со
05
00
О5 ел
О5
113
Изобретение относится к фотометрии и может быть использовано в астрономии, а также в других областях науки и техники, где требуется регистрация изображений с пространственным разрешением, превышающим разрешающую способность отдельных светочувствительных ячеек приемника.
Цель изобретения - повышение пространственной разрешающей способности измерений.
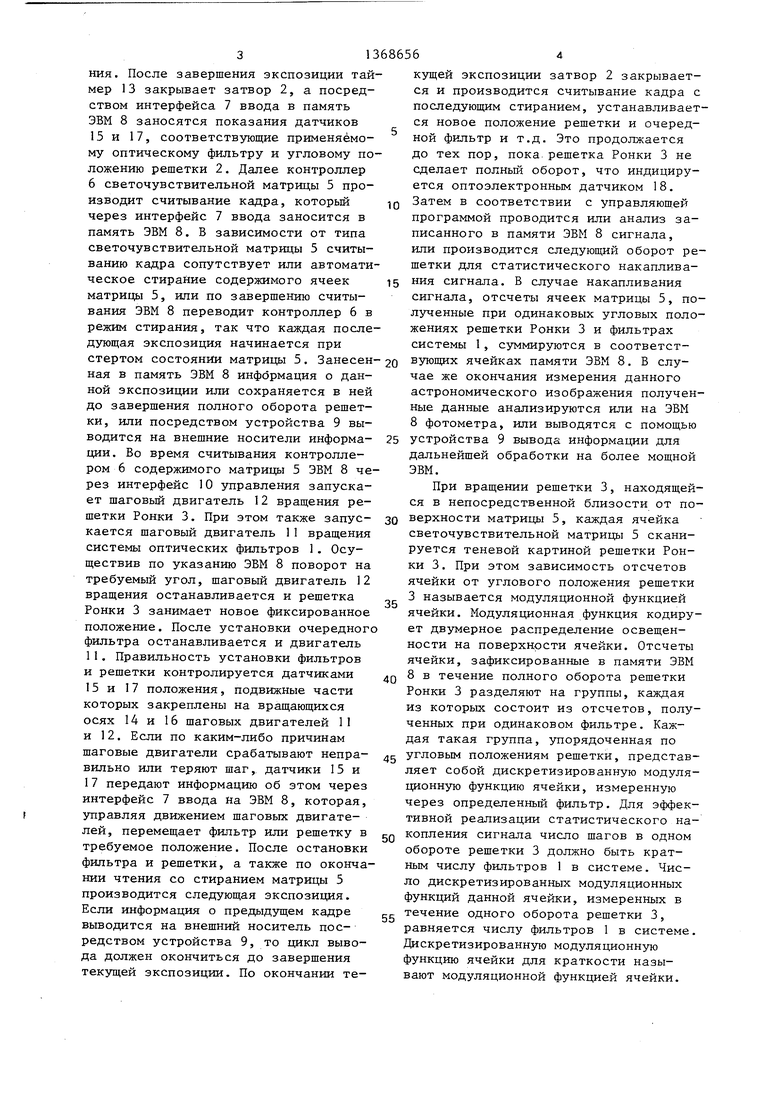
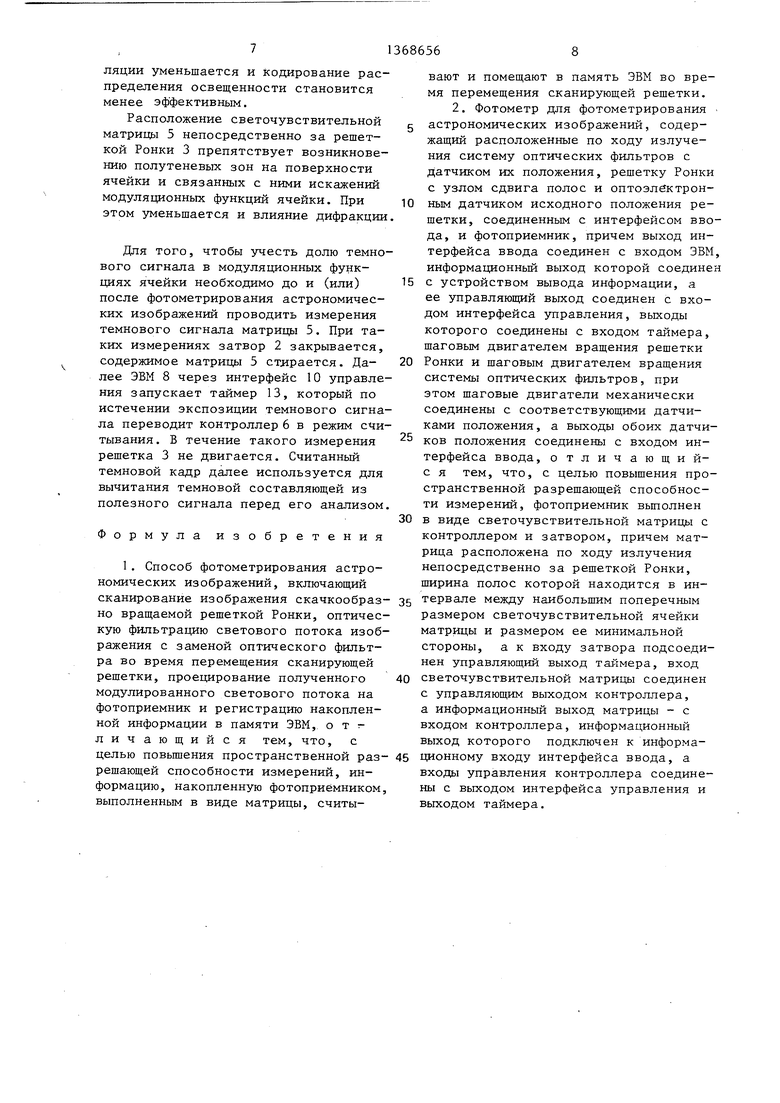
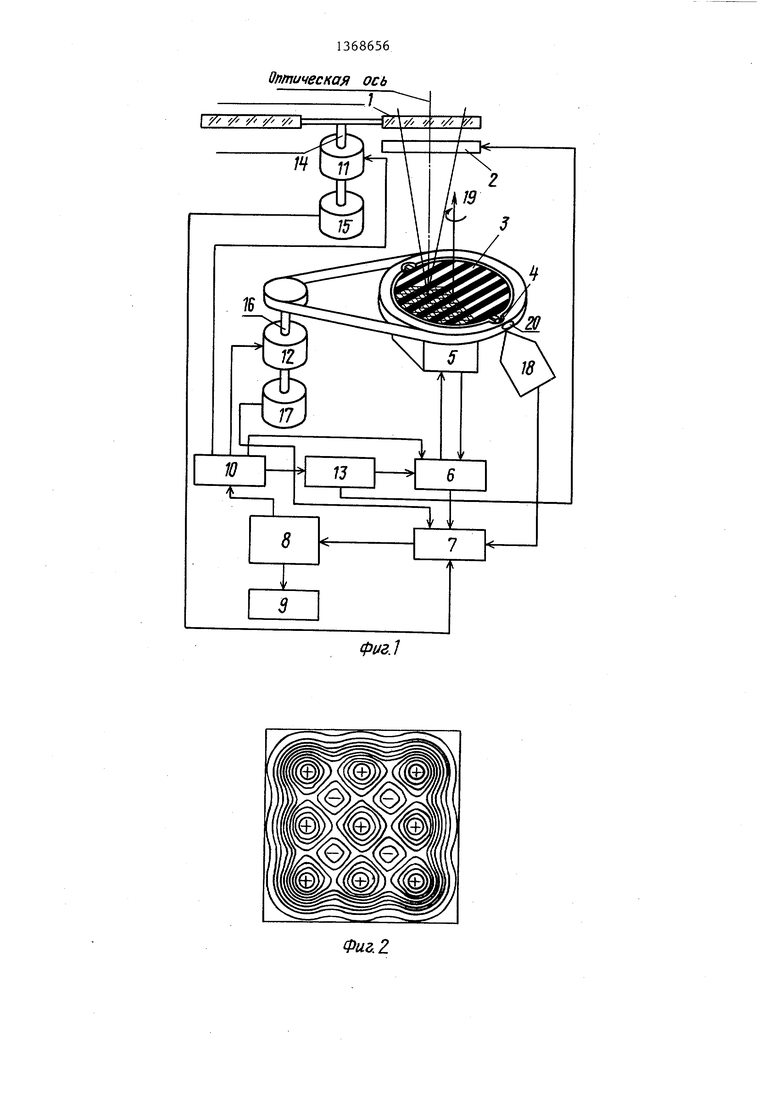
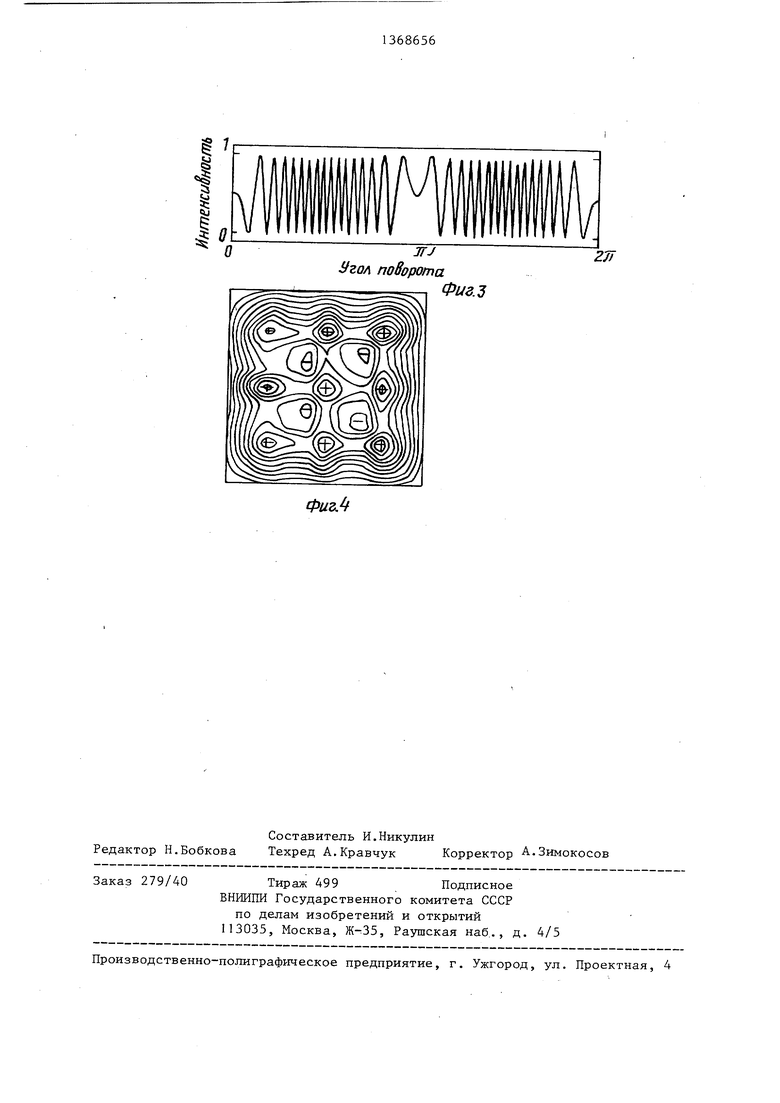
На фиг.1 представлена функциональная блок-схема фотометра астрономических изображений со сканируемой матрицей, реализующего предлагаемый способ фотометрирования; на фиг.2 - двумерное распределение освещенности на поверхности ячейки светочувствительной матрицы; на фиг.З - антисимметричная модуляционная функция ячейки при двумерном распределении освещенности (число угловых положений в обороте решетки равно 256, соотношение сигнал/шум равно 500); на фиг.4- восстановленное методом максимальной энтропии распределение освещенности на поверхности ячейки (размер суб- ячейки 1/11 ширины ячейки, максимумы
5
Фотометр при осуществлении предлагаемого способа работает следуюш 1м образом.
Все выполняемые фотометром функции определяются управляющей программой, которая введена в память ЭВМ 8. В начале работы фотометр приводится в исходное состояние. При этом ЭВМ 8
0 посредством интерфейса 10 управления включает шаговый двигатель 12 вращения решетки Ронки 3, находящейся в фокальной плоскости телескопа. Решетку вращают до тех пор, пока оптоэлек5 тронный датчик 18 не выработает признак ее начального положения. После остановки решетки 3 в исходном положении оптозлектронный датчик 18 через интерфейс 7 ввода передает соответствующий сигнал на ЭВМ 8. ЭВМ 8 посредством интерфейса 10 управления включает шаговый двигатель 11, который устанавливает заданный фильтр из системы оптических фильтров 1. Правильность установки фильтра индицируется датчиком 15 положения, который через интерфейс 7 ввода передает эту информацию на ЭВМ 8. При закрытом затворе 2 ЭВМ 8 посредством ин0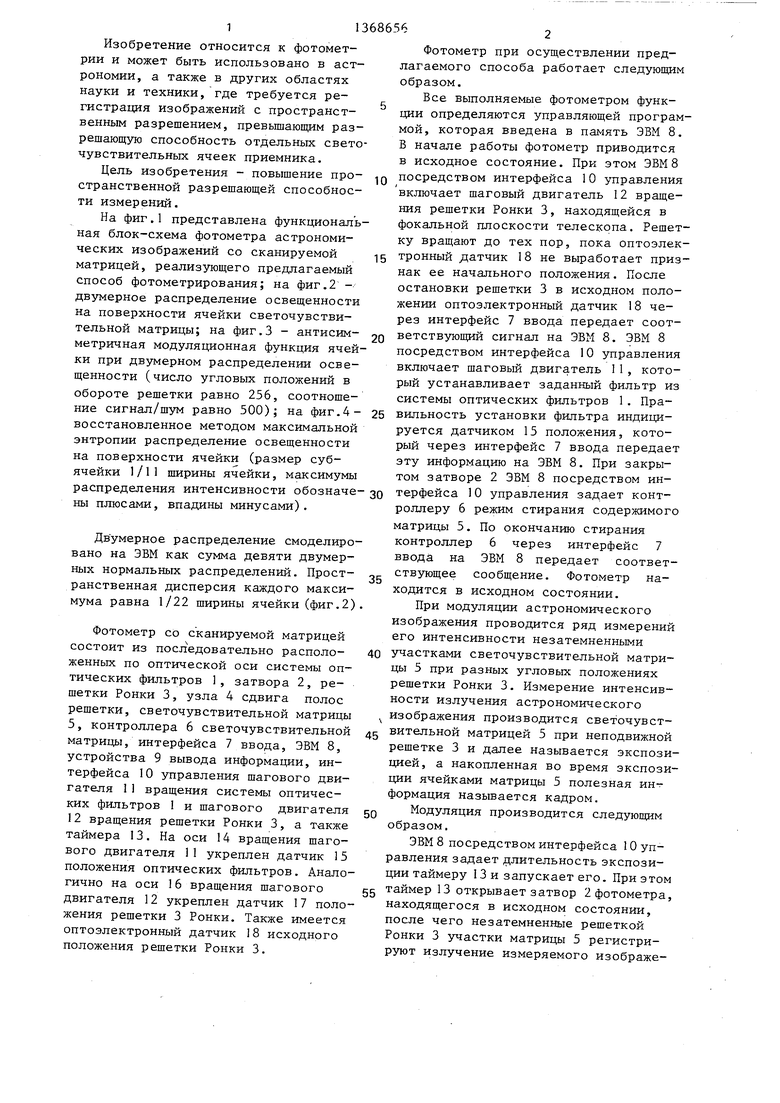

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фотометрирования звездного поля и мультиплексирующий сканирующий фотометр для его осуществления | 1985 |
|
SU1257414A1 |
| СПОСОБ РЕГИСТРАЦИИ СПЕКТРА ПРОСТРАНСТВЕННЫХ ЧАСТОТ ДВУМЕРНОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1996 |
|
RU2107923C1 |
| Устройство для морфологического анализа мазков крови | 2021 |
|
RU2763667C1 |
| Устройство автоматического получения и обработки изображений | 2019 |
|
RU2707714C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В УСТРОЙСТВО С ПАМЯТЬЮ И ОБРАБОТКИ ВВОДИМОЙ ИНФОРМАЦИИ | 1994 |
|
RU2095851C1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ЗНАЧЕНИЙ ПО ИЗОБРАЖЕНИЯМ | 2020 |
|
RU2825348C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЦВЕТА ПОВЕРХНОСТИ И ИЗМЕРИТЕЛЬ ЦВЕТА ПОВЕРХНОСТИ | 2004 |
|
RU2288453C2 |
| УСТРОЙСТВО КОГЕРЕНТНОЙ ОПТИЧЕСКОЙ ФИЛЬТРАЦИИ | 1971 |
|
SU297058A1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПАРАМЕТРОВ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ, ДОЛГОВРЕМЕННЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ И СИСТЕМА ВИЗУАЛИЗАЦИИ СО СТРУКТУРИРОВАННЫМ ОСВЕЩЕНИЕМ | 2019 |
|
RU2824337C1 |
Изобретение относится к фотометрии и может быть использовано в астрономии и других областях науки и техники. Цель изобретения - выделять в фотометрируемых астрономических изображениях детали более мелкие, чем размер светочувствительной ячейки (СЯ) матрицы, применяемой для регистрации изображения. Повышение разрешающей способности достигается путем шагообразного враш;ения решетки Ронки (РР) перед двумерной матрицей, состоящей из СЯ. При этом измерения проводятся при неподвижной РР в интервалах между ее скачками. Зависимость числа отсчетов СЯ от углового положения РР является модуляционной функцией ячейки, которая кодирует двумерное распределение освещенности на поверхности СЯ. Б результате деконво- люции методом максимальной энтропии из модуляционной функции ячейки восстанавливают распределение интенсивности на поверхности СЯ. Фотометриро- вание изображения в разных цветах производится при помощи системы оптических фильтров, которые заменяются во время перемещения РР. 2 с.п. ф-лы, 4 ил. (Л
распределения интенсивности обозначе- зо терфейса 10 управления задает конт- ны плюсами, впадины минусами).
роллеру 6 режим стирания содержимого матрицы 5. По окончанию стирания контроллер 6 через интерфейс 7 ввода на ЭВМ 8 передает соответствующее сообщение. Фотометр находится в исходном состоянии.
Двумерное распределение смоделировано на ЭВМ как сумма девяти двумерных нормальных распределений. Пространственная дисперсия каждого максимума равна 1/22 ширины ячейки (фиг.2)
Фотометр со сканируемой матрицей состоит из посл едовательно расположенных по оптической оси системы оптических фильтров 1, затвора 2, решетки Ронки 3, узла 4 сдвига полос решетки, светочувствительной матрицы 5, контроллера 6 светочувствительной матрицы, интерфейса 7 ввода, ЭВМ 8, устройства 9 вывода информации, интерфейса IО управления шагового двигателя 11 вращения системы оптических фильтров I и шагового двигателя 12 вращения решетки Ронки 3, а также таймера 13. На оси 14 вращения шагового двигателя 11 укреплен датчик 15 положения оптических фильтров. Аналогично на оси 16 вращения шагового двигателя 12 укреплен датчик 17 положения решетки 3 Ронки. Также имеется оптоэлектронный датчик 18 исходного положения решетки Ронки 3.
терфейса 10 управления задает конт-
роллеру 6 режим стирания содержимого матрицы 5. По окончанию стирания контроллер 6 через интерфейс 7 ввода на ЭВМ 8 передает соответствующее сообщение. Фотометр находится в исходном состоянии.
При модуляции астрономического изображения проводится ряд измерений его интенсивности незатемненными участками светочувствительной матрицы 5 при разных угловых положениях решетки Ронки 3. Измерение интенсивности излучения астрономического изображения производится светочувст- вительной матрицей 5 при неподвижной решетке 3 и далее называется экспозицией, а накопленная во время экспозиции ячейками матрицы 5 полезная инт формация называется кадром.
Модуляция производится следующим образом.
ЭВМ 8 посредством интерфейса 10 управления задает длительность экспозиции таймеру 13 и запускает его. При этом таймер 13 открывает затвор 2 фотометра, находящегося в исходном состоянии, после чего незатемненные решеткой Ронки 3 участки матрицы 5 регистрируют излучение измеряемого изображе
ния. После завершения экспозиции таймер 13 закрывает затвор 2, а посредством интерфейса 7 ввода в память ЭВМ 8 заносятся показания датчиков 15 и 17, соответствзпощие применяемому оптическому фильтру и угловому положению решетки 2. Далее контроллер 6 светочувствительной матрицы 5 производит считывание кадра, который через интерфейс 7 ввода заносится в память ЭВМ 8. В зависимости от типа светочувствительной матрицы 5 считыванию кадра сопутствует или автоматическое стирание содержимого ячеек матрицы 5, или по завершению считывания ЭВМ 8 переводит контроллер 6 в режим стирания, так что каждая последующая экспозиция начинается при
стертом состоянии матрицы 5. Занесен-20 взпощих ячейках памяти ЭВМ 8. В слуная в память ЭВМ 8 информация о данной экспозиции или сохраняется в ней до завершения полного оборота решетки, или посредством устройства 9 выводится на внешние носители информации. Во время считывания контроллером 6 содержимого матрицы 5 ЭВМ 8 через интерфейс 10 управления запускает шаговый двигатель 12 вращения решетки Ронки 3. При этом также запускается шаговый двигатель 11 вращения системы оптических фильтров 1, Осуществив по указанию ЭВМ 8 поворот на требуемый угол, шаговый двигатель 12 вращения останавливается и решетка Ронки 3 занимает новое фиксированное положение. После установки очередног фильтра останавливается и двигатель 1 1. Правильность установки фильтров и решетки контролируется датчиками 15 и 17 положения, подвижные части которых закреплены на вращающихся осях 14 и 16 шаговых двигателей 11 и 12. Если по каким-либо причинам шаговые двигатели срабатывают неправильно или теряют шаг, датчики 15 и 17 передают информацию об этом через интерфейс 7 ввода на ЭВМ 8, которая, управляя движением шаговых двигателей, перемещает фильтр или решетку в требуемое положение. После остановки фильтра и решетки, а также по окончании чтения со стиранием матрицы 5 производится следующая экспозиция. Если информация о предыдущем кадре выводится на внешний носитель посредством устройства 9, то цикл вывода должен окончиться до завершения текущей экспозиции. По окончании те
кущей экспозиции затвор 2 закрывается и производится считывание кадра с последующим стиранием, устанавливается новое положение решетки и очередной фильтр и т.д. Это продолжается до тех пор, пока.решетка Ронки 3 не сделает полный оборот, что индицируется оптоэлектронным датчиком 18. Затем в соответствии с управляюш.ей программой проводится или анализ записанного в памяти ЭВМ 8 сигнала, или производится следующий оборот решетки для статистического накапливания сигнала. В случае накапливания сигнала, отсчеты ячеек матрицы 5, полученные при одинаковых угловых положениях решетки Ронки 3 и фильтрах системы I, сзтммируются в соответст5
0
5
чае же окончания измерения данного астрономического изображения полученные данные анализируются или на ЭВМ 8 фотометра, или выводятся с помощью устройства 9 вывода информации для дальнейшей обработки на более мощной ЭВМ.
При вращении решетки 3, находящейся в непосредственной близости от поверхности матрицы 5, каждая ячейка светочувствительной матрицы 5 сканируется теневой картиной решетки Ронки 3. При этом зависимость отсчетов ячейки от углового положения решетки 3 называется модуляционной функцией ячейки. Модуляционная функция кодирует двумерное распределение освещенности на поверхности ячейки. Отсчеты ячейки, зафиксированные в памяти ЭВМ 8 в течение полного оборота решетки Ронки 3 разделяют на группы, каждая из которых состоит из отсчетов, полученных при одинаковом фильтре. Каждая такая группа, упорядоченная по угловым положениям решетки, представляет собой дискретизированную модуляционную функцию ячейки, измеренную через определенный фильтр. Для эффективной реализации статистического накопления сигнала число шагов в одном обороте решетки 3 должно быть кратным числу фильтров 1 в системе. Число дискретизированных модуляционных функций данной ячейки, измеренных в g течение одного оборота решетки 3,
равняется числу фильтров 1 в системе. Дискретизированнзто модуляционную функцию ячейки для краткости называют модуляционной функцией ячейки.
0
5
0
Для восстановления изображения, т.е. двумерного раслределения освещенности на поверхности ячейки (фиг.2), на ЭВМ производится анализ модуляционной функции этой ячейки (фиг.З). С этой целью поверхность каждой ячейки матрицы 5 математически разделяется на более мелкие квадратные участки одинаковой величины (субъячейки) и далее исследуется вклад субъячеек ячейки в модуляционную функцию ячейки. Количество выделяемых субъячеек прямо пропорционально достигнутому при измерении астрономического изображения соотношению сигнал/шум в соответствующей ячейке матрицы 5. При вращении решетки Рон- ки отсчеты каждой субъячейки модулируются. При этом зависимость отсчетов субъячейки от углового положения решетки 3 называется несущей функцией субъячейки. Ее амплитуда равняется числу отсчетов, получаемых от субъячейки при отсутствии модуляции и при данном распределении освещенности на поверхности ячейки. Модуляционная функция ячейки состоит из суммы несущих функций субъячеек, составляющих данную ячейку. При анализе модуляционной функции ячейки производится подгонка амплитуд несущих функций субъячейки к измеренной модуляционной функции методом максимальной энтропии. Полученный этим методом набор амплитуд наилучшим образом аппросимирует истинное распределение освещенности на данной ячейке (фиг.4), при этом наименьшим разрешаемым пространственным элементом является субъячейка. .Осуществив аналогичньй анализ всех модуляционных функций ячеек светочувствительной матрицы 5, получают двумерное пространственное распределение освещенности, т.е. из- меренное астрономическое изображение на фокальной плоскости телескопа с пространственным разрешением величиной в субъячейку. Так как размер субъячейки может быть значительно меньшим размера ячейки, то достигнутое пространственное разрешение можно считать сверхвысоким для данной матрицы 5, которая без модуляции моgQ исходит наибольшее количество полных покрытий - открытий ячейки темными полосками решетки. Ход модуляционно функции при покрытии - открытии ячей ки как раз и кодирует распределение
жет достигнуть в пределе пространствен освещенности на поверхности ячейки, ное разрешение измеряемого распределе- 55
поэтому в указанном случае кодирова ние является наиболее эффективным. При более мелких решетках, отсутству полные покрытия ячеек, глубина моду
ния освещенности,равное размеру ее
ячейки.
Расположение оси 1У вращения решетки Ронки 3 по отношению к полосам
5
0
решетки оказывает влияние на форму модуляционной функции ячейки. При вращении решетки Ронки 3 вокруг оси 19, проходящей через середину прозрачной полосы, получается симметричная модуляционная функция с периодом, равным половине периода оборота решетки. При установке оси вращения решетки на границе темной и прозрачной полос период несущей функции равен периоду обращения решетки и функция получается антисимметричной (фиг.З). При реальных измерениях модуляционные функции ячейки искажаются как пуассоновскими шумами, присущими световому потоку от измеряемых звезд, так и дополнительными гауссовыми шумами, возникающими вследствие звездных мерцаний и несовершенств модуляции. В случае присутствия этих шумов более точное восстановление распределения освещенности на ячейке получают в случае антисимметричных моду5 ляционных функций. Для облегчения установки оси 19 вращения решетки Ронки 3 служит узел 4 сдвига полос, в котором при помоащ микрометрического винта 20 смещают решетку в направле0 НИИ, перпендикулярном полоскам решетки. Вращая решетку Ронки 3 при равномерном освещении фокальной плоскости и регистрируя модуляционные функции ячеек при различных положениях полосок относительно оси 19 вращения, выбирают рабочим положением то, при котором порождаются антисимметричные модуляционные функции.
При модуляции к аждой ячейки матQ рицы 5 модуляционные функции ячейки содержат наибольшее количество информации о распределении освещенности ячейки при модулировании решеткой 3, ширина полос которой находится в
g интервале между наибольшим поперечным размером светочувствительной ячейки и размером ее минимальной стороны, так как в этом случае в течение одного оборота решетки 3 проQ исходит наибольшее количество полных покрытий - открытий ячейки темными полосками решетки. Ход модуляционной функции при покрытии - открытии ячейки как раз и кодирует распределение
5
освещенности на поверхности ячейки,
поэтому в указанном случае кодирование является наиболее эффективным. При более мелких решетках, отсутствуют полные покрытия ячеек, глубина модуляции уменьшается и кодирование распределения освещенности становится менее эффективным.
Расположение светочувствительной
с
матрицы Ь непосредственно за решеткой Ронки 3 препятствует возникновению полутеневых зон на поверхности ячейки и связанных с ними искажений модуляционных функций ячейки. При этом зт еньшается и влияние дифракции
Для того, чтобы учесть долю темно- вого сигнала в модуляционных функциях ячейки необходимо до и (или) после фотометрирования астрономических изображений проводить измерения темнового сигнала матрицы 5. При таких измерениях затвор 2 закрывается, содержимое матрицы 5 стирается. Да- лее ЭВМ 8 через интерфейс 10 управления запускает таймер 13, который по истечении экспозиции темнового сигнала переводит контроллер 6 в режим считывания. В течение такого измерения решетка 3 не двигается. Считанный темновой кадр далее используется для вычитания темновой составляющей из полезного сигнала перед его анализом
Формула изобретения
Фuz.Z
I I.
0
JTJ
Угол поворота
Фиг.
ZTi
Физ.З
