Mcntimytftea изделие
S
(Л С
4i.
СО
;о
ий
00
работы устройства с вибродатчиками любого типа. Поставленная цель достигается путем обеспечения баланса фаз в автоколебательном контуре, а также компенсированием фазовых искажений, вносимых входньм механоэлектри- еским и выходным электромеханическим преобразователями. Настройка на частоту собственных колебаний ис- пытуемог о изделия происходит за счет автоматического поддержания заданн ой амплитуды колебаний на выходе первого интегратора 7, входящего в автоколебательный контур, включающий испытуемое изделие. Электрическим сигналом, поступающим на вход второго преобразователя 21 напряжения в разнонаправленные токи, регулируется фазовый
сдвиг между сигналами с выходов первого 7 и третьего 23 интеграторов. Так как сигнал треугольной формы преобразуется с помощью функционального преобразователя 14 в синусоидальный сигнал, прикладываемый через блок 13 умножения и вькодной электромеханический преобразователь 1 к испытуемому изделию, то регулировка фазового сдвига между сигналами обеспечивает возможность проводить программные испытания изделий с использованием вибродатчиков любого типа и при необходимости компенсировать фазовые искажения, вносимые входным механоэлектрическим 2 и выходным электромеханическим 1 преобразователями . 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программных испытаний изделий в автоколебательном режиме | 1985 |
|
SU1364939A1 |
| Устройство для неразрушающего контроля изделий по уходу резонансной частоты | 1985 |
|
SU1359693A1 |
| Устройство для программных испытаний изделий в автоколебательном режиме | 1984 |
|
SU1245909A1 |
| Устройство для программных испытаний изделий в автоколебательном режиме | 1986 |
|
SU1402821A1 |
| Устройство для программных испытаний изделий в автоколебательном режиме | 1985 |
|
SU1359694A1 |
| Устройство для испытаний изделий на резонансной частоте | 1983 |
|
SU1158882A1 |
| Устройство для испытания изделий в автоколебательном режиме | 1983 |
|
SU1138659A1 |
| Функциональный генератор с синхронизацией частоты | 1988 |
|
SU1541637A2 |
| Устройство для программных испытаний изделий в автоколебательном режиме | 1980 |
|
SU894392A1 |
| Многофункциональный генератор | 1981 |
|
SU966883A1 |

Изобретение относится к испытательной технике и может быть использовано для контроля качества или определения характеристик изделий по значениям частот их резонансных колебаний Целью изобретения является расширение эксплуатационных возможностей путем обеспечения возможности
1
Изобретение относится к испытательной технике и может быть использовано для контроля качества или опрб:деления характеристик изде- ЛИЙ по, 1начениям частот их резонансных колебаний.
Цель изобретения - расширение эк- С1г:1уатационных возможностей путем об|гспече:ния возможности работы уст- ройства с вибродатчиками любого типа
Поста.вленная цель достигается путем обеспечения баланса фаз в авто- колебательном контуре в том случае, когда входной механоэлектрический преобразователь измеряет скорость испытуемого изделия, а также регулированием фазового сдвига между сигналами с выходов первого и третьего интеграторов, что позволяет компен- сировать фазовые искажения, вносимьле )зходным механоэлектрическим и выходным электромеханическим преобразователями о
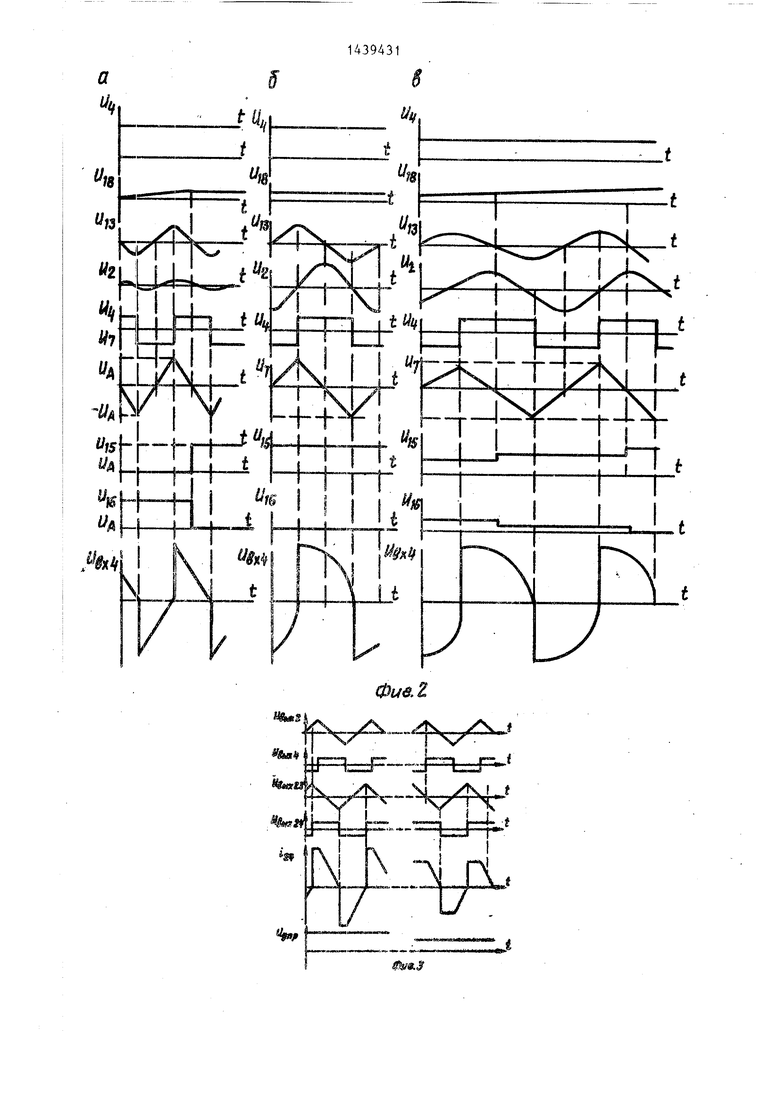
На фиг.1 представлена функциональ ная электрическая схема устройства;; на фиг о 2 - временные диаграммы, поясняющие процессы настройки на резонансные частоты; на фиг.З - временные диаграммы, иллюстрирующие регу- лировку фазового сдвига; на фиг.4 - временные диаграммы, иллюстрирующие регулировку амплитуды испытательного сигнала.
Устройство для программных испытаний изделий в автоколебательном режиме содержит выходной электромеханический преобразователь 1, входной механоэлектрический преобразователь 2, первый масштабный резистор 3, первый нелинейный блок 4 с релейной характеристикой, первый реверсивный мостовой переключатель 5,- у которого одна диагональ подключена к выходу первого преобразователя 6 напряжения в разнонаправленные токи, первый интегратор 7, второй масштаб- ньй резистор 8, первый измерительный блок 9, первый блок 10 сравнения, к второму входу которого подключен перл вый выход блока 11 программы, второй интегратор 12, блок 13 умножения, функциональный преобразователь 14 треугольного напряжения в синусоидальное, второй измерительный блок 15, второй блок 16 сравнения, второй вход которого соединен с шиной источника 17 опорного напряжения j, интегрирующий элемент 18 с ограничением, третий блок 19 сравнения, второй реверсивный мостовой переключатель 20, второй преобразователь 21 напряжения в разнонаправленные токи, третий реверсивный мостовой переключатель 22, третий интегратор 23 второй нелинейньй блок 24, третий 25 и четвертый 26 масщтабные резисторы, двухпозиционныи переключатель 27 и пятый масштабный резистор 28.
Устройство работает следующим образом.
Перед включением устройства к испытуемому изделию подсоединяются преобразователи 1 и 2, в результате чего при сооветственном положении переключателя 27 (фиг.1) изделие ока-; зывается включенным в замкнутый контур, образованный входным механоэлек- трическим преобразователем 2, первым масштабным резистором 3, первым нелинейным блоком 4 с релейной характеристикой, первым реверсивным мостовым переключателем 5, первым интегратором 7, двухпозиционным переключателем 27, функциональным преобразователем 14 треугольного напряжения в синусоидальное, блоком 13 умножения, выходным электромеханическим преобразователем 1. Начальная частота автоколебаний в этом контуре устанавливается напряжением U с второго выхода блока 11 программы. В начале работч устройства на выходе интегрирующего элемента 18 с ограничением формируется уровень U,g , а на выходе третьего блока 19 сравнения - выходное напряжение U,q + . Напряжение U,g преобразуется преобразовалинейного блока 4, Амплитуда треугольных колебаний на выходе первого интегратора 7 определяется величиной порога срабатывания первого нелинейного блока 4, который за счет положительной обратной связи через масштабные резисторы 8 и 28 имеет ги- стерезисную релейную характеристику с порогами срабатывания + Цд. Второй измерительный блок 15 преобразует напряжение U в сигнал положительной полярности и(5, величина которого равна амплитуде треугольного сигнала. Поэтому по прошествию периода колебаний сигнал на выходе второго блока
10
15
20
25
30
телем 6 в разнонаправленные токи одинаковой величины ±1б. При включении устройства нелинейный блок 4
устанавливается в одно из двух устой- ется регулировка величины перепадов чивых состояний, например, характе- тока ie,X2.4 входе второго нелинейсравнения и , Цд - и,5 оказывается равным нулю (фиг.2а).
За счет связи через резистор 25 автоколебательный контур, состоящий из третьего интегратора 23, второго нелинейного блока 24, третьего реверсивного мостового переключателя 22 оказывается в режиме вынужденных колебаний, частота которых определяется частотой автоколебаний в контуре, содержащем испытуемое изделие. Посредством изменения уровня управляющего напряжения Uupp, на входе второго преобразователя 21 напряжения в разнонаправленные токи регулируются величины токов, поступающих через второй реверсивный мостовой переключатель 20 на вход второго нелинейного блока 24. В результате осуществляного блока 24 и как следствие - регулировка фазового сдвига между треугольными сигналами на выходах первого и третьего интеграторов (фиг.З). Б частности, возможна установка фазового сдвига, равного по величине /2. Поэтому испытуемое изделие будет возбуждаться сигналом синусо- идальной формы U , который получается из треугольного сигнала с выхода первого 7 или третьего 23 интегратора.
ризуемое положительньм выходным потенциалом -1)4. Это вызывает поступление на вход первого интегратора 7 через первый реверсивный мостовой переключатель 5 тока ig- При этом напряжение и на выходе интегратора будет изменяться по линейному закону в отрицательную сторону до момента, когда напряжение Ug-n на входе первого нелинейного блока 4 изменит знак и станет отрицательным. Тогда произойдет переключение первого нелинейного блока 4. в другое устойчивое состояние, характеризуемое отрицательным выходным потенциалом -U..
Следовательно, через первый реверсивный мостовой переключатель 5 будет протекать ток -i к входу первого интегратора 7 и на выходе первого интегратора 7 напряжение начнет изменяться в положительную сторону до очередного переключения первого не94314
линейного блока 4, Амплитуда треугольных колебаний на выходе первого интегратора 7 определяется величиной порога срабатывания первого нелинейного блока 4, который за счет положительной обратной связи через масштабные резисторы 8 и 28 имеет ги- стерезисную релейную характеристику с порогами срабатывания + Цд. Второй измерительный блок 15 преобразует напряжение U в сигнал положительной полярности и(5, величина которого равна амплитуде треугольного сигнала. Поэтому по прошествию периода колебаний сигнал на выходе второго блока
10
15
ется регулировка величины перепадов тока ie,X2.4 входе второго нелинейсравнения и , Цд - и,5 оказывается равным нулю (фиг.2а).
За счет связи через резистор 25 автоколебательный контур, состоящий из третьего интегратора 23, второго нелинейного блока 24, третьего реверсивного мостового переключателя 22 оказывается в режиме вынужденных колебаний, частота которых определяется частотой автоколебаний в контуре, содержащем испытуемое изделие. Посредством изменения уровня управляющего напряжения Uupp, на входе второго преобразователя 21 напряжения в разнонаправленные токи регулируются величины токов, поступающих через второй реверсивный мостовой переключатель 20 на вход второго нелинейного блока 24. В результате осуществляется регулировка величины перепадов тока ie,X2.4 входе второго нелиней
ного блока 24 и как следствие - регулировка фазового сдвига между треугольными сигналами на выходах первого и третьего интеграторов (фиг.З). Б частности, возможна установка фазового сдвига, равного по величине /2. Поэтому испытуемое изделие будет возбуждаться сигналом синусо- идальной формы U , который получается из треугольного сигнала с выхода первого 7 или третьего 23 интегратора.
Сигнал синусоидальной формы через блок 13 умножения прикладывается к входу выходного, электромеханического преобразователя 1. По мере раскачки изделия увеличивается амплитуда сигнала с выхода входного механоэлек- трического преобразователя 2. Этот сигнал через первый масштабный резистор 3 прикладывается к входу первого нелинейного блока 4, В автоколе
51
бательнс1М контуре возможны три случая уста.новлеиия частоты автоколебаний, которая равня собственной частоте испытуемого изделия,
В первом случае напряжением LI4 задаются такие величины токов tig, поступающих через первый реверсивный мостовой переключатель 5 на.вход первого интегратора 7, что амплитуда треугольного сигнала равна заданной
величине U при любой амплитуде сигнала 11,2 с выхода входного механо- электрического преобразователя 2, При этом фазовый сдвиг между сигналами и (3 I l равен 1Г/2 (фиг..2б), что характерно для автоколебаний с частотой собственных колебаний испытуемого изделия, когда входной механо- электрический преобразователь 2 работает в р1гжиме акселерометра.
Во втором случае напряжением U задаются такие величины токов ii., поступающих через первый реверсивный мостовой переключатель 5 на вход первого интегратора 7, что амплитуда треугольного сигнала в переходном процессе оказывается меньше заданной I величины ид при любой амплитуде сиг- I нала и с выхода входного механо- 1 электриче:ского преобразователя 2 (фиг.2в)„ При этом фазовый сдвиг i между сигналами U / и U оказывается , что характерно дл автоколебаний с частотой ниже частоты собственных колебаний испытуемого : изделия, когда входной механоэл.ек- трический преобразователь 2 рабога- Iет в режиме акселерометра. В резупь- |татг измефения амплитуды сигнала U I вторым иг;мерительным блоком 15 и I сравнения: его выходного сигнала с задаваемым уровнем U, на выходе второго блока 16 сравнения формируется сигнал U нал и
16
и,5. Этот сигМб приложенный к входу интегрирующего элемента 18 с ограничением, вызывает увеличение уровня напряжения на его выходе. Поэтому нарастают сигнал , и ц. -ь , приложенный к входу первого преобразователя 6 напряжения в разнонаправленные токиа а следовательно., и крутизна изменяющегося напряжения на выходе первого интегратора 7, Как следствие увеличивается частота автоколебаний в контуре до момента, когда амплитуда И- не достигнет установленного значения Од.
Третий случай установления частоты агзтоколебаний возможен, если в переходном гфоцессе амплитуда сигнала на выходе первого интегратора 7 превышает установленное значение Од, При этом фазовый сдвиг между сигналами U i оказывается боль
0
5
0
5
0
Б
0
ше Т/2, что характерно для автоколебаний с частотой вьше частоты собственных колебаний испытуемого изделия, когда входной механоэлектриче- ский преобразователь 2 работает в режиме акселерометра.Последующий про5 цесс настройки амплитуды колебаний и, а следовательно, и частоты автоколебаний аналогичен описанному для второго случая,
Регулирование амплитуды нагруже- ния испытуемого изделия в соответствии с программой осуществляется после настройки на частоту собственных колебаний с помощью канала регулировки уровня возбуждения. Для этого измеряется амплитуда сигнала с выхода входного механоэлектрическо- го преобразователя 2 с помощью первого измерительного блока 9. Выходной уровень напряжения Ue,,;, (фиг.4) с выхода первого измерительного блока 9 срав ивается с помощью первого блока 10 сравнения с сигналом с первого выхода блока 11 программы. На выходе первого блока 10 сравнения фор- Ivшpyeтcя сигнал рассогласования, если уровень колебаний испытуемого изделия не соответствует заданному на данной ступени нагружения. Этот сигнал рассогласования, прикладываемый к входу второго интегратора 12, вызывает изменение выходного напряжения на его выходе и, следовательно, изменение коэффициента передачи блока 13 умножения до момента, когда сигналы с первого выхода блока 11 программы и выхода первого измерительного блока 9 не окажутся равными по величине. Переход к следующей ступени нагружения осуществляется за счет изменения величины напряжения на первом выходе блока 11 программы.
Таким образом, настройка на частоту собственных колебаний испытуемого изделия происходит за счет автоматического поддержания заданной амплиту ды колебаний на выходе первого интегратора 7, входящего в автоколебательный контур, включающий испытуемое изделие. Электрическим сигналом, по
ступающим на вход второго преобразователя 21 напряжения в разнонаправленные токи, регулируется фазовый сдвиг между сигналами с выходов первого 7 и третьего-23 интеграторов. Так как сигнал треугольной формы постоянной амплитуды преобразуется с помощью функционального преобразователя 14 в синусоидальный испытательный сигнал прикладываемый через бл 13 умножения и выходной электромеханический преобразователь 1 к испытуемому изделию, то регулировка фазового сдвига между треугольными сигналами обеспечивает возможность проводить программные испытания издели с использованием вибродатчиков любо типа и при необходимости компенсировать фазовые искажения, вносимые, н пример, входным 2 и выходным 1 преоразователями. В результате оказывается возможным проводить прецизионн испытания сложных инженерных конструкций в расширенном частотном диапазоне с вибродатчиками любого типа что расширяет эксплуатационные воз- можности системы. Формула изобретени
Устройство для программных испытаний изделий в автоколебательном режиме, содержащее выходной электромеханический преобразователь соединенные последовательно входной меха ноэлектрический преобразователь,первый масштабный резистор,нелинейный блок, первый реверсивный мостовой переключатель, у которого одна диагональ подключена к первой паре выходов первого преобразователя напряжения в разнонаправленные токи, и первый интегратор, выход которого через второй масштабный резистор соединен с входом первого нелинейного элемента, канал регулировки уровня возбуждения, включающий последовательно соединенные первый измерительный блок, подключенный к выходу входного механоэлектрическо- го преобразователя, первый блок сравнения, к второму входу которого подключен первый выход блока .программы второй интегратор и блок умножения, включенный между входом выходного
механоэлектрического преобразовате
ля и выходом функционального преобра
0
15
25
n
5
0
35
0
5
0
зователя треугольного напряжения в синусоидальное, канал стабилизации амплитуды треугольного сигнала,включающий поеледовательно соединенные второй измерительный блок, вход которого подключен к выходу первого ин- TerpaTopaj второй блок сравнения, второй вход которого соединен с шиной источника оперного напряжения, интегрирующий элемент с ограничением и третий блок сравнения, у которого выход подключен к входу первого преобразователя напряжения в разнонаправленные токи, а второй вход соединен с вторым выходом блока программы, а также второй реверсивный мостовой переключатель, о т л и ч а- ю щ е е с я тем, что, с целью расширения эксплутационньгх возможностей путем обеспечения возможности работы устройства с вибродатчиками любого типа, в него введены второй преобразователь напряжения в разнонаправленные токи, выход которого соединен с первой диагональю второго реверсивного мостового переключателя, а вход - с шиной источника управляющего напряжения, третий реверсивный мостовой переключатель, у которого одна диагональ подключена к второй паре выходов первого преобразователя напряжения в разионаправленггые токи, третий интегратор, вход которого соединен с выxoдo третьего реверсивного мостового переключателя, второй нелинейный блок, выход которого подключен к управляющим входам второго и третьего мостовых реверсивных переключателей, а вход соединен с выходом второго реверсивного переключателя непосредственно через третий масштабньй резистор с выходом первого интегратора и через четвер- тый масштабный резистор с выходом третьего интегратора, а также двух- позиционный переключатель, общий контакт которого соединен с входом функционального преобразователя треугольного напряжения в синусоидальное, а коммутируемые контакты подключены к выходам первого и третьего интеграторов, и пятый масштабный резистор, включенный между.входом и выходом первого нелинейного
.
feCbv-,Z.%я«
fv-v
I-Н-г.
0ue.lf
| Устройство для программных испытаний изделий в автоколебательном режиме | 1985 |
|
SU1364939A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
