Д р--1 кпытуекое
Т/г
00 а о со ;о
Изобретение относится к испытательной технике и может быть использовано для определения характеристик изделий по значению частот резонансных колебаний.
Цель изобретения - расширение области применения устройства за счет оптимизации фазовой автоподстройки на частоту собственных колебаний испытуемых изделий при работе устройства в частотном диапазоне, перекрывающем несколько декад.
На чертеже представлена функциональная электрическая схема устройства.
Устройство содержит входной меха- ноэлектрический преобразователь 1, выход которого подключен к входу первого измерительного блока 2 и через резистор 3 к входу нелинейного блока 4. Выход первого измерительного блока 2 подключен к первому входу первого блока 5 сравнения, второй вход которого соединен с первым входом бло- ка 6 программы. Вход нелинейного блока 4 подключен к выходу второго реверсивного мостового переключателя 7 а также через резистор 8 к входу функционального преобразователя 9. Выход нилинейного блока 4 подключен к вх оду первого реверсивного мостового переключателя и к входу второго реверсивного мостового переключателя 7. Одна диагональ первого реверсивного мостового переключателя 10 подключена к выходу преобразователя 11 напряжения в разйонаправленные токи, а выход его - к входу первого интегратора 12, выход которого подключен к входу функционального преобразователя 9 и к входу второго измерительного блока 13. Выход второго измерительного блока 13 подключен к первому входу второго блока 14 срав
ключен выход + источника 15 разно- полярного напряжения. Оба выхода источника 15 разнополярного напряжения подключены через резисторы 16 и 17 к диагонали второго реверсивного мостового переключателя 7. Выход второго блока 14 сравнения через интегрирующий блок 18 с ограничением подключен к первому входу третьего блока 19 сравнения, второй вход которого соединен с выходом блока 6 программы, а выход - с входом преобразователя 11 напряжения в разнонаправленные то
5
о 5
ки. Выход функционального преоразо- вателя 9 подключен к первому входу блока 20 умножения, второй вход которого через второй интегратор 21 подключен к выходу первого блока 5 сравнения, а выход блока 20 умножения - к входу выходного электромеханического преобразователя 22.
Устройство работает следующим образом.
Перед включением устройства к испытуемому изделию подсоединяются преобразователи 1 и 22, в результате чего изделие оказывается включенным в |замкнутый контур из элементов 1, 3, 4, 10, 12, 9, 20 и 22. Начальная частота автоколебаний в этом контуре устанавливается напряжением с второго выхода блока 6 программы.
В начале работы устройства на выходе интегрирующего блока 18 с ограничением формируется уровень , а
0
5
0
5
0
5
сравне и +
на выходе третьего блока 19 ния - выходное напряжение U + и . Напряжение U, преобразуется преобразователем 11 в разнонаправленные токи одинаковой величины ±i. При включении устройства нелинейный блок 4 устанавливается в одно из двух устойчивых состояний, например характеризуемое положительным выходным потенциалом +Ui,. Это вызывает поступление на вход первого интегратора 12 через первый реверсивный мостовой переключатель 10 тока t 5 При этом напряжение U на выходе интегратора будет изменяться по линейному закону в отрицательную сторону до момента, когда напряжение U g на входе нелинейного блока 4 изменит знак и станет отрицательным. Тогда произойдет переключение нелинейного блока 4 в другое устойчивое состояние, характеризуемое отрицательным выходным потенциалом - и„. Следовательно, через первый реверсивный мостовой переключатель 10 будет протекать ток -i ,. с входа первого интегратора 12 и на выходе первого интегратора 12 напряжение начнет меняться в положительную сторону до очередного переключения нелинейного блока 4.
Амплитуда треугольных колебаний на выходе первого интегратора 12 регулируется через второй реверсивный мостовой переключатель 7 за счет изменения величины напряжения ±11 д с выходных шин источника 15 разнополяр31
ного напряжения. Второй измерительный блок 13 преобразует напряженней в сигнал положительной полярности и, , величина которого равна амплиту де треугольного сигнала. Поэтому по прошествии периода колебаний сигнал на выходе второго блока сравнения п А 1 оказывается равным нулю. Испытуемое изделие будет возбуж- даться сигналом синусоидальной формы и ,j , который через блок 20 умножения прикладывается к входу выходного электромеханического преобразователя 22. По мере раскачки изделия увели- чивается амплитуда сигнала с выхода входного механоэлектрического преобразователя 1. Этот сигнал через резистор 3 прикладывается к входу нелинейного блока 4. В автоколебательном контуре возможны три случая установления частоты автоколебаний, которая равна собственной частоте испытуемо- гого изделия.
В первом случае напряжением U за даются такие величины токов ti.,-, поступающих через первый реверсивный мостовой переключатель 10 на вход первого интегратора 12, что амплитуд треугольного сигнала U, равна задан ной величине Пд при любой амплитуде сигнала Uj с выхода входного механоэлектрического преобразователя 1. Пр этом фазовый сдвиг между сигналами и (, и и ,j равен TT/Z, что характерно для автоколебаний с частотой собст- ственных колебаний испытуемого изделия, когда преобразователь 1 работае в режиме аксельрометра.
Во втором случае напряжением U задаются такие величины токов ±ij, поступающих через первый реверсивный мостовой переключатель 10 на вход первого интегратора 12, что амплитуд треугольного сигнала в переходном процессе оказывается меньше заданной
величины и при любой амплитуде сигнала и, с выхода механоэлектрическо- го преобразователя 1. При этом фазовый сдвиг между сигналами U и U оказывается меньше /2, что характерно для автоколебаний с частотой, ниже частоты собственных колебаний испытуемого изделия, когда преобразователь 1 работает в режиме аксельрометра, В результате измерения амплитуды сигнала U вторым измерительным блоком 13 и сравнения выходного сигнала и,, блока 13 с задаваемым уров„
5 0
5 о
0
нения формируется сигнал U j - Uj . Этот сигнал U,
5
нем и, на выходе второго блока срав и. приложенный
к входу интегрирующего блока 18 с ограничением, вызывает увеличение уровня напряжения на его выходе. Поэтому нарастает сигнал U U +U , приложенный к входу преобразователя напряжения в разнонаправленные токи, а следовательно, и крутизна изменяющегося напряжения на выходе первого интегратора 10. Как следствие, увеличивается частота автоколебаний в контуре до момента, когда амплитуда и не достигнет установленного значения и.
Третий случай установления частоты автоколебаний возможен, если в переходном процессе амплитуда сигнала на |выходе первого интегратора превысит ;установленное значение U. При этом фазовый сдвиг между сигналами U , и Uj оказывается больше J/2, что характерно для автоколебаний с частотой, выше частоты собственных колебаний испытуемого изделия, когда преобразователь 1 работает в режиме аксельрометра. Последуюгций процесс настройки амплитуды колебаний U, а следовательно, и частоты автоколебаний, аналогичен указанному для второго случая .
Регулирование амплитуды испытуемого изделия в соответствии с программой осуществляется после настройки на частоту собственных колебаний с помощью канала регулировки уровня возбуждения. Для этого измеряется амплитуда сигнала U с выхода преобразователя 1 с помощью первого измерительного блока 2. Выходной уровень напряжения с выхода блока 2 сравнивается с помощью первого блока 5 сравнения с сигналом с первого выхода блока 6 программы. На выходе блока 5 формируется сигнал рассогласования, если уровень колебаний испытуемого изделия не соответствует заданному по данной ступени нагружения. Этот сиг-т нал рассогласования, прикладываемый к входу второго интегратора 21, вызывает изменение выходного напряжения на выходе интегратора 21 и следовательно изменение коэффициента передачи блока 20 умножения до момента, когда сигналы с первого выхода блока 6 программы и выхода первого измерительного блока 2 не окажутся равными
по величине. Переход к следующей ступени нагружения осуществляется за счет изменения величины напряжения на первом вьгходе блока 6 программы.
Ь
блок, второй блок сравнения, интегрирующий блок с ограничением и третий блок сравнения, включенные последовательно между выходом первого интегратора и входом преобразователя напряжения в разнонаправленные токи, функциональный преобразователь с входом, подключенным к выходу первого таний изделий в автоколебательном pe-iQ интегратора, блок умножения, у которого входы соединены с выходами функционального преобразователя и второго интегратора, а выход подключен к входу выходного электромеханического g преобразователя, второй реверсивный мостовой переключатель, вход которого подключен к выходу нелинейного блока, выход соединен через первый резистор с выходом первого интегратора и с входом нелинейного блока, подключенным через второй резистор к выходу входного механоэлектрического преобразователя, а вторая диагональ через токозадающие резисторы соединена с первый блок сравнения, к второму вхо- 25 выходными шинами источника разнопо- ду которого подключен первый выход лярного напряжения, при этом одна вы- блока программы, и второй интегратор, ходкая шина источника разнополярного отличающееся тем, что, с напряжения соединена с вторым входом целью расширения области применения, второго блока сравнения, а второй в него введены источник разнополярно-- д вход третьего блока сравнения подклю- го напряжения, второй измерительный цен к второму выходу блока программы.
Формула изобретения
Устройство для программных испыханический преобразователь, соединенные последовательно входной механо- злектрический преобразователь, нелинейный блок, первый реверсивный мостовой переключатель, у которого одна диагональ подключена к выходу преобразователя напряжения в разнонаправленные токи, и 1тервый интегратор, а также канал регулировки уровня возбуждения, включающий последовательно соединенные первый измерительный блок, подключенный к выходу входного механоэлектрического преобразователя,
20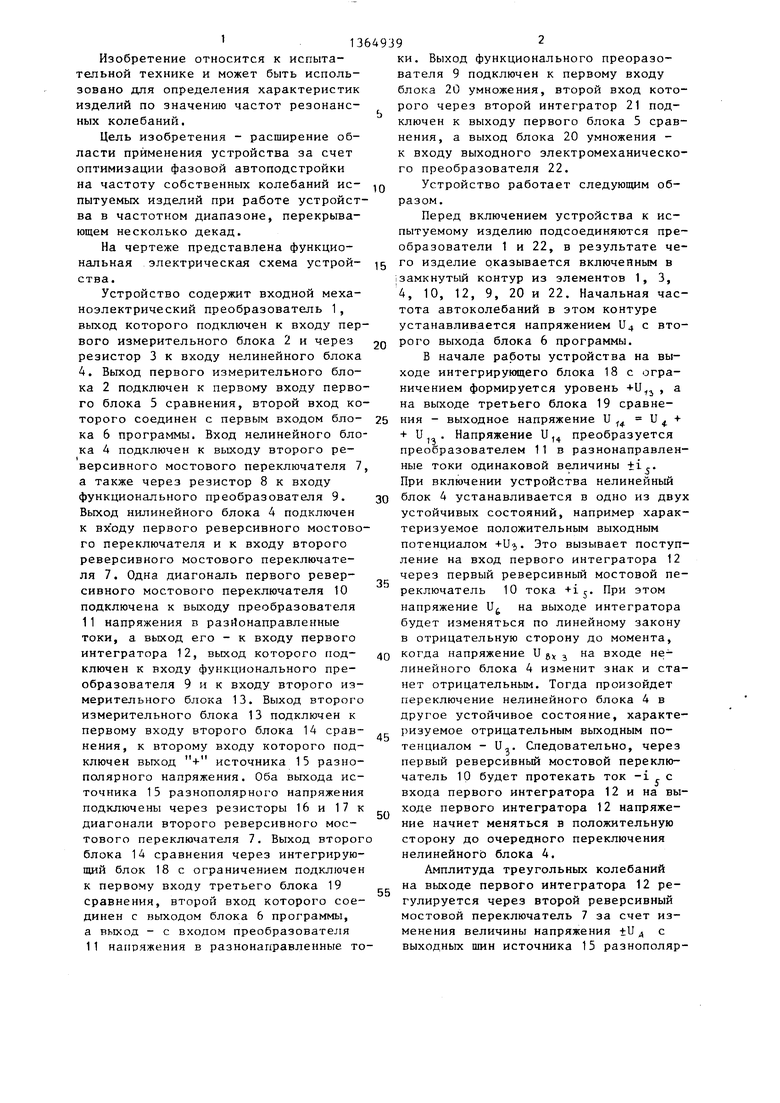
Изобретение относится к испытательной технике и может быть использовано для определения характеристик изделий по значениям частот резонансных колебаний. Целью изобретения является расширение области применения устройства за счет оптимизации фазовой автоподстройки на частоту собственных колебаний испытуемых изделий при работе устройства в частотном диапазоне, перекрывающем несколько декад. Цель достигается тем, что в устройство, содержащее входной 1 и выходной 22 преобразователи, нелинейный блок 4, первый реверсивный переключатель 10, преобразователь 11 напряжения в разнонаправленные токи, два интегратора 12 и 21, блок 6 программы и блок 5 сравнения, введены второй измерительный блок 13, второй и третий блоки 14 и 19 сравнения, интегрирующий блок 18 с ограничением, функциональный преобразователь 9 и второй реверсивный переключатель 7, 1 ил. (Л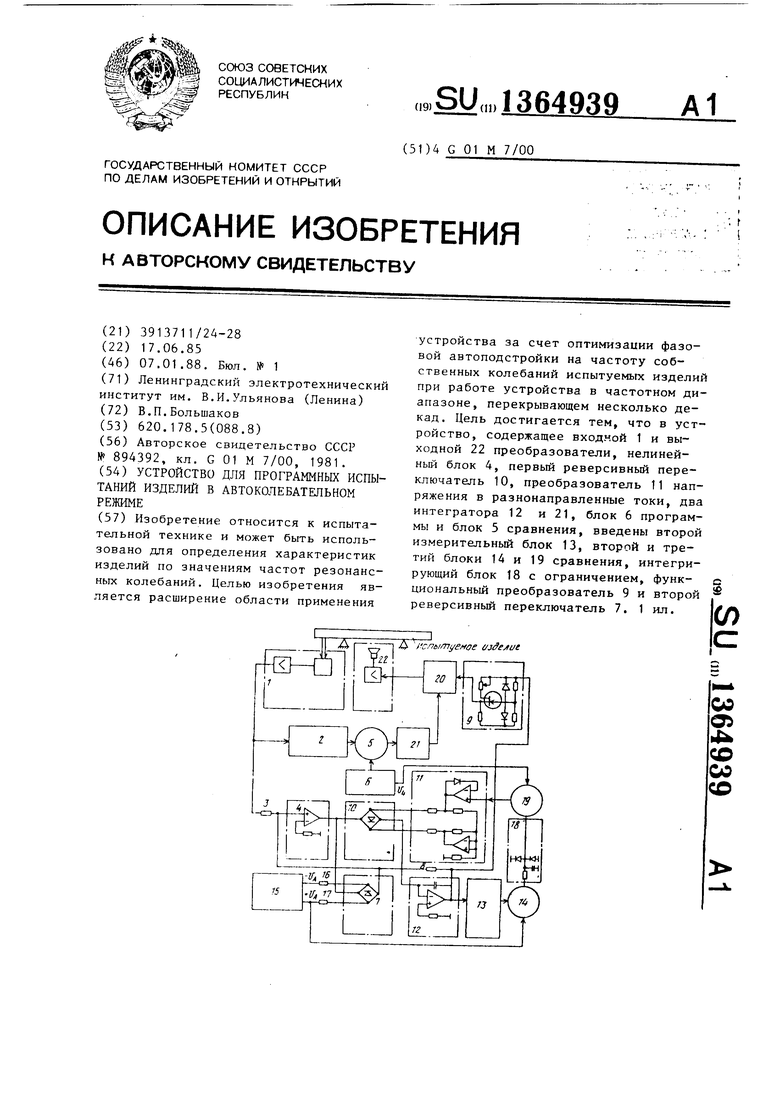
| Устройство для программных испытаний изделий в автоколебательном режиме | 1980 |
|
SU894392A1 |
