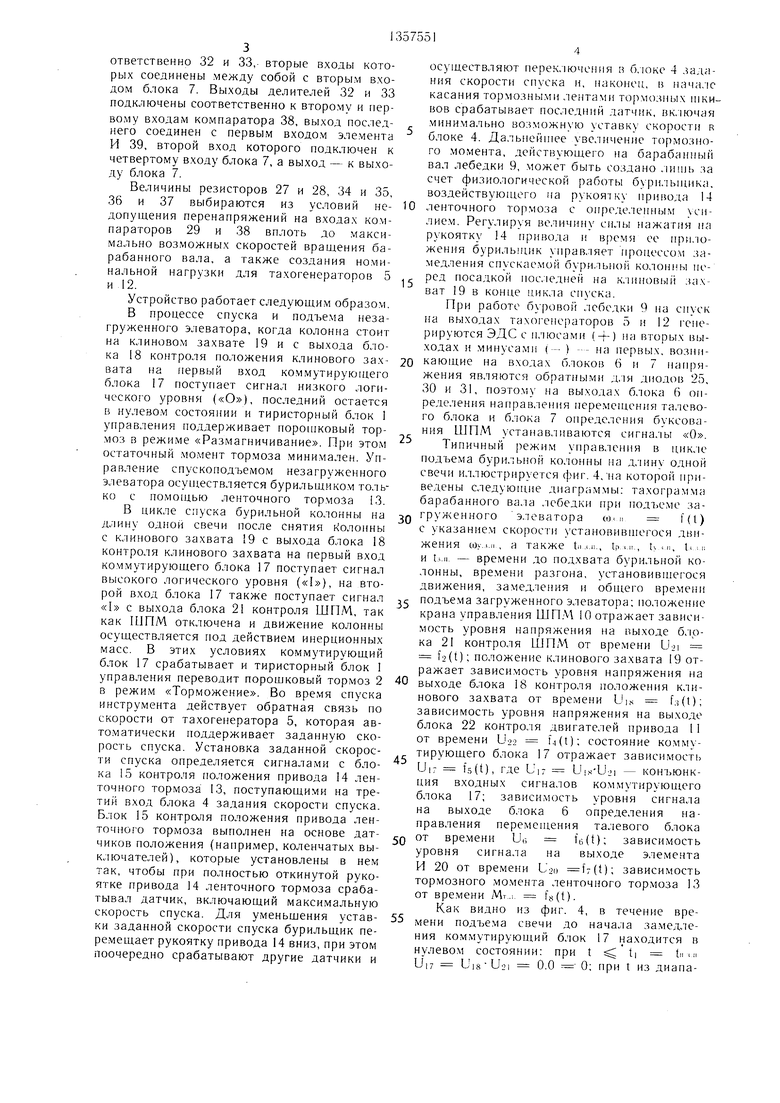
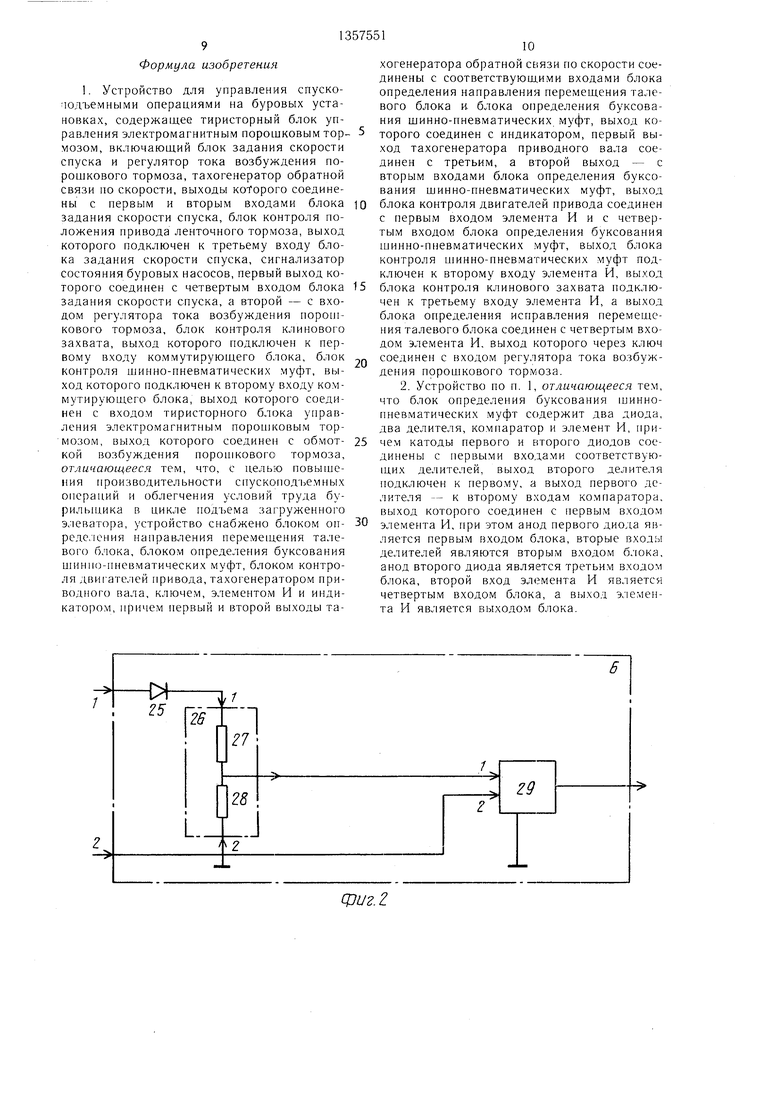
Блок 6 определения направления перемещения талевого блока включает диод 25,
0 делитель 26 напряжения резистивный на резисторах 27 и 28 и компаратор 29 так, что второй вход блока 6 соединен с вторыми входами делителя 26 и компаратора 29, а первый вход блока 6 подключен к аноду диода 25, катод которого соединен с пер5 вым входом делителя 26; выход делителя 26 соединен с первым входом компаратора 29, а выход последнего - с выходом блока 6.
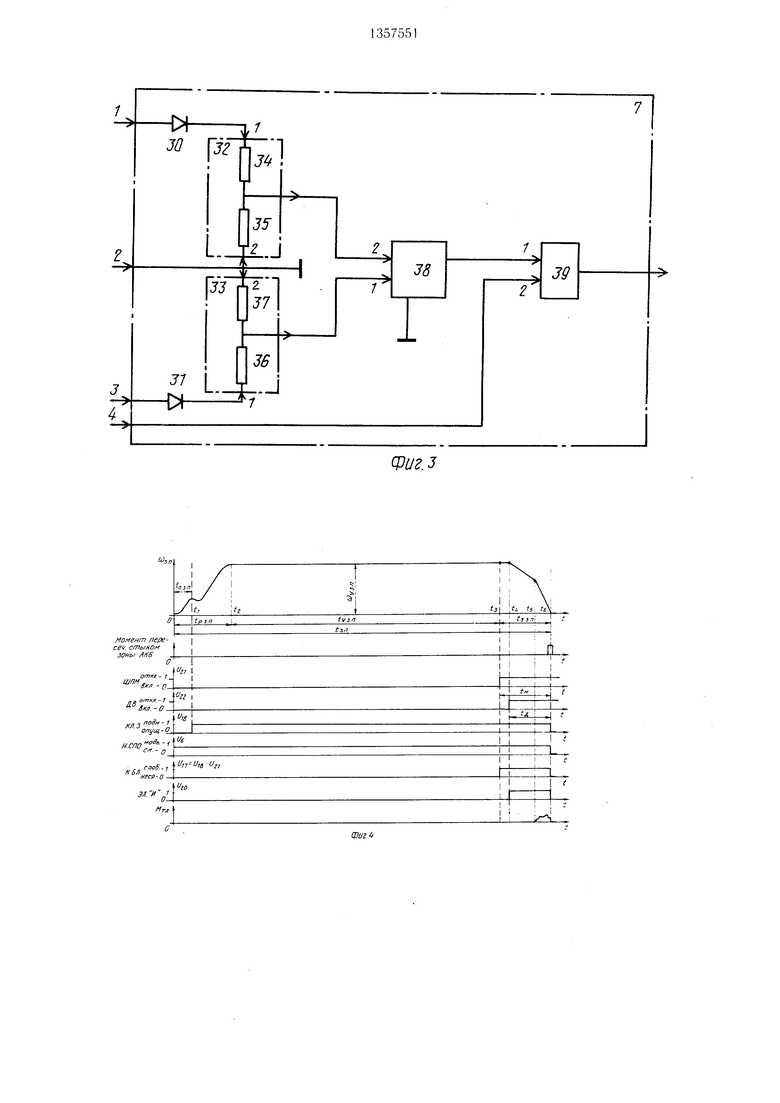
Блок 7 определения буксования ШПМ включает диоды 30 и 31, делители 32 и 33 напряжения резистивные на резисторах соответственно 34-37, компаратор 38 и элемент 39 И так, что первый и третий входы блока 7 соединены с анодами соответственно диодов 30 и 31, катоды которых подключены к первым входам делителей со0
ответственно 32 и 33,- вторые входы которых соединены между собой с вторым входом блока 7. Выходы делителей 32 и 33 подключены соответственно к второму и первому входам компаратора 38, выход последнего соединен с первым входом элемента И 39, второй вход которого подключен к четвертому входу блока 7, а выход - к выходу блока 7.
Величины резисторов 27 и 28, 34 и 35, 36 и 37 выбираются из условий не- допущения перенапряжений на входах компараторов 29 и 38 вплоть до максимально возможных скоростей вращения барабанного вала, а также создания номинальной нагрузки для тахогенераторов 5 и 12.
Устройство работает следующим образом.
В процессе спуска и подъема незагруженного элеватора, когда колонна стоит на клиново.м захвате 19 и с выхода блока 18 контроля положения клинового зах- вата на первый вход коммутирующего блока 17 поступает сигнал низкого логического уровня («О), последний остается в нулево.м состоянии и тиристорный блок 1 управления поддерживает порошковый тормоз в режиме «Размагничивание. При этом остаточный момент тормоза .минимален. Управление спускоподъемом незагруженного элеватора осуп1.ествляется бурильп1ико.м только с помоп:.ью ленточного тормоза 13.
В цикле спуска бурильной колонны на длину одной свечи после снятия колонны с клинового захвата 19 с выхода блока 18 контроля клинового захвата на первый вход коммутирующего блока 17 поступает сигнал высокого логического уровня («I), на второй вход блока 17 также поступает сигнал «1 с выхода блока 21 контроля ШПМ, так как 1ИПМ отключена и движение колонны осуществляется под действием инерционных масс. В этих условиях коммутирующий блок 17 срабатывает и тиристорный блок I управления переводит порошковый тормоз 2 в режим «Тор.можение. Во время спуска инструмента действует обратная связь по скорости от тахогеператора 5, которая автоматически поддерживает заданную скорость спуска. Установка заданной скорости спуска определяется сигналами с блока 15 контроля положения привода 14 ленточного тормоза 13, поступающими на третий вход блока 4 задания скорости спуска. Блок 15 контроля положения привода лен- ТОЧНО1-О тормоза выполнен на основе датчиков положения (например, коленчатых выключателей), которые установлены в нем так, чтобы при полностью откинутой рукоятке привода 14 ленточного тормоза срабатывал датчик, включающий максимальную скорость спуска. Для уменьщения устав- ки заданной скорости спуска бурильщик перемещает рукоятку привода 14 вниз, при этом поочередно срабатывают другие датчики и
5
0
0
0 5
0
5
5
0
осуществляют переключения в б.юке 4 задания скорости спуска и, наконец, li нача. ю касания тормозны.ми . нтами тормозных щки- вов срабатывает последний датчик, вк.ючая .минима,тьно возможную уставку скорости R блоке 4. Дальнейшее увеличение тормозного момента, действующего на бараба}|пый вал лебедки 9, может быть создано .иинь за счет физиологической работы бурильнижа, воздействующего на рукоятку привода 14 ленточного тор.моза с опреде, 1енным ycii- лием. Регулируя величину силы нажатия на рукоятку 14 привода и время ее приложения бурильщик управляет процессом замедления спускае.мой бурильной колонны перед посадкой пос.чедней на к.чиновый захват 19 в конце цикла спуска.
При работе буровой лебедки 9 па сиуск на выходах тахогеператоров 5 и 12 I ene- рируются ЭДС с плюсами ( + ) на вторых выходах и минусами (- ) - - на первых, возникающие на входах блоков 6 и 7 напряжения яв,пяются обратными д.1я диодов 25, 30 и 31, поэтому на выходах блока 6 определения направления перемепи ния талевого блока и блока 7 определения буксования ШПД 1 устанавливаются сигна.пы «О.
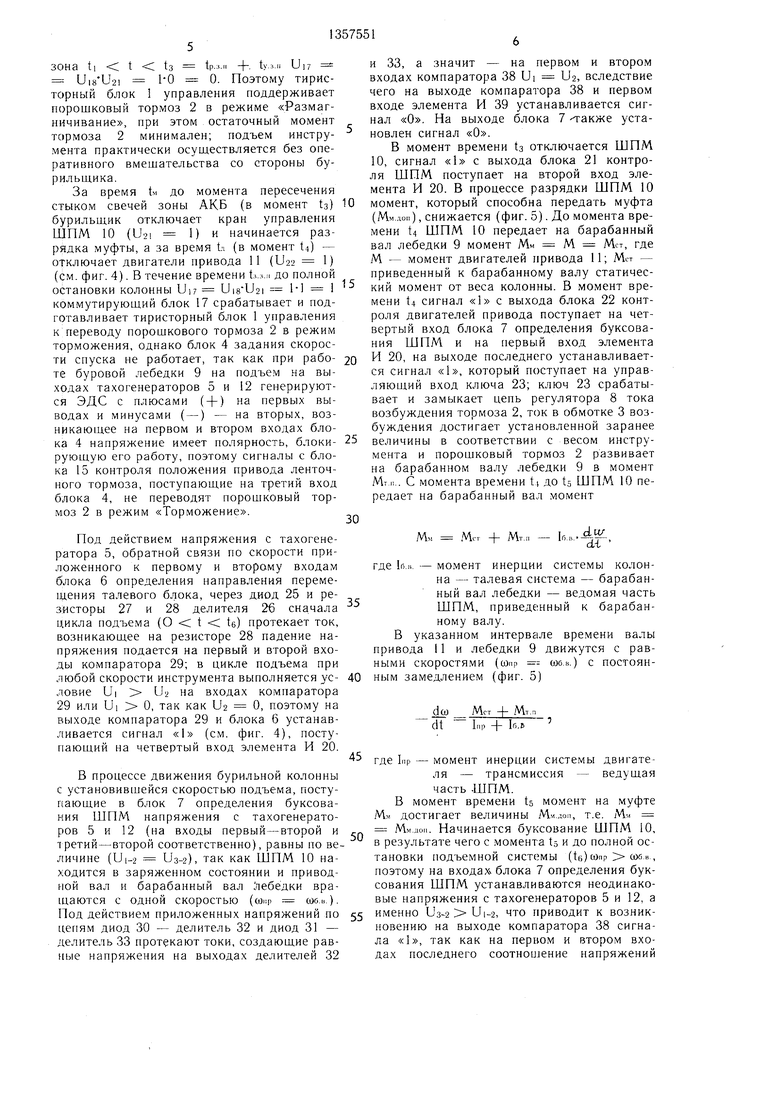
Типичный режим управления в цик.че подъема бурильной колонны на длину одной свечи иллюстрируется фиг. 4, на которой приведены следующие диаграммы; тахограмма барабанного вала лебедки при под ьеме загруженного элеватора oj. п f{t) с указание.м скорости установившегося движения (i)y.i.ii , а также tn.i.n., tpin., , t.n и t.i-n. - времени до подхвата бурильной колонны, времени разгона, установившегося движения, замедления и общего времени подъе.ма загруженного элеватора; положение крана управления ШПЛ 10 отражает зависимость уровня напряжения на выходе блока 21 контроля ШПМ от времени f2(t); положение клинового захвата 19 отражает зависимость уровня напряжения на выходе блока 18 контро,ая положения клинового захвата от времени Ui.s f.i(t); зависимость уровня напряжения па выходе блока 22 контроля двигателей привода 11 от времени U22 14(t); состояние коммутирующего блока 17 отражает завиеимост1 U|- h(i), где U|- Uix LJ-ji - конъюнкция входных сигналов коммутирующего блока 17; зависимость уровня сигнала на выходе блока 6 определения направления перемещения та,левого блока от вре.мени Uo 1б{(); зависимость уровня сигнала на выходе элемента И 20 от времени Uso 17(t); зависимость тормозного .мо.мента ленточного тор.моза 13 от вре.мени MT,.I, ( «(t).
Как видно из фиг. 4, в течение времени подъе.ма свечи до начала за.медле- ния ко.ммутирующий блок 17 находится в
нулевом состоянии; при t t; (лш
Ui7 Uis Usi 0.0 0; при t из диапазона ti t ta tp.j.ii +- ty.a.M Ui Uis Lbi I O 0. Поэтому тирис- торный блок 1 управления поддерживает порошковый тормоз 2 в режиме «Размагничивание, при этом остаточный момент тормоза 2 минимален; подъем инструмента практически осуществляется без оперативного вмешательства со стороны бу- рильшика.
За время 1м до момента пересечения
и 33, а значит - на первом и втором входах компаратора 38 Ui U2, вследствие чего на выходе компаратора 38 и первом входе элемента И 39 устанавливается сигнал «О. На выходе блока 7 -также установлен сигнал «О.
В момент времени ta отключается ШПМ 10, сигнал «1 с выхода блока 21 контроля ШПМ поступает на второй вход элемента И 20. В процессе разрядки ШПМ 10
стыком свечей зоны АКБ (в момент ts) Ю момент, который способна передать муфта
(Мм.;№11), снижается (фиг. 5). До момента времени t4 ШПМ 10 передает на барабанный вал лебедки 9 момент Мм М Мет, где М - момент двигателей привода 11; Мет - приведенный к барабанному валу статический момент от веса колонны. В момент времени t4 сигнал «1 с выхода блока 22 контроля двигателей привода поступает на четвертый вход блока 7 определения буксования ШПМ и на первый вход элемента
бурильш,ик отключает кран управления ШПМ 10 (U2 1) и начинается разрядка муфты, а за время 1л (в момент {4) - отключает двигатели привода 11 (U22 1) (см. фиг. 4). В течение времени Ьл.и до полной остановки колонны Ui Ui8 U2i 1-1 1 коммутируюпдий блок 17 срабатывает и подготавливает тиристорный блок 1 управления к переводу порошкового тормоза 2 в режим торможения, однако блок 4 задания скорос(Мм.;№11), снижается (фиг. 5). До момента времени t4 ШПМ 10 передает на барабанный вал лебедки 9 момент Мм М Мет, где М - момент двигателей привода 11; Мет - приведенный к барабанному валу статический момент от веса колонны. В момент времени t4 сигнал «1 с выхода блока 22 контроля двигателей привода поступает на четвертый вход блока 7 определения буксования ШПМ и на первый вход элемента
ти спуска не работает, так как при рабо- 20 0, на выходе последнего устанавливаетте буровой лебедки 9 на подъем на выходах тахогенераторов 5 и 12 генерируются ЭДС с плюсами ( + ) на первых выводах и минусами (-) - на вторых, возникающее на первом и втором входах блося сигнал «1, который поступает на управ- ляюпдий вход ключа 23; ключ 23 срабатывает и замыкает цепь регулятора 8 тока возбуждения тормоза 2, ток в обмотке 3 возбуждения достигает установленной заранее
ка 4 напряжение имеет полярность, блоки- 25 величины в соответствии с весом инструрующую его работу, поэтому сигналы с блока 15 контроля положения привода ленточного тормоза, поступающие на третий вход блока 4, не переводят порошковый тормоз 2 в режим «Торможение.
Под действием напряжения с тахогене- ратора 5, обратной связи по скорости приложенного к первому и второму входам блока 6 определения направления перемещения талевого блока, через диод 25 и резисторы 27 и 28 делителя 26 снцчала цикла подъема (О t ; te) протекает ток, возникающее на резисторе 28 падение напряжения подается на первый и второй вхо30
35
мента и порошковый тормоз 2 развивает на барабанном валу лебедки 9 в момент Мик. С момента времени i до to ШПМ 10 передает на барабанный вал момент
Мм Мет + Мтл, - 1г,,„..4т,
САЧ
где 1г).в. - момент инерции системы колонна - талевая система - барабанный вал лебедки - ведо.мая часть ШПМ, приведенный к барабанному валу.
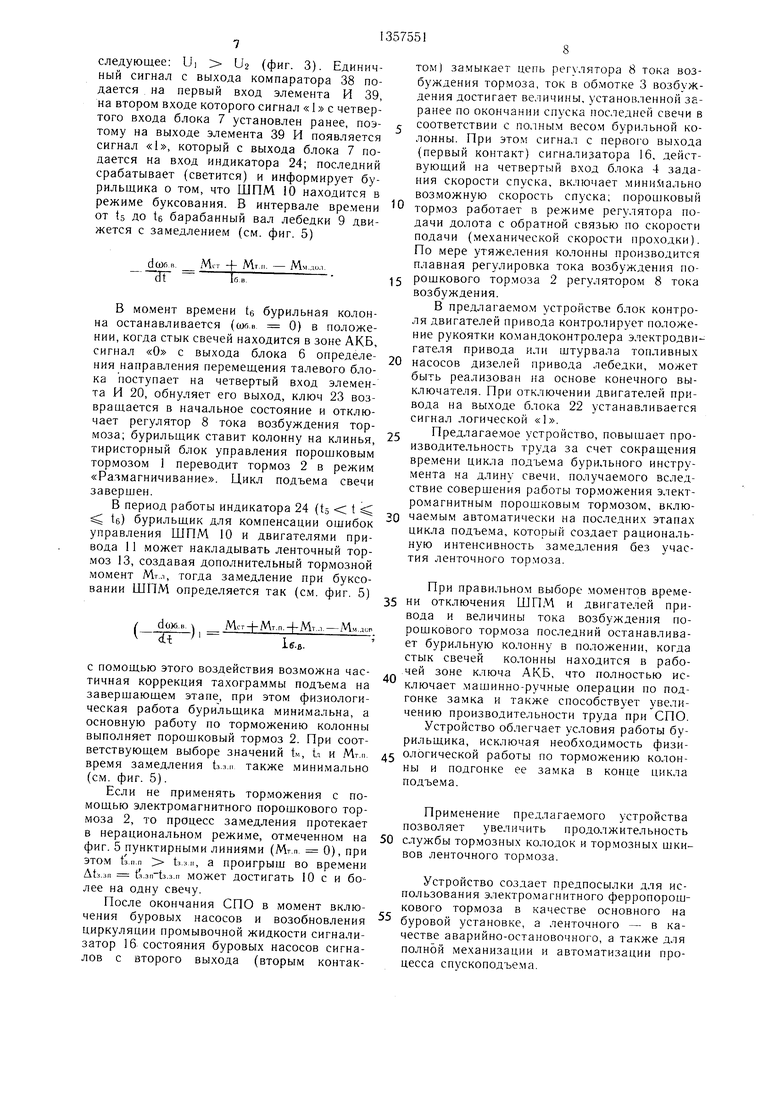
В указанном интервале времени валы привода 11 и лебедки 9 движутся с равными скоростями (Шпр Юб.в.) с ПОСТОЯНды компаратора 29; в цикле подъема при любой скорости инструмента выполняется ус- 40 ным замедлением (фиг. 5) ловие LJ| U2 на входах компаратора 29 или Ui О, так как U2 О, поэтому на выходе компаратора 29 и блока 6 устанавливается сигнал «1 (см. фиг. 4), поступающий на четвертый вход элемента И 20.
dco dt
Мет + Мтл 1пр -|- Ifi.S
- 1
45
В процессе движения бурильной колонны с установившейся скоростью подъема, посту- паюшие в блок 7 определения буксования ШПМ напряжения с тахогенераторов 5 и 12 (на входы первый-второй и третий - второй соответственно), равны по величине (U|-2 из-2), так как ШПМ 10 находится в заряженном состоянии и приводной вал и барабанный вал пебедки вра50
момент инерции системы двигателя - трансмиссия - ведущая часть .ШПМ.
В момент времени ts момент на муфте Мм достигает величины Мм.доп, т.е. М .. Мм.доп. Начинается буксование ШПМ 10, в результате чего с момента to и до полной остановки подъемной системы (t()wnp соб.в., поэтому на входах- блока 7 определения буксования ШПМ устанавливаются неодинаковые напряжения с тахогенераторов 5 и 12, а
щаются с одной скоростью (соир ом..,
Под действием приложенных напряжений по55 именно U3 2 LJi-2, что приводит к возникцепям диод 30 - делитель 32 и диод 31 -новению на выходе компаратора 38 сигнаделитель 33 протекают токи, создающие рав-ла «1, так как на первом и втором вхоиые напряжения на выходах делителей 32дах последнего соотношение напряжений
и 33, а значит - на первом и втором входах компаратора 38 Ui U2, вследствие чего на выходе компаратора 38 и первом входе элемента И 39 устанавливается сигнал «О. На выходе блока 7 -также установлен сигнал «О.
В момент времени ta отключается ШПМ 10, сигнал «1 с выхода блока 21 контроля ШПМ поступает на второй вход элемента И 20. В процессе разрядки ШПМ 10
момент, который способна передать муфта
(Мм.;№11), снижается (фиг. 5). До момента времени t4 ШПМ 10 передает на барабанный вал лебедки 9 момент Мм М Мет, где М - момент двигателей привода 11; Мет - приведенный к барабанному валу статический момент от веса колонны. В момент времени t4 сигнал «1 с выхода блока 22 контроля двигателей привода поступает на четвертый вход блока 7 определения буксования ШПМ и на первый вход элемента
ся сигнал «1, который поступает на управ- ляюпдий вход ключа 23; ключ 23 срабатывает и замыкает цепь регулятора 8 тока возбуждения тормоза 2, ток в обмотке 3 возбуждения достигает установленной заранее
величины в соответствии с весом инстру величины в соответствии с весом инструмента и порошковый тормоз 2 развивает на барабанном валу лебедки 9 в момент Мик. С момента времени i до to ШПМ 10 передает на барабанный вал момент
Мм Мет + Мтл, - 1г,,„..4т,
САЧ
где 1г).в. - момент инерции системы колонна - талевая система - барабанный вал лебедки - ведо.мая часть ШПМ, приведенный к барабанному валу.
В указанном интервале времени валы привода 11 и лебедки 9 движутся с равными скоростями (Шпр Юб.в.) с ПОСТОЯНным замедлением (фиг. 5)
едлением (фиг. 5)
dco dt
Мет + Мтл 1пр -|- Ifi.S
- 1
ным замедлением (фиг. 5)
где In
момент инерции системы двигателя - трансмиссия - ведущая часть .ШПМ.
В момент времени ts момент на муфте Мм достигает величины Мм.доп, т.е. М .. Мм.доп. Начинается буксование ШПМ 10, в результате чего с момента to и до полной остановки подъемной системы (t()wnp соб.в., поэтому на входах- блока 7 определения буксования ШПМ устанавливаются неодинаковые напряжения с тахогенераторов 5 и 12, а
следующее: Uj U (фиг. 3). Единичный сигнал с выхода компаратора 38 подается на первый вход элемента И 39, на втором входе которого сигнал «1 с четвертого входа блока 7 установлен ранее, поэтому на выходе элемента 39 И появляется сигнал «1, который с выхода блока 7 подается на вход индикатора 24; последний срабатывает (светится) и информирует бурильщика о том, что ШПМ 10 находится в режиме буксования. В интервале времени от ts до if, барабанный вал лебедки 9 движется с замедлением (см. фиг. 5)
dcofi в.Мс-т -f /
ЗГ ИГ
Мт.п. Мч.лол.
в момент времени te бурильная колонна останавливается (шдв 0) в положении, когда стык свечей находится в зоне АКБ, сигнал «О с выхода блока 6 определения направления перемещения талевого блока поступает на четвертый вход элемента И 20, обнуляет его выход, ключ 23 возвращается в начальное состояние и отключает регулятор 8 тока возбуждения тормоза; бурильщик ставит колонну на клинья, тиристорный блок управления порощковым тормозом 1 переводит тормоз 2 в режим «Размагничивание. Цикл подъема свечи заверщен.
В период работы индикатора 24 (ts t 1б) бурильщик для компенсации ошибок управления ШПМ 10 и двигателями привода 11 может накладывать ленточный тормоз 13, создавая дополнительный тормозной момент Мт..1, тогда замедление при буксовании ШПМ определяется так (см. фиг. 5)
/ doM.B. Мсг + Мт.п.+Мт.л.Мм..гсп
Vл 4- Т
iff.fl.
С ПОМОЩЬЮ этого воздействия возможна частичная коррекция тахограммы подъема на завершающем этапе, при этом физиологическая работа бурильщика минимальна, а основную работу по торможению колонны выполняет порощковый тормоз 2. При соответствующем выборе значений 1м, ta и Мт.п. время замедления 1з.:.п также минимально (см. фиг. 5).
Если не применять торможения с помощью электромагнитного порощкового тормоза 2, то процесс замедления протекает в нерациональном режиме, отмеченном на фиг. 5 пунктирными линиями (Мт.п. 0), при этом ts.n.n ta.sir, а проигрыш во вре.мени ДЬ.:,л 1з.зп-1з.з.п может достигать 10 с и более на одну свечу.
После окончания СПО в мо.мент включения буровых насосов и возобновления циркуляции промывочной жидкости сигнализатор 16 состояния буровых насосов сигналов с второго выхода (вторым контактом) замыкает цепь регулятора 8 тока возбуждения тормоза, ток в обмотке 3 возбуждения достигает величины, установленной заранее по окончании спуска последней свечи в соответствии с полным весо.м бурильной колонны. При этом сигнал с перЕзого выхода (первый контакт) сигнализатора 16, действующий на четвертый вход блока 4 задания скорости спуска, включает мини тально возможную скорость спуска; порошковый
0 тор.моз работает в режи.ме регулятора подачи долота с обратной связью по скорости подачи (механической скорости проходки). По мере утяжеления колонны производится плавная регулировка тока возбуждения по5 рошкового тормоза 2 регулятором 8 тока возбуждения.
В предлагаемом устройстве блок контроля двигателей привода контролирует положение рукоятки командоконтролера электродвигателя привода или штурвала топливных
0 насосов дизелей привода лебедки, может быть реализован на основе конечного выключателя. При отключении двигателей привода на выходе блока 22 устанавливается сигнал логической «1.
5 Предлагаемое устройство, повыщает производительность труда за счет сокращения времени цикла подъема бурильного инструмента на длину свечи, получаемого вследствие совершения работы торможения электромагнитным порошковым тормозом, вклю0 чаемым автоматически на последних этапах цикла подъема, который создает рациональную интенсивность замедления без участия ленточного тор.моза.
При правильно.м выборе .мо.ментов време- 5 ни отключения ШПМ и двигателей привода и величины тока возбуждения порошкового тормоза последний останавливает бурильную колонну в положении, когда стык свечей колонны находится в рабо„ чей зоне ключа АКБ, что полностью ис0
ключает машинно-ручные операции по подгонке замка и также способствует увеличению производительности труда при СПО. Устройство облегчает условия работы бурильщика, исключая необходимость физи5 ологической работы по торможению колонны и подгонке ее замка в конце цикла подъема.
Применение предлагаемого устройства позволяет увеличить продолжительность 0 службы тормозных колодок и тормозных шкивов ленточного тормоза.
Устройство создает предпосылки для использования электромагнитного ферропорош- кового тормоза в качестве основного на буровой установке, а ленточного - в качестве аварийно-остановочного, а также для полной механизации и автоматизации процесса спускоподъема.
Формула изобретения
1. Устройство для управления спуско- -юлъемными операциями на буровых установках, содержащее тиристорный блок управления электромагнитным порошковым тор- мозом, включаюадий блок задания скорости спуска и регулятор тока возбуждения порошкового тормоза, тахогенератор обратной связи по скорости, выходы которого соединены с первым и вторым входами блока задания скорости спуска, блок контроля положения привода ленточного тормоза, выход которого подключен к третьему входу блока задания скорости спуска, сигнализатор состояния буровых насосов, первый выход которого соединен с четвертым входом блока задания скорости спуска, а второй - с входом регулятора тока возбуждения поронь кового тормоза, блок контроля клинового захвата, выход которого подключен к первому входу коммутирующего блока, блок контроля шинно-пневматических муфт, выход которого подключен к второму входу коммутирующего блока, выход которого соединен с входом тиристорного блока управления электромагнитным порошковым тормозом, выход которого соединен с обмот- кой возбуждения порО1нкового тормоза, отличающееся тем, что, С целью повьиие- пия производительности спускоподъемных операций и облегчения условий труда бурильщика в цикле подъема загруженного элеватора, устройство снабжено блоком оп- реде.юния направления перемещения талевого блока, блоком определения буксования Ц1инп(з-пневматических муфт, блоком контроля дви ателей привода, тахогенератором приводного вала, ключем, элементом И и индикатором, причем первый и второй выходы таq3U2.Z
хогенератора обратной связи по скорости соединены с соответствующими входами блока определения направления перемещения талевого блока и. блока определения буксования щинно-пневматических муфт, выход которого соединен с индикатором, первый выход тахогенератора приводного вала соединен с третьим, а второй выход - с вторым входами блока определения буксования щинно-пневматических муфт, выход блока контроля двигателей привода соединен с первым входом элемента И и с четвертым входом блока определения буксования щинно-пневматических муфт, выход блока контроля щинно-пневматических муфт подключен к второму входу элемента И, выход блока контроля клинового захвата подключен к третьему входу элемента И, а выход блока определения исправления перемещения талевого блока соединен с четвертым входом элемента И, выход которого через ключ соединен с входом регулятора тока возбуждения порошкового тормоза.
2. Устройство по п. 1, отличающееся тем, что блок определения буксования щинно- пневматических муфт содержит два диода, два делителя, компаратор и элемент И, причем катоды первого и н торого диодов соединены с первыми входами соответствующих делителей, выход второго делителя подключен к первому, а выход первого делителя - к второму входам компаратора, выход которого соединен с первым входом элемента И, при этом анод первого диода является первым входом блока, вторые входы делителей являются вторым входом блока, анод второго диода является третьим входом блока, второй вход элемента И является четвертым входом блока, а выход элемента И является выходом блока.
(Vuz.S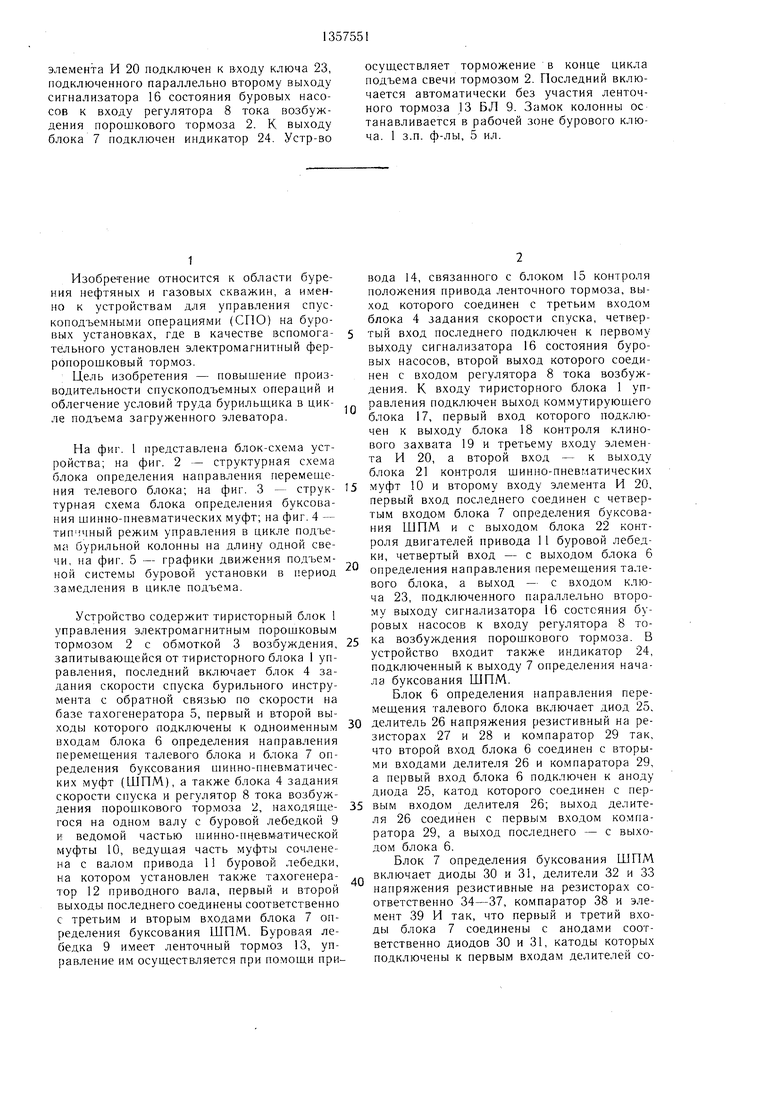
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки точности поддержания оптимальной скорости в циклах спускоподъема на буровых установках | 1989 |
|
SU1744246A1 |
| Устройство оптимизации спускоподъемных операций в бурении | 1985 |
|
SU1388550A1 |
| Грузоподъемное устройство | 1983 |
|
SU1294766A1 |
| Устройство для спуска и подъема бурильной колонны | 1981 |
|
SU1027376A1 |
| Устройство для остановки поднимаемой бурильной колонны | 1986 |
|
SU1332003A1 |
| Устройство оптимизации спуско-подъемных операций в бурении | 1987 |
|
SU1492030A1 |
| Устройство для рекуперации энергии при выполнении спускоподъемных операций с бурильной колонной | 1987 |
|
SU1587168A1 |
| Устройство для измерения вертикальных перемещений бурильной колонны | 1988 |
|
SU1557315A1 |
| Устройство для автоматизированнойпОдАчи буРОВОгО дОлОТА | 1979 |
|
SU829891A1 |
| Стабилизатор веса бурильного инструмента | 1988 |
|
SU1559129A2 |
Изобретение относится к области бурения нефтяных и газовых скважин. Цель изобретения - - новып ение производительности спускоподъемны.х операций и облегчение условий труда бурпльш,ика в цикле подъема загруженного элеватора. Для этого устр-во снабжено блоками 6 и 22 определения направления перемещения талевого блока и контроля двигателей привода 1 1 буровой лебедки (БЛ), тахогеператором 12 приводного вала, ключом 23, элементо.м И 20 и индикатором 24. К входам блока 6 подключены выходы б.чока 7 определения буксования шинпо-цневматических муфт 10, блока 4 задания скорости спуска бурильного инструмента и тахогенератора 5. Выходы последнего подключены к блоку 7. Выход блока 6 подключен к первому входу элемента И 20, к трем другим входам которого подключены коммутирующий блок 17, блок 18 контроля клинового захвата 19, блок 21 контроля муфт 10 и блок 22 контроля двигателей привода 11 БЛ 9. Выход $ о: ел СП СЛ HsHLig}0 bd пром. ж.
Составитель В. Шилов
Редактор С. ПатрушенаТехред И. ВересКорректор Л. Патай
Заказ 5497/29Тираж 533Подписное
ВИИИПИ Государственного ко митета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проехтиая, 4
| Вансович А | |||
| Р., Сулханшивилли И | |||
| Н | |||
| Тиристорная станция управления порошко- вы.м тормозом | |||
| - РНТС: Машины и нефтяное оборудование, М., ВНИИОЭНГ, 1976, № 9 | |||
| Устройство для управления спуско- подъемными операциями на буровых установках | 1978 |
|
SU791953A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
