Изобретение относится к неразрушающему контролю образцов материалов и изделий с помощью возбуждения и регистрации ультразвуковых колебаний и может быть использовано в различных -областях промьшленности для массового контроля качества изделий из различных керамических, металлокерами- ческих и металлических материалов в форме диска, цилиндра, втулки, много- гранной призмы и т.п. .
Целью изобретения является повышение достоверности контроля за счет- корректировки значений эталонной час- то ты.
На чертеже приведена блок-схема устройства.
Устройство для контроля качества изделий содержит последовательно электроакустически соединенные генератор I качающейся частоты, возбудитель 2 и приемник 3 колебаний, блок 4 усилителей, амплитудный детектор 5, формирователь 6 строб-импульсов, блок 7 обработки сигнала, блок 8 индикации, вторым входом подключенный к Е.. выходу генератора 1 качающейся часто-
ты, RS-триггер 9 и аналоговый коммутатор }0, выходом подключенньй к входу генератора 1 качающейся частоты, последовательно соединенные первые датчик 11 перемещений и преобразователь 12 перемещение - напряжение, блок 13 модулирующего напряжения, выходом подключенньй к второму входу аналогового коммутатора 10, последовательно соединенные второй датчик 14 перемещений, второй преобразователь 15 перемещение - напряжение, аналоговьй перемножитель 16, вторым входом подключенньй к выходу первого преобразователя 12 перемещение - напряжение, и аналоговьй делитель 17, выходом подключенньй к третьему входу аналогового коммутатора 10, последовательно соединенные датчик 18 упругих деформаций и преобразователь 19 деформация - напряжение, первым выходом подключенньй к входу Делимое аналогового делителя 17, а вторым выходом - к первому входу анало- гового коммутатора 10.
Устройство работает следующим образом.
Контролируемое изделие устанавливают на упругий,- элемент (например, балку), связанньй с датчиком 18 упругих деформаций. В качестве датчика
могут быть использованы тензорезис- торы, включенные по схеме моста, меха- нотропный, электромагнитный датчики и т.д. Величина деформации упругого элемента пропорциональна массе контролируемого изделия, измеряется дат- чиком 18, затем преобразуется в напряжение преобразователем 19. Преобразователь 19 деформация - напряжение может быть выполнен в виде последовательно соединенных усилителя и схемы выборки - хранения, где запоминается напряжение, подаваемое с выхода усилителя.
Датчик 18 упругой деформации может быть выполнен как упругий элемент в форме кольца из ферромагнитного материала, которое с одной стороны закре г гшено .на массивном жестком основании, а на диаметрально противоположной стороне кольца выполнена плоская лыс- ка, на которую помещается контролируемое изделие. При измерении массы
в кольце с помощью дополнительных излучающего и приемного электромагнитных преобразователей и усилителя возбуждаются резонансные автоколебания, сдвиг частоты которых зависит от массы контролируемого изделия. Значение резонансной частоты автоколебаний кольца с изделием фиксируется преобразователем 19, состоящим из двоичного цифрового частотомера, вход
которого соединен с выходом блока усилителя -и цифроаналоговым преобразователем, выход которого соединен с входом Делимое блока аналогового делителя 17. Сброс частотомера осуществляется импульсом с RS-триггера 9. После измерения массы изделие за- . крепляют в зажимном устройстве для последующего контроля размеров и частоты, осуществляемого следующим образом.
Возбудитель 2 колебаний, на кото- рьй подается переменное по частоте напряжение с генератора 1 качающейся частоты, возбуждает через стержневые звукопроводы в контролируемо объекте механические резонансные колебания. Последние преобразуются приемником . 3 колебаний в электрический сигнал, который поступает на вход блока 4
усилителей, в котором осуществляется необходимое усиление сигнала и подавление сигналов обусловленных откликами исследуемого образца на гармонические соста,вляющие переменного напряжения
генератора 1 качающейся частоты. С этой целью он настраивается таким образом, чтобы середина полосы пропускания блока 4 усилителей совпадала с текущим значением основной частоты генератора 1 и изменялась синхронно с ней. После усиления сигнал детектируется амплитудным детектором 5, При совпадении частоты переменного напряжения генератора 1 с резонансной частотой контролируемого объекта амплитуды колебаний последнего резко увеличивается и на выходе детектора
5 появляется огибающая сигнала в фор- g ложение, при котЬром на параметричес.ме резонансного пика. Далее с выхода амплитудного детектора 5 сигнал подается на формирователь 6 строб-импульса, который вырабатывает короткий импульс в момент времени, соответст- „„ вующий переходу частотно-измеряющегося напряжения генератора 1 через максимум резонансного пика контролируемого объекта. С выхода формирователя 6 строб-импульса сигнал подается на 25 блок 7 обработки сигнала и далее на блок В индикации, на котором осуществляется индикация эталонной и резонансной частот.
ки изменяемый элемент генератора 1 подается пилообразное напряжение с блока 13 модулирующего напряжения, . тем же импульсом выключается схема выборки - хранения преобразователя 19 деформация - напряжение. Затем происходит поиск резонансной частоты контролируемого объекта в выбранном интервале частот. Обнаружение и индиг. кация резонансных частот осуществляется с помощью формирователя 6 строб- импульса, блока 7 обработки сигналов и блока 8 индикации.
Поскольку зарегистрированные частоты резонансных колебаний контролируемого объекта зависят, с одной стороны, от геометрических размеров и массы, а с другой стороны, от наличия в нем трещин, пор, раковин, сколов и т.д. ,то положение этих частот на частотной оси относительно скорректированной эталонной частоты используется в качестве критерия дефектности контролируемого изделия f f, а измеренные параметры а, Ь, m и fp служат для определения плотности (пористости) материала контролируемого изделия.
Для формирования эталонной часто- ты, кроме измерения массы, производится измерение двух размеров, которое осуществляется следующим образом.
Подвижный элемент первого датчика 11 перемещений кинематически соединен с подвижным концом Одного из двух звукопроводов, второй из которых является опорным. Выход датчика 11 перемещений соединен с преобразователем 12 перемещение - напряжение. Второй датчик 1А перемещений (расположенный в плоскости, повернутой на 90 по отношению к первому датчику) служит для измерения другого размера контролируемого изделия. С выходов первого 12 и второго 15 преобразователей перемещение - напряжение аналоговое напряжение, пропорциональное (относительно выбранной базы) величине перемещения подвижных элементов датчиков 11 и 14 перемещения при закреплении контролируемого изделия, подается на входы аналогового перемножителя 16 и далее произведение напряжений с
Делитель анало
30
35
40
45
50
Поскольку зарегистрированные частоты резонансных колебаний контролируемого объекта зависят, с одной стороны, от геометрических размеров и массы, а с другой стороны, от наличия в нем трещин, пор, раковин, сколов и т.д. ,то положение этих частот на частотной оси относительно скоррек тированной эталонной частоты используется в качестве критерия дефектности контролируемого изделия f f, а измеренные параметры а, Ь, m и fp служат для определения плотности (пористости) материала контролируемого изделия.
Определим зависимости для коэффициентов коррекции эталонной частоты, В общем случае резонансная частота контролируемого изделия простой формы (цилиндр, диск, пластина, прямая многогранная призма и т.п.) зависит от двух его размеров а b и плотности р , Контроль изделий с помощью предлагаемого устройства осуществляется по сдвигу- частоты относительно эталона (имеется в виду середина всех
выхода перемножите- се .. v.H-, -
ля подается на вход Делитель анало- допусков), который можно опре- гового делителя 17, С выхода аналого- Делить по формуле
вого делителя 17 напряжение подается через аналоговый коммутатор 10 на
63058 4
раметрически изменяемый элемент в частотно задающей цепи генератора 1 качающейся частоты. При этом на выходе генератора 1 устанавливается значение скорректированной эталонной частоты, соответствующей размерам а и b и массе m контролируемого объекта с физико-механическими характеристиками эталонного изделия.
После индикации значения эталонной частоты блоком 8 индикации RS-триггер 9 вырабатывает импульс, переклю-, чающий аналоговый коммутатор 10 в поg ложение, при котЬром на параметричес„5
0
5
0
5
0
ки изменяемый элемент генератора 1 подается пилообразное напряжение с блока 13 модулирующего напряжения, . тем же импульсом выключается схема выборки - хранения преобразователя 19 деформация - напряжение. Затем происходит поиск резонансной частоты контролируемого объекта в выбранном интервале частот. Обнаружение и индиг. кация резонансных частот осуществляется с помощью формирователя 6 строб- импульса, блока 7 обработки сигналов и блока 8 индикации.
Поскольку зарегистрированные частоты резонансных колебаний контролируемого объекта зависят, с одной стороны, от геометрических размеров и массы, а с другой стороны, от наличия в нем трещин, пор, раковин, сколов и т.д. ,то положение этих частот на частотной оси относительно скорректированной эталонной частоты используется в качестве критерия дефектности контролируемого изделия f f, а измеренные параметры а, Ь, m и fp служат для определения плотности (пористости) материала контролируемого изделия.
Определим зависимости для коэффициентов коррекции эталонной частоты, В общем случае резонансная частота контролируемого изделия простой формы (цилиндр, диск, пластина, прямая многогранная призма и т.п.) зависит от двух его размеров а b и плотности р , Контроль изделий с помощью предлагаемого устройства осуществляется по сдвигу- частоты относительно эталона (имеется в виду середина всех
е .. v.H-, -
f f
ЭТ
uf,
(О
13630586
.где uf ot да+ pub+ у um;Переходя к конечным приращениям,
да, U Ь, urn - изменение размеров получим окончательно: и массы контролируемого изделия относительно эталона;
f, - резонансная частота эталонного изделия;
йа а - а.
9Т
ЛЬ b - b & m m m
9Г
ЭТ
jT bjT , размеры и масса эталонного изделия;
а, Ь, m - размеры и масса контро- 5 лируемого изделия.
Физический смысл коэффициентов, кор- р екциио , |3 , J можно понять, анализируя выражение для значения частот - собственных колебаний изделий
20
f А {b,bj
,
(2)
где А - коэффициент формы рассматриваемого изделия; Е - модуль Юнга; р - плотность материала. Логарифмируя и беря полный дифференциал из (2) , получим
. . 2p зависит только от m
(3)
-rj- (V - объем те
0
5
0
Таким образом,
f Г 1 1л - Т д;; 9а
m.
-1
а а
,:
а + i Jl- (L 2V, V
Эт
Г
ЭА ЭЬ
m
9V
Ь Ь
ЭТ
2V
т
ЭЬ
..
т
30 Р
-9Т
9Е. 9|э
Х fir.(.l О 2V Еэт
9Е
af
p pl
ЭТ
или
35
Об С,
а а
JT
где С,,. - скорость звзтса в материа- 45 ле эталонного изделия.
Таким образом, коэффициенты коррекции ot , , у характеризуют сдвиг частоты в зависимости от изме- --нения размеров и массы контролируемоВыражая С) через (5) а (5) через 50 го изделия, что позволяет однозначно (6) и подставляя полученные выраже- определить причину сдвига частоты в ния в (З). получимпроцессе контроля, а измерение параметров а, Ь, m и f позволяет дополнительно осуществлять контроль плот- 13Е Г1 , m,9V, 3V ,П 55 ности изделий. 2§3р V da як Ь)|Jf
1 /ЗА А Эа
а + ) чЭЬ
2ЕЗр
. .1..Г.1 2р L V
9d
9b
J
dn,-.5,(
av ,.{ эь Предлагаемое техническое решение позволяет повысить достоверность контроля за счет введения автоматической коррекции значения эталонной
7Т
ЭЬ|Ь Ь
ЭТ
9Е
2 f )
у- 2т,/С„ 9р т).
метров а, Ь, m и f позволяет дополнительно осуществлять контроль плот- ности изделий.
Предлагаемое техническое решение позволяет повысить достоверность контроля за счет введения автоматической коррекции значения эталонной
частоты, учитывающей, кроме геометрических размеров, массу контролируе- .мого изделия, в случае, когда сдвиг резонансной частоты контролируемого изделия от дефекта типа трещин компенсируется сдвигом частоты от сколов либо от колебания кажущейся плотности материала изделия.
Ф о
изобретения
р м у л а
Устройство для контроля качества изделий , содержащее последовательно электроакустически соединенные генератор
-качающейся частоты, возбудитель и приемник колебаний, блок усилителей, амплитудный детектор, формирователь строб-импульса, блок обработки сигнала, блок индикации, вторым входом, йодключенный к выходу генератора качающейся частоты, RS-триггер и ана- логовьй коммутатор, выходом подклю-; ченный к входу генератора качающейся
частоты, последовательно соединенные
Составитель . Л. ИвановЧПиц Редактор И. Рыбченко Техред А.Кравчук Корректор Л. Пилипенко.
6397/33
Тираж 776Подписное
ВНИИПИ Государственного комитет СССР
по делам изобретений и открытий 113035, Москва., Ж-35, Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.Проектная, 4
5
0
первые датчик перемещений и преобразователь перемещение - напряжение, и блок модулирующего напряжения, выходом подключенный к второму входу аналогового коммутатора, отличающееся тем, что, с целью повышения достоверности- контроля, оно снабжено последовательно соединенными вторым датчиком перемещений, вторым преобразователем перемещение - напряжение, аналоговым перемножителем, вторым входом подключенным к выходу первого преобразователя перемещение - напряжение, и ана:логовым делителем, выходом подключенным к третьему входу аналогового коммутатора, последовательно соединенными датчиком упругих деформаций и преобразователем деформация - напряжение, первым выходом подключенным к входу Делимое аналогового делителя, а вторым выходом - к первому входу аналогового коммутатора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля качества изделий | 1983 |
|
SU1112271A1 |
| Устройство для контроля качества изделий | 1984 |
|
SU1233042A1 |
| Устройство для контроля качества изделий | 1988 |
|
SU1606925A1 |
| Устройство для контроля качества изделий | 1991 |
|
SU1772728A1 |
| Ультразвуковой резонансный толщиномер | 1987 |
|
SU1434246A1 |
| Устройство для контроля качества изделий | 1982 |
|
SU1019319A1 |
| Устройство для контроля физико-механических свойств ферромагнитных изделий | 1985 |
|
SU1288587A1 |
| Способ многопараметрового электромагнитного контроля ферромагнитных изделий и устройство для его осуществления | 1985 |
|
SU1288579A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 1999 |
|
RU2162592C2 |
| Ультразвуковой дефектоскоп | 1985 |
|
SU1272223A1 |
Изобретение относится к неразрушающему контролю качества изделий и предназначено для дефектоскопии изделий и образцов материалов с помощью возбуждения в регистрации ультразву- -ковых резонансных колебаний. Целью изобретения является повышение достоверности контроля за счет введения автоматической коррекции значения эталонной частоты в случае, когда сдвиг резонансной частоты изделия от дефекта типа трещины компенсируется сдвигом частоты от сколов либо от колебаний плотности материала изделия. Для этого в устройство введены вторые датчик 14 перемещений, преобразователь 15 перемещение - напряжение, аналоговые умножитель 16 и делитель 17, а также канал измерения массы изделия, состоящий из датчика 18 упругой деформации и преобразователя 19 деформация - напряжение. 1 ил. (Л со о: со о ел ОС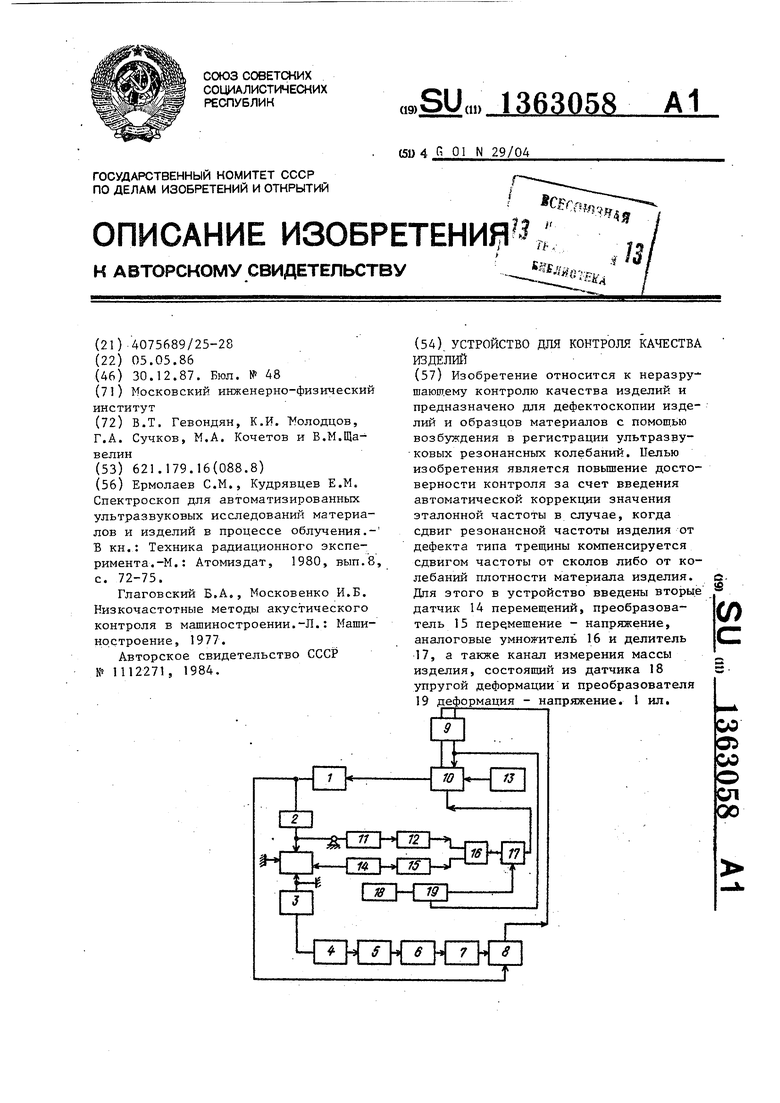
| Ермолаев С.М., Кудрявцев Е.М | |||
| Спектроскоп для автоматизированных ультразвуковых исследований материалов и изделий в процессе облучения.- Б кн.: Техника радиационного эксперимента | |||
| -М.: Атомиздат, 1980, вып.8, с | |||
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| Глаговский Б.А., Московенко И.Б | |||
| Низкочастотные методы акустического контроля в машиностроении.-Л.: Машиностроение, 1977 | |||
| Устройство для контроля качества изделий | 1983 |
|
SU1112271A1 |
