шесгьол в седьмым вхоаами бяока формирования режюла торможения пебеаки, восшой и девятый входы которого соеавневы с первым и вторым вынолеин пульта управления, десятый в одиннадцатый входы соответственно - с вторым и третьим выходами бпока фор дирования оптимальной скорости движения талевого блока, выход сигнализатора замков подключен к двенаа1штсиъ{у входу блока фор (жирования режима торможения лебедки сельмаму входу блока формирования Ьптимапьной скорости движения талевого блока. 2 Устройство по п. 1, о т ли ч а to W. в в с я тем, что блок формирования оптимальней скорости движения таЛеЕГого блока содержит блок задания оюн тимвпьвсШ скорости спуска, блок задания Ш1тимальш й скорости подъема и блок кшо утааии, первые входы блока задания оптимальной скорости спуска и блока аадания оптимальней скорости подъема являются соответственно первым и вторы входами блока, вторые, третьи и четвертые входам блока задания оптт 4альной скорости (Жуска и блока задания оптимальнсиЁ скорости подъема соответств&}| но обьеав ны между собой и являются третьшл, четвертым и пятым входами блока, выходы блока задания оптимально скорости спуска и блока задания опти-. малыюй скорости подъема соединены соответственно с первым и BTOfttiiM вхоаа ми бпока ксж1мутаиии и являются вторым и третьим ш 1ходами блока, третий вхоа блока коммутации является шестым входом блока, пятый вход блока задания оптимальной скорости подъема является сепьмым входом блока,выход блока коммутаийЕН является первым выходом блока. 10 6 3. Устройство по п. 1, о т л и ч а ющ ё е с я тем, что блок формирования режима торможения лебедки выполнен на электронных ключах, блоке формирования сигнала рассогласования, блоке задания момента торможения и блоке задания уставки момента, первые входы блока задания мсвлента торможения и блока задания уставки момента объединены и являются первым входом блока,, вторые входы блока задания уставки момента и блока задания момента торможения являются соответственно вторым и трютьим входами бпока, третий вход блока задания момента торможения объединен с первым входом блока формирова ния сигнала рассогласования и является четвертым входом блока, третий, четвертый и пятый входы блока задания уставки момента являются соответственно пятым, шестым и седьмым входами блока, четвертый и 1ШТЫЙ входы блока задания мсмента торможения объединены соответственно с первыми входами первого и второго электронных ключей и являются , восьмым и девятым входами бпОка, вторые входы электронных ключей являются соответственно десятым и одиннадцатым входами блока, выходы электронных ключей соединены с вторым и третьим входами блока формирования сигнала рассогласования, ход которого соединен с шестым входом блока задания уставки момента и шестым входом блока задания момента торможения и является двенадцатым входом блока, а выход бпока задания момента торможения соединен с седы«(ым входом блока задания уставки MOMieHTa, выходы которого соответственно являются первым и вторым выходами блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления спуско-подъемными операциями на буровых установках | 1986 |
|
SU1357551A1 |
| Устройство для спуска и подъема бурильной колонны | 1973 |
|
SU574517A1 |
| Устройство для остановки поднимаемой бурильной колонны | 1986 |
|
SU1332003A1 |
| Устройство для автоматического управления приводом буровой лебедки при спуско-подъемных операциях | 1980 |
|
SU991035A1 |
| Устройство для спуско-подъема бурильных труб | 1981 |
|
SU977738A1 |
| Автомат для спуско-подъемных операций в бурении | 1974 |
|
SU629314A1 |
| Способ оценки точности поддержания оптимальной скорости в циклах спускоподъема на буровых установках | 1989 |
|
SU1744246A1 |
| Устройство для измерения глубины скважины | 1988 |
|
SU1520237A1 |
| Система автоматического управления скоростью спуска и подъема колонны бурильных труб | 1987 |
|
SU1476114A1 |
| Устройство автоматического управления электротормозной машиной бурового агрегата | 1982 |
|
SU1082927A1 |
1. УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА БУРИЛЬНОЙ КОЛОННЫ, содержащее соециненную с эпектроприволом буровую лебедку с тросом, один конец которого через талевый блок жестко закреплбн с основанием буровой, центратор, расположенный на одной оси с талевым блоком, автоматический элебатор, соединбнйый посредством кабель-каната с барабаном механизма передачи перёмешения талевого блока, механически соединенного с датчике скорости движения талевого блока, датчик веса, размещенный на неподвижнее конце троса буровой лебедки, клиньевой захват, датчики положения клиньев, сигнализатор замков и механический тормоз, соединенный с буровой лебедкой, отличающее с я тем, что, с целью повышения точности работы устройства, в него ведены датчик положения талевого блока, цифроаналоговые и аналого-цифровые преобразователи, блок формирования оптимальной скорости движения талевого блока, блок формирования режима торможения пебедкй в пульт згправлешя, выхош которого соединены с первым в входами блока формирования оптимальной скорости движения талевого блока, третий вход которохч) объединен с входом блока форлировавия рвттла торможения лебедки вподключев к выходу датчика поЛоженвя талевого , входной вал ко торого соединен с барабаном механизма передачи перемещения талевого блока, который подкточен к второму входу блока фо1 лвроваиия режима торможения пебеДки, датчик скорости движения тапевого блока и датчик веса соединены с первым и вто-g рым входами первого ввалсяч аифрового СП преобразователя, первый выход которого соедивен с четвертым входом блока фо| мированвя оптимальной скорости движения талевого блока в с третьим входом блока формирования режвма торможевия лебедки, а второй выход - с пятым входс«1 блока формвр жанвя оптвмальвЫ) скорости движения талевого блока в четверО тым входом блока формвроваввя режима ю торложенвя лебедки, первый выход которого через первый авфро-аналоговый пресо образователь соедввен с механическим то1 4озом, а второй выход - с клиньевым Pi захватом, выходы датчиков положенвя клввьев подключены к пятому входу блока формвроваввя режима торможевия лебедки, третвй выход которого соединев с шеотым вхоаом блока формвровавия оптвмальвой (жороств дввжеввя талевого блока, первый еыхоа которсп о через второй цвфро-авалогсжый преобразователь подключав к первому входу электропривода, выходы которого через второй аналогоци вой преобразователь соединены с
Изобретение относится к устройствам регулирования и может найти применение в устройствах управления спускоподъемкыми операциями на буровых установках с дискретной схемой спускаподъема бурового инструмента.
Извесгна система управления скорость спуска и подъема бурового инструмента, содержащая лебедку для подъема и спуска колонны труб, подъемный двигатель,
тормоз для спуска, талевый блок с элеватором, датчик скорости движения талевого блока, датчик положения талевого блока, датчик веса колонны труб 1.1.
Известная система управления предназначена для управления скоростью спуска н подъема бурильной колонны, состоящей из свечей одинаковой лпщал, и поэтому не обеспечивает поддержание оптимальной скорости подъема свечей для бурильной колонны, состоящей из огпичающихся по цпине свечей, что характерно дпя отечественных условий. При этом система управпения использует программние задание от вычислительной машины общего назначения скорости движения . элеватора, поддерживаемой в процессе спуска и подъема, и поэтому необеспечивает оперативного управления скоростью при изменении технологических параметров процесса. Наиболее близким по технической tyvir нести к изобретению является устройство для спуска и подъема бурильной колонны, содержашее лебедку с тормозом, талевый блок с элеваторов, клиньевой захват, центратор, сигнализатор замков бурильной колонны, механизм отсчета пути талевого блока с барабаном кабельканата, механизм отключения лебедки при подъеме незагруженного элеватора, датчик скорости движения барабана талевого блока, датчик веса колонны, датчик .положения клиньевг пульт бурильщика, систему электропривода лебедки с дввгателем. В качестве выключателей лебедки ис пользуется барабан Кабель-каната, сна&жвнный флажками выключателей которые сблокированы с выключателем команд аппарата, связанного с механизмом отсчета пути талевого блока. При атом блок отключения лебедки при подъеме загруженного элеватора выполнен в виде сблокированных с переключателем скорое тей выключателей с обшим кулачком, свя с oпepatивнoй муфтой и водилом дифференциала в виде рычага с роликом, размешенного в пазу диска т валу реверсивного двигателя 2). Известное техническое решение нб обеспечивает оптимальной скорости движения талевого блока при спуске и подъеме загруженного элеватора. В этом уст ройстве сигнал задания скорости движения талевого блока формируется на основ ручного задания ее уставки, фиксирован ной для заданного интервала весов коло1 ны, что приводит к увеличению зоны дои. тягивания при остановке замка бурильной колонны в зоне буровсяго ключа. Кроме того, устройству характерны наличие систематической погрешности при остановке замка бурильной холоншл. в зоне ключа, как результат фиксированного задания скорости для диапазона весов колонны при подъеме загруженного элеватора; спуск и подъем загруженного талевого блока осушествляется на ф1кс рованных, заданных бурильщиком скоростях; нерациональная скорость движения загруженного и незагруженного элеватора при выполнении спуско-подъемных операций. Целью изобретении является повышение точности работы устройства при формировании диаграммы движения элеватора при спуске и подъеме колонны. Поставленная цель достигается тем, что в устройство для спуска и подъема бурильной колонны, содержашее соединенную с электроприводом буровую лебедку с тросам, один конец которого через талевый блок жестко закреплен с основанием буровой, центратор, расположенный на осиной оси с талевым блоком, автоматичеокий эпеёатор соединенный посредством кабель каната с барабаном мехаИИзма 1юр&дачи перемещения талевого блока, механически соединенного с датчиком с;ко1 юсти движения талевого блока, датчик веса, размешенный на неподвижном конне троса буровой лебедки, клиньевс захват, аагчики положения клиньев, сигнализатор замков и механичесхнй тормоз, соединен ный с буровой лебедкой, введены датчик положения талевого бжжа, ци.фрс аналого вые н аналого-цифровые npoo6pa3OBat6nH, блок формиркяания оптимальной скорости движения талевого блока блок вания режима тормсикения лебедки в пульт управления, выхофлкоторслго Соединены с первым и вторый вхроами блока форми рования оптимально } скорости движения талевого блока, третий вход которого обьедав&я с 1юрвым-вхоася бтюка фо|(йровавш режима торможения пебедки и . подключен к выходу датчика аопожения талевого блсжа, входной вап которого соединен с. барабаном механизма явреаачи перемешеиия талевого бпока, который подключен к выходу бпока формироааиия режима тормохдания пебедкв, датчик скорости оэижеиия тапевого бпока в датчик веса соедин&ш с первым в вторым входами первого авапого-и фрового преобразовате ля, первы и выход которого соединен с четвертым входом блока фо1 мировашш оптвмапьиой скорости движения талевого блока и с третьим входом блока формирования рехснма торможеиия лебедки,а второй выход - с пятым входом блсжа формирования оптимальной скорости движения талевого блока н четвертым бжжа формирования режима та можения лебедки, первый выход которого через первый налоговый преобразователь средине с механическим тормоаом, & второй выход - с кпиньевым захватом, выходы датчиков нопожекиа кпн1О ев подключены к пятому вхоау блока фо{я вроввния режима торкюженвя пебедки, третий выход которого соединен с шестым входом блока формирования оптимальной скорости движения талЕевого блока, выход которого через второй икф х с аналоговый преобразователь подключен к входу электропривода, выходы которого через второй а шло го-иифрс«ой преобразователь соединены, с шестым и седьмым входами блока формирования режима то1%1ожения лебедки, восьмой и девятый входы которого соедийены с первым и вторым еьтоае&лъ пульта управнения/ десятый и одиннадцатый входа соответственно - с вто{&1К( и треть им выходами блока формирования сштимальвой скорости движения талевого бпо ка, выход, сигнализатора замков подклк чеи к дгтенадаатому входу бпока фо1ыирования режима торможения лебедки, седг мому входу блока формирования оптимаЛь ноК скорости движения талевого блока. Блок фо{ 1иррвания оптимальной скороо ги движения талевого блока содержит блок задания оптимальной скорости спуска, блсис задания оптимальной скоростиподъема и блок коммутации, первые входы блока задашш оптимальной скорости спуска и блока задания оптимальной скорости подъема являются соответственно першзш и BTOjfSbiM входами блока, вторш, третьи и четвертые входы блока задания оптимальной скорости спуска и блока задания оптимальней скорости подъема соответственно объед(1веиы между собой и являются rpetbm, четвертым и пятым входами блока, выходы блока задания оптимальной скорости спуска и блока задания оптимальной скорости подъема соединены соответственно с первым и вторым входами блока коммутации и являются вторь1м и третьим выходами блока, третий вход бпока к л 1утащ1и являетС Я шестым вхоаслл блока, пятый вход блока задания oi тималыюй скорости под1Е бма является седььлым вхсАОМ бпока выход блока коммутации является первым входом блока. Блок форми|рования режима торможения пебедаси шлПолнен на электронных ключах, блоке фО{ЯъШрования сигнала рассогласования, блоке задания момента торможения И бп(же задания уставки момента, перевые входы блока задания момента торможения и блока задания уставки момента объединены и являются первым входом блока, BTOja.ie входы блока задания уставки мсяи(ента и блока задания момента то{ ожения являются соответственно BTojEMJM и третьим входами блока, третий вход блока задания момента торможения объедисюн с первым входом блока формирсюания сигнала рассогласоваш1Я и является четвертым входом блока, третий, четвертый и пятый входы блока задания уставки момента являются соответственно пятым шестым и седы«а 1м входами блока, четвертый и питый входы блока задания момента торможения объединены соответственно с первыми входами первого и второго электронных ключей и являются восьмым и девятым входами блока, вторые входы эпектронных ключей являются соответственно десятым и одиннадцатым входами блока, выходы электронных ключей сое дине Н9Ы с и третьим входами.блока формирования сигнала ра.ссогласоваЮ1я, выход которого соединен с шестым входс блока задания уставки момента и шестым входом задания момента торможения ц является двенадцатым входом блока, а выход бпока задания момента торможенга соединен с седьмым входом блока задания уставки момента, выходы которого соответственно являют ся первым и входами блока. Техническая сущность изобретения состоит в том, что в зависимости от веса колоншы и положения талевого блока определяется и задается устройством оптимальная тахограмма спуска и подъема колонны. С этой целью в устройстве введены блок формирования oпти {aльнoй скорости движения талевого блока и блок формирования режима торможения лебедки, а введение д 1тчика пообжения татювого блока обеспечивает постоянсвый контроль поло жения замка при его движении в зону работы бурового ключа (на всем пути.движения талевого блока при спуске колонш 1 и на -пути движения замка от сигнализатора аамксш до зоны работы буро вого ключа при колонны). При формнрсюание оптимальной тахограммы движения загруженного и незагруженного элеватора Осуществляется с использованием режима поддержания постоянства мощности двигателя лебедки, для чего в блок формирования режима торможения введены связи по текущим выходным параметрам системы электропривода лебедки - тсжу и напряжению на двигателе лебедки.
Автоматический выбор рптимапьной тахограммы, обеспечивает без перебегов. и дотягивания остановку замка в зоне кшоча, повышение проиэвоцитепьностил агрегата при спускоподъемных операциях.
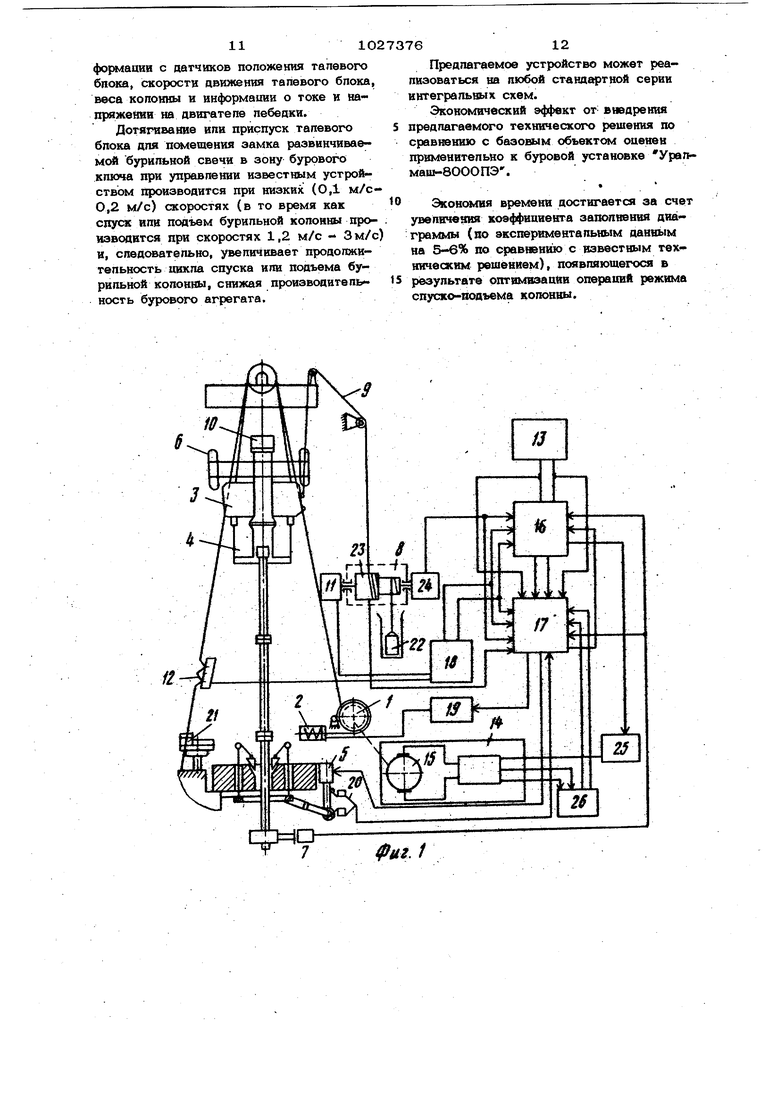
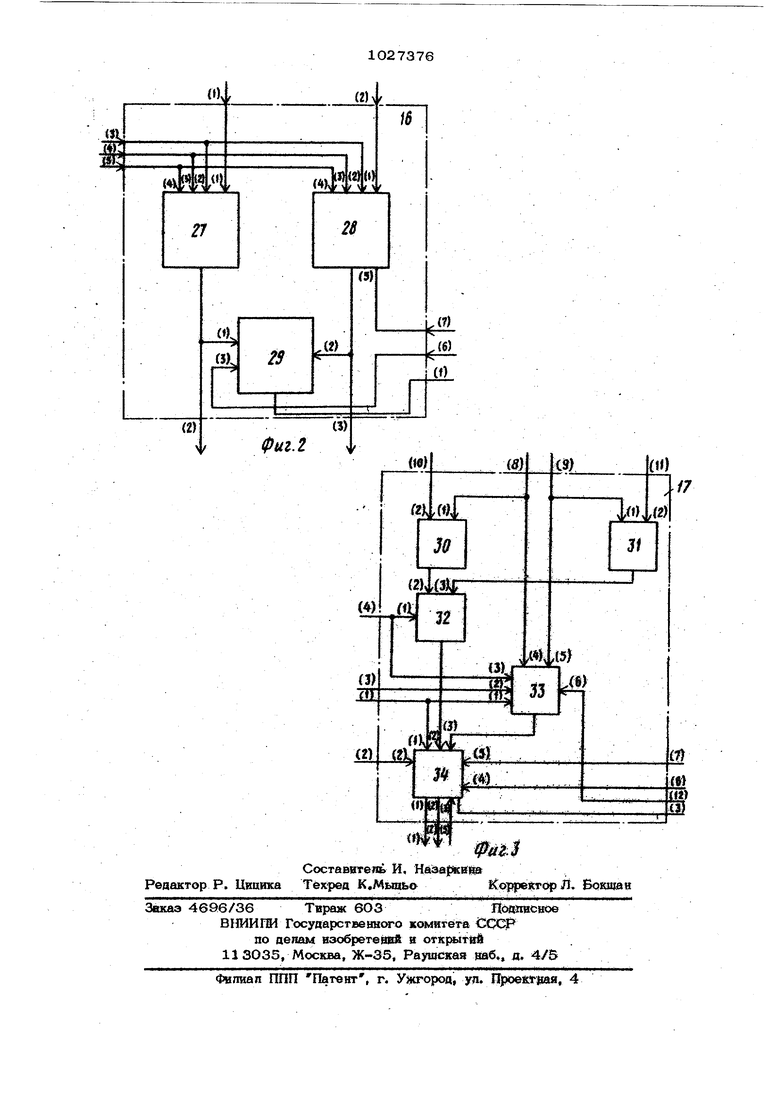
На фиг, 1 представлена схема предлагаемого устройства; на фиг. 2 - функциональная схема блока формирования оптимальной скорости движения талевого блока; на фиг. 3 - функциональная схема блока формирования режима торможенин лебедки устройства для спуска и подъема бурильной колонньк
Устройство для спуска и подъема бурильной колонны содержит буровую пебеаг ку 1 с механическим тормозом 2, талевый блок 3 с автоматическим элеватором 4, клиньевой захват 5, центратор 6, сиг нализатор 7 замков бурильной колонны, механизм 8 передачи перемещения талевого блока с барабаном кабель-каната 9, механизм 10 отключения лебедки при подъеме незагруженного элеватора 4, датчик 11 скорости движения талевого блока, датчик 12 веса колонны, пульт 13 управления, электропривод 14 с двигателем 15 постоянного тока, блок 16 формирования оптимальной скорости движения талевого блока, блок 17 формирования режима т6рможе,ния, анашго-цифровой преобразователь 18, датчик 20 положения клнньев, буровой ключ 21, механизм 8 передачи перемещения талевого блока состоит из противовеса 22 и барабана 23; датчик 24 положения
талевого блоке, цифро-аналоговый преобразователь 25, аналого-цифровой преобразсжатель 26.
Бпсж 16 формирования оптимальной скорости движения талевого блока состои (фиг. 2) из блока 27 задания оптимальной скорости при спуске, блока 28 задания сштимальной скорости при подъеме и блока 29 коммутации.
Блок 17 формирования режима то1 4ожения лебедки состоит (фиг. 3) из электронных ключей ЗЭ и 31, блока 32 формирования сигнала рассогласования, блока
33задания момента торможения, блока
34задания уставки момента.
Устройство (фиг. 1) в режиме спуска колонны работает следующим образе.
В режиме спуска колонны сигнализато 7 замков бурильной колонны отключен. Талевый блок 3 приведен в исходное нижнее положение. Очередная свеча заводится в центратор 6 и подготавливает центратор 6 к работе, механизмом 1О
отключения лебедки формируется сигнал о напичии свечи в центраторе, который поступает в блок 17 фору|крования режима торможения.
По сигналу с пульта 13 управления в блоке 16 формирования оптимальной скорости движения талевого блока блоком 27 (фиг. 2) формируется сигнал задания скорости движения талевьго блока 3, который через блок 29 коммутации сигналов выдается на систему электропривода 14 лебедки и далее на двигатель
15лебедки. Сигнал обратной связи по скорости подается датчиком 11 скороо ти движения талевого блока через аналого-ци4 вой преобразователь 18 в блоки
16и 17. Блоками 16 и 17 формируется тахограмма движения незагруженного таа&в&го блока 3. Посгае дшою часть пути талевый блок 3 проходит вместе с центратором 6..
При подходе центратора 6 к верхнему торцу свечи сигнал Свеча в центраторе с шнтратора снимается. При этом блоком
17формирования режима торможения лебедки подается сигнал на подтормаживани привода лебедки для обеспечения подхвата колонны с заданнс скоростью.
По сигналу с датчика 12 веса о взяти веса колонны на крюк 34 подается сигнал на поднятие клиньев клиньевого захвата 5, а по сигналу с датчика 2О положения клиньев блоком 17 фор 4ирования режикш торможения лебедки подеется через ци4 о-йНалого1эый преобразователь 19 в механический тормоз 2 сигнал ira растормаживание барабана лебедки 1. После чего начинается спуск колонны в скважину.
П{Н1 спуске колонны в скважину в блоке 17 блоком 34 задания уставки момента формируется уставка тормозного и обеспечивается поддержание оптимальной скорости движения талевого блока 6 зависимости от веса колонны. Необходимые сигналы для определения оптимапьвюй скорости движения талевого блока подаются с датчика 12 веса колонны и датчика 24 положения талевого блока.
Точный останов замка бурильной колоны в зове работы бурового ключа обеспечивается путем формирования переметаемого момента начала торможения (положение талевого блока, с которого уменьгшается скорость его движения). Положение талевого блока 3 - мсалент начала торможения, при достижении которого необхоаимо укленыиать скорость движения талевого блока, формируется а зависимости от веса колонны. Иэмененне . роста движекия тапевого блока 3 обеспеЧ1юается сигналом с блока Д,6 формирования оптимальной скорости движения талевого блока, поступающего череэ цифро аналоговый преобразователь 25 на сиотему апектрещриврда 14 лебедки. Уровен сигнала е блока 16 фор(.4ируется в зависшиЮсти от веса спускаемой колонны бурилыйлх труб и остащцегося пут« движения талевого блока до зоны бу рювого кгпоча .
Точная оснановка обеспб чивается по сигналу с блока 17 фо{я ир6вания го|ялсх1кёшм, яосж чего подается сигнал Ш1 опуотйве кпимьвв кли1шев0{4 захвата 5 к обеса ч1юается посадка колонны на
ХЯКЙЬЯ.
По сягшПу с датчюса 20 положешш namvti бйсясом 17 формируется сигнал вв реют ъее|живание барабана буровой |{ебддки 1« И 11еза;груженный татювый бло а|р«спускается в исходное нижнее полюжеяйе. Сигнал на Останов талевого блока 3 в ttcxoAiiOM ниж1сем положении форми| уетей в блоке 17 при совпадении сигшпов текушего полсикения талевого бло1(а 3, пЬсгуПает с датчика положения талевого блока 24, и заданного блоком 17 на цсходное нижнее положение. После octatfOBa талевого б}«ока в исходнбм нижнем положении устройство подготовлено для спуоса онеред ой свечи бу рильнсй .
В режиме подъема колонны бурильных труб :С1 гнализат ;} 7 замков бурильной копоннь приводится в рабочее положение. Таяе«4й блок 3 находится в исходном юокнем полр)1(енни. По сигналу с пульта 13 упр1аи1внйя блоком 28 задания оптимальной скорости при подъеме колонны фиг.2) задается уставка на систему Электропривода 14 лебедки вв движение элеватора 4 для подхвата коярнш 1 Сигналом с датчика 12 веса о взятии веса колоюш элеватором и сигналу с датчика 20 положения клиньев блоком 34 заДания устабки момента (фиг.З) в зависимости от величины сигнала веса колонны с датчика 12 веса и сигнала рассогласовашю оптимальной скорости и текущей скорости талевого блока, формируемого блоком 32, задается уставка тормозного м лента при движении загружбннсго элеватора 4 при подъеме колонны.
Положение тапевого блока контролируется датчиком 24 попожения. При прохождении через сигнапизатор 7 замков бурильной колонны замка, который должен остановиться в зоне работы кпюча апя развинчивания,, формируется сигнал. Сигнал с блока 7 поступает в блок 33 задания момента торможения, в котором формируется по сигналу с датчика 12 веса и ciOHany с датчика попожения .талевого б,лока 3 сигнала на задание момента начала торможения. Интенсивность задания тормозного момента формируется блокс 4 34 задания уставки момента по уровню сигнала рассогласования скоростей заданной и текущей с бпока 32 и в зависимости от положения замка бурильной колонии относительно зоны бурового ча. При этом бпоком 16 формируется-, сигнал на систему эпектропривода 14 лебедки, обеспечивающий раиирнапьное изменение скорости движения тапевого бпока для вхождения замка бурипыа 1х труб в зону бурового ключа 21, и контролируется попожение замка бурильных труб по сигналу датчика 24.
Текущее Попожение замка бурильных труб контролируется по снгнапу датчика 24 попоженню тапевого бпока.
Изменение скорости движения замка в зоне бурового ключа формируется бпоком 28, уровень уставки задания которой поступает через блок 29 коммутации сигналов к системе эпектропривода 14 лебедки.
Сигнал с датчика 24 попожения тап&вого блока о точном попожении засъпса в зоне кпюча 21 подается в блок 34, и буровая пебедка 1 по сигналу с бпока 34 задания уставки момента затормаживается, после чего опускаются клинья кпиньдвого захвата 5. По сигналу с дат чика 2О Попожения кпиньев растормаживается барабан пебедки 1, и системой эпектропривода 14 пебедки осушествляетсяприспуск тапевого бпока в исходное нижнее попожение. Поспе отвинчивания свечи и ее выноса устройство подг;отовлено к следующему цикпу прдъема колонны.
Цель изобретения достигается тем, чт устрсЛство обеспечивает остановку замка бурильной копонны точно в зоне бурового ключа без дотягивания или приспуска по оптимальной диаграмме скорости, в которой оптикшпьные значения скорости спуска и подъема, а также режимов торможения формируются в устройстве по и формации с датчиков положения тапевого блока, скорости движения тапевого бпока, веса копоикы и информации о токе и напряжении на двигатепе лебедки. Дотягивание или приспуск талевого блока для помещения замка развинчиваемой бурильной свечи в зону бурового ключа при управлении известным устройством производится при низких (ОД м/сО,2 м/с) скоростях (в то время как спуск или подъем бурильной колонны производится при скоростях 1,2 м/с - 3м/с и, след ательно, увеличивает продопксительность цикла спуска или подъема бурильной колонны, снижая производитель ность бурового агрегата. 10 76 Предлагаемое устройство может реализоваться на любой стандартной серии интегральных схем. Экономический эффект от внедрения предлагаемого технического решения по сравнению с базовым объектом оценен применительно к буровой установке Уралмаш-8ОООПЗ. Эконсвлия времени достигается за счет увеличения коэффициента заполнения диаграммы (по экспериментальным даниь1м на 5-6% по сравнению с известным техническим решением), появляющегося в результате оптимизации операций режима спуско-подъема колонны.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4187546, кл | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для спуска и подъема бурильной колонны | 1973 |
|
SU574517A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
