(54) АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ
- Изобретение относится к фотограмметри- ческому приборостроению, в часгаости к аналитическим стереообрабатьгеайнцим приборам. Известны аналитические стереофотограмметрические приборы, содержащие оптико-механическое устройство стереокомараторного типа, электронную вычислительную машину (ЭВМ), координатограф (графопостроитель) и пульт оператора.
Штурвалы X, У связаны механическими связями с наблюдательной оптической системой и с каретками снимкодержателей. Вращение штурвалов X, У передаются к двум тосрементным преобразователям угол-число-импyлtcный ход, в которых углы поворота преобразуются в импульсы, накапливаемые в счетчиках ЭВМ как координаты модели х, у, z. Значения координаты Z модели формируются аналогично.
Цифровые коды координат х, у, z точек модели вводятся в ЭВМ в программу, моделирующую решение двойной обратной фотограмметрической задачи. Результаты вычислений представляются как разности между коПРИБОР
ординатами точек модели и соответствующими координатами точек сникосов Лх, Дх2Лу,Ау2Цифровые коды этих разностей затем преобразуются в углы поворота шаговых двигателей, выходные валы которых связаны с ведущими винтами через зубчатые дифференщ1алы.
На дифференциалах осуществляется алгебраическое суммирование координат точек модели и вычисленных в ЭВМ и преобразованных в угол поворота поправок Лх, Лу1, Дха, Ayj.
В результате точки снимков, соответствующие точке модели, х, у, 2 подводятся под измерительные марки оптической системы с высокой точностью. Координаты х, у модели также передаются на координатограф (графопостроитель) .
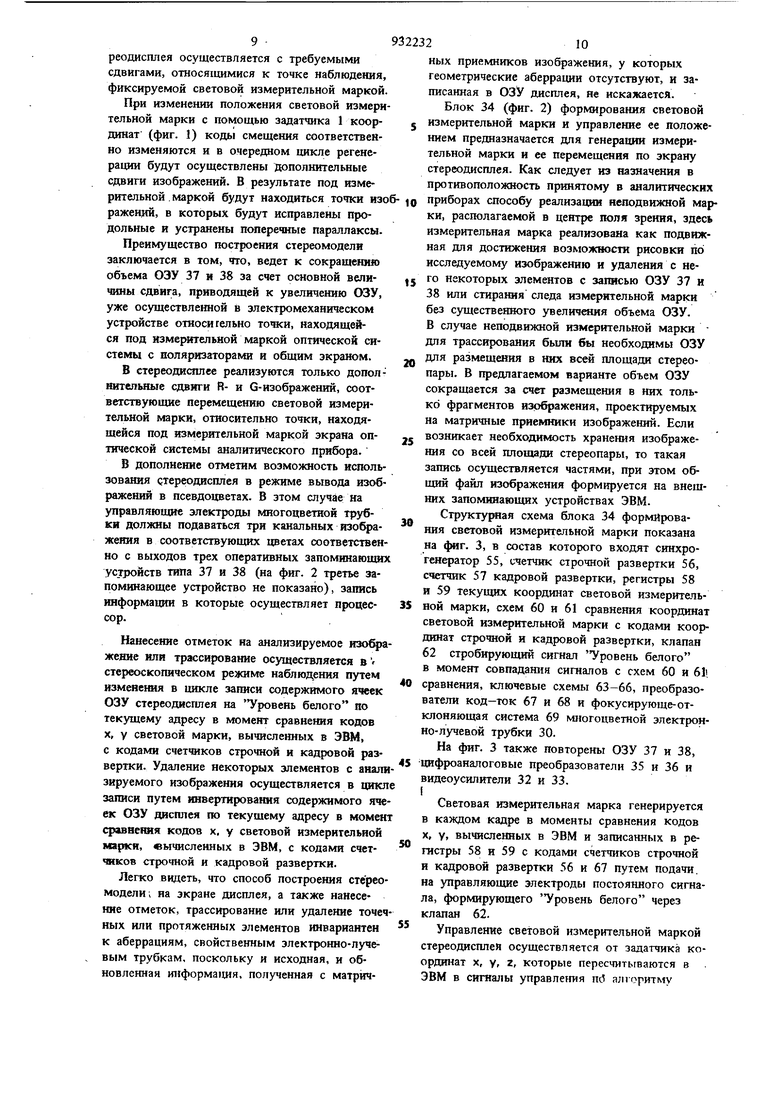
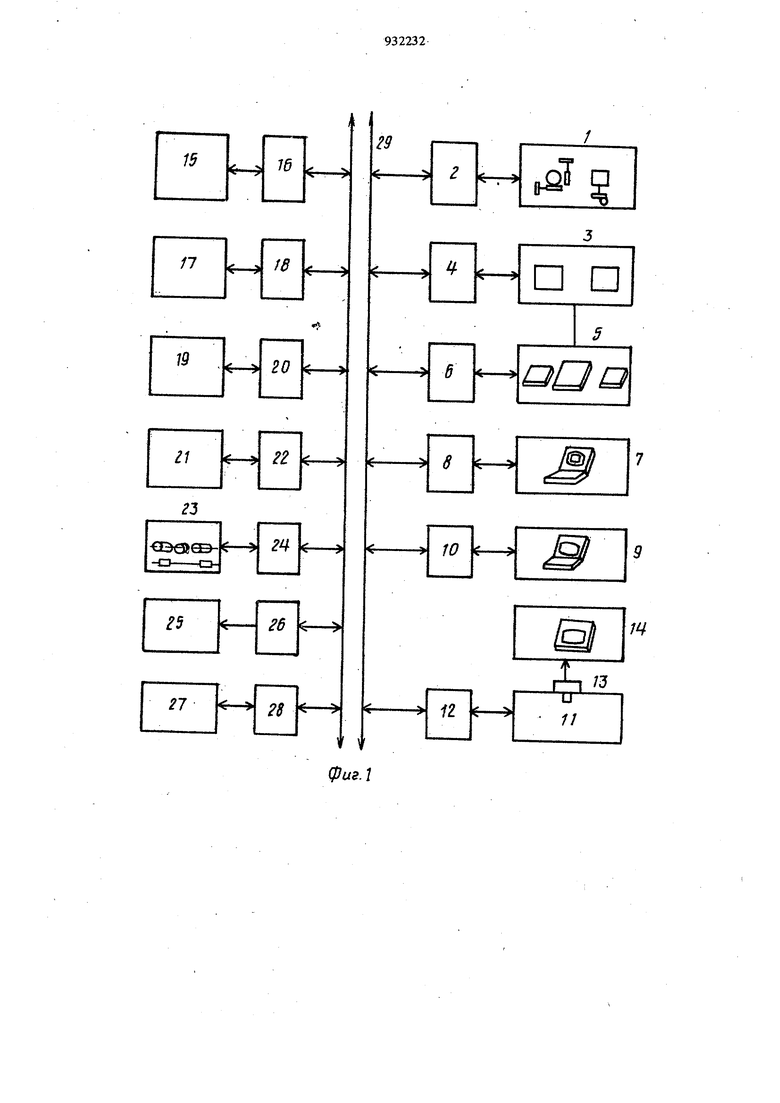
Принципиальной особенностью этих аналитических стереофотограмметрических приборов является то, что все они проектируется по стереокомпараторной схеме, т.е. офмки располагаются в каретках, находящихся в горизонтальной плоскости, приводы которых получая сигналы от электронной вычислительной маишны (ЭВМ), осуществляющей решение двои ной обратной фотограмметрической засечки в реальном масштабе времени, перемещают каретки по коордииатам х, у таким образом, что в каждый момент времени под измерительные марки .оптической наблюдательной системы под водятся Р и Р левого и правого снимка с координатами х, у и х , у , соответствующие точке Р стереомодели местности с координатами X, у, Z 1). Недостапсами этих аналитических приборов являются сложность конструкции блоков перемещения снимков и исполнительных электроприводов, требующих применения прецизионных винтов, гаек, направляющих, подшипников, что существенно ухудшает технологичность и снижает экономические и эксплуатационные характеристики приборов, а также препятствуют их широкому применению, в том числе в полевых условиях. Известен фотограмметрический прибор для расшифровки изображений, имеютций блок рас cMOTpeifflH двух стереоскот1ческих снимков и элементы для нанесения отметок с целью анализа рельефа территории или объектов. Устрой ство имеет элементы для установки копии одного из двух снимков; элементы, обеспечивающие индикацию изображения копия в зоне наблюдения; оптические проекционные элементы, работающие совместно с экраном и вос производящие изображение всей поверхности копии в зоне наблюдения. Оператор может непосредствеюто устанавливать рассматр1-шаемую зону в некотором положении относительно набора снимков {2. Недостатком этого устройства является огра ничения, возникаюидае при дешифрировании снлмков из-за невозможности удаления элемен тов изображения, например, при сгла5кивашш рельефа, эрозионной сети, сети линеаментов и др., а также при удалении элементов изображения, нанесенных оператором на предшествую щих шагах обработки и не подтвержденных на последующих шагах. Наиболее близким по структуре и достигаемому результату к предлагаемому является аналитический стереофотограмметрический прибор типа Трастер-77. содержащ ш станину, С1шмкодержатели с возможностью перемещения на воздуилюй подушке по координатам X, у и поворотам на углы х, ходовые В1тнты, электроприводы, фотоэлектрические преобразователи линейных перемещешш в число-импульсные коды, двухканальную оптическую систему с поляризаторами в каждом канале и общим экраном, задатчик координат точек стереомодели, электронную вьяислительную машину с втгешним запоминающим ус1ройствами, устройствами ввода-вывода, пульто94 вым терминалом и графопостроителем с замкнутой .телевизионной системой 3. Прибор по сравнению с аналогами более технологичен и прост по конструкции, поскольку содержит меньшее количество прецизионных деталей. Однако в устройстве отсутствуют возможности для стереоскопического нанесения отметок (и-гш трассирования протяженных элемен-тов) на анализируемое изображение стереопары, а также возможности для удаления с анализируемого изображения стереопары гочешых или протяженных элементов и документирования введенных или удаленных элементов. Отсутствуют также возможности для интерактивной фотометрической обработки изображений, что С1шжает достоверенность дешифрирования, для нанесения на дешифр фуемое изображение дополнительных условных знаков, что увеличивает трудоемкость дешифрирования. Кроме того недостатком прибора является необходимость прецизионного преобразования цифровых кодов в линейные перемещения с помощью прецизионных направляющих, винтов, гаек, подшипников и электроприводов. Цель изобретения - расширение функциональных возможностей, повышение достоверности дешифрирования изображений, обеспечение возможности нанесения да изображение дополнительных элементов или удаления элементов и сокращения о&ьема оперативной памяти стереодисплея, уменьшение трудоемкости дешифрирования путем нанесения на цешяфряруемое изображение дополнительных условных знаков, упрощения конструкции, повышения технологичности и надежности работы в различных внешних условиях. Поставленная цель достигается тем, что в аналитический стереофотограмметрический прибор, содержащий снимкодержатели, электромеханическое устройство для перемещения снимкодержателей на плоскости и их поворота, устройство для создания воздушной подушки между подвижным и неподвияшым элементами электромеханического устройства, двухканальную оптическую систему с поляризаторами в каждом канале и обпшм экраном, задатчик координат точек стереомодели, электронную вычислительную машину, включающую центральный процессор, накопители на магнитных дисках, на мапштных лентах, на видеодиске, устройство ввода-вывода на перфокарте и перфоленте, устройство ввода-вывода изображения, устройство параллельной печати, пультовый терминал и графопостроитель с замкнутой телевизионной системой, введен электронно-л)евой стереодисплей с оперативными запоминающими устройствами, регистрами смещения, клапанами, счетчиками-накопителями строчной и кадрокой разверток, цифроаналоговыми преобразователями, видроусилителями, блоком формирования световой измерительной марки и клавиатурой управления ее положением, генератором кода Уровень белого, инвертором и контроллером, причем запоминавэщие устройства по входам и выходам связаны с каналом электронно-вычислительной машины через контроллер, входы регистров смещения соединены с выходами контроллера, выходы регистров смещения соединены через клапгны с параллельными входами счетчиков-накопителей строчной и кадровой разверток, информационные входы оперативного запоминающего устройства соединены через схему ИЛИ с выходом генератора, формирующего код Уровень белого и с информационными выходами оперативного запоминающего устройства через инвертор кода, выходы оперативных запоминающих устройств соединены с управляющими входами электронно-лучевой трубки стереодисплея через цифроаналоговыё преобразователи и видеоусилители, а оптическая система снабжена матричными приемниками изображений с видеоусилителями, блоками управления считыванием и контроллером, объе тивами, шаговыми двигателями с блоками управления и контроллером, причем объективы механически связань с выходными валами ща говых двигателей, входы щаговых двигателей соединены с каналом электронно-вычислительной мащины через контроллер и блок управления. В стереофотограмметрическом приборе блок формирования световой измерительной марки и управления ее положением снабжен регистрами координат текущего положения измерительной марки, синхрогенератором, схемами сравнения кодов счетчиков строчной и кодово разверток с кодами регистров координат текущего положения измерительной марки, клапаном, ключевыми элементами, преобразователями код-ток, фокусирующе-отклоняющей системой, причем один вход схем сравнения подключен к каналу электронно-вычислительной машины через регистр текущих координат и контроллер двухкоординатных линейных шаговых двигателей, другой вход схем сравнения подключен к выходам счетчиков строчной и кадровой разверток, выходы схем сравнения объединены по схемам И в клапане с аналоговым выходом генератора Уровень белого, В.ЫХОД клапана соединен с одними входами па ключей, выходы которых объединень по схеме ИЛИ и соединены с управляющими электр дами многоцветной электроннолучевой трубки другие зходы пар ключей соединены t выходами оперативных запоминающих устройств че 26 рез цнфроаналоговые преобразователи и видеоусилители, а выходы счетчиков строчной и кадровой разверток соединены с входами фокусирующе-отклоняющей системы электроннолучевой трубки стереодисплея через преобразователи код-ток. Блок формирования световой измерительной марки и управления ее положением снабжен генератором символов, вход которого соединен с со9тветствующим выходом контроллера стереодисплея, а выход с входом ОЗУ через схему И ЛИ-И клапана. Электромеханическое устройство снабжено плитой, не менее, чем с двумя идентичными взаимно-перпендикулярными системами параллельных канавок, образующих статоры двухкоординатных линейных шаговых двигателей, индукторами двухкоординатных линейных шаговых двигателей с группами магнитов, снабженными фазными обметками, блоками управления двухкоординатными линейными шаговыми двигателями со схемой дробления шага, щаговыми двигателями с механизмами для поворота снимкодержателей, контроллером для связи блоков управления двухкоординатнымн линейными шаговыми двигателями и шаговыми двигателями для поворота снимкодержателей с каналом электронно-вычислительной машины, причем снимкодержатели с размещенными на них щаговыми двигателями и редукторами для их поворота закреплены на подвижных индукторах, входы шаговых двигателей для поворота сиимкодержателей соединены с каналом электронно-вычислительной машины через блоки управления и контроллер выходные валы шаговых двигателей для поворота снимкодержателей механически связаны с механизмами поворота снимкодержателей, а фазные обмотки групп мапштов соединены с каналом электронно-вычислительной ма1шшы через контроллер и блоки управле1ШЯ двухкоординатных линейных шаговых двигателей н контроллер. На фиг. 1 изображена блок-схема прибора; на фиг. 2 - структурная схема стереодисплея; на фиг. 3 - структурная схема блока формирования световой измерительной марки и управления ее положением; на фиг. 4 - кинематическая схема электромеханического устройства и схем оптической системы; на фиг. 5 - структурная схема управления матричными приемниками изображений; на фиг. 6 - структурная схема управления двухкоординатными линейными шаговыми двигателями; на фиг. 7 - структурная схема блока дробления шага; на фиг. 8 - блок-схема управления поворотными шаговыми двигателями; на фиг. 9 структурная схема задатчика координат точек стереомодели; на фиг. 10 - структурная схема 79 контрол)гера; на фиг. 11 - структурная схема графопостроителя. Прибор представляет модульную структуру, которая содержит ряд модулей, сопрягаемых с каналом ЭВМ, являющейся ядром прибора. В состав прибора входят следующие модули (фиг. 1) : эадатчик координат х, у, z точек стереомодели 1 с блоком сопряжения с каналом ЭВМ или контроллером 2; электромеханическое устройство 3 перемещения снимков с контроллером 4, оптическая система 5 с контроллером 6; стереодисплей 7 с контрол лером 8; пультовые алфавитно-цифровой терминал 9 с контроллером 10; графопостроител 11с контроллером 12; передающей телевизио ной камерой 13 и телевизионным приемником 14; центральный процессор 15 с контроллером 16; накопитель 17 на магнитнчх дисках с контроллером 18; накопитель 19 на магнит ных лентах с контроллером 20; накопитель 2 на видеодаске с контроллером 22; устройство 23 ввода-вывода изображения с контроллером 24, а также устройство 25 параллельной печати с контроллером 26; yctpoйcтвo 27 ввода-вывода перфоленточное и перфокарточно с контроллером 28 и интерфейс ЭВМ 29. Структура является открытой для пополнения и развития другими внешними устройствами или модулями, например, специальны ш дисплейными процессорами, каждый из которых является или законченным функциональным устройством или компонентным, входящим в функционально законченное устройство. Входящие в состав прибора модули имеют следующее назначение. Стереодисплей предназначается для стереоскопического наблюдения анаглифическим способом модели местности, построенной по фраг ментам изображений, подвергнутых фотоэлектрическому преобразованию и выведенных на экран цветного дисплея каждое в своем цвете, например, в красном R и зеленом G. Наблюдение стереомодели осуществляется через очки с поглотительными фильтрами, так что каж дым глазом воспринимается свое изображение. В состав стереодисплея 7, схема которого показана на фиг. 2, входят многоцветная элек тронно-лучевая -с экраном трубка 30 с клавиатурой зшравления 31, видеоусилители канал ных сигналов 32 и 33, блок 34 формировани световой измерительной марки, цифроаналоговые преобразователи 35 и 36, оперативные запомина1ющие устройства R- и G-изображений регенеративного типа 37 и 38, счетчики-накопители строчной 39 и 40 и кадровой 41 и 42 разверток, клапаны 43-46, регистры 4750 смещения, генератор Уровень белого 51, генератор 52 символов, инвертор 53 кода, г групповая схема ИЛИ-И 54 и контроллер 8. При функционировании стереодисплей взаимодействует также с блоком управления двухкоординатными линейными щаговыми двигателями электромеханического устройства через контроллер 4 и с блоком управления матричными приемниками изображений оптической системы- через контроллер 6 (фиг. 1), а через них с процессором прибора 15 и 16 через интерфейс ЭВМ 29. В режиме стереоскопического вывода изображений на экран электроннолучевой трубки стереодисплей функционирует следующим образом. Фрагменты левого и правого изображения, считываемые с матричных приемников изображений, преобразуются в цифровую форму и через контроллер 6, интерфейс ЭВМ 29 и контроллер стереодисплеяЗ записываются в оперативное запоминающее устройство (ОЗУ) 37и 38. Далее в ОЗУ осуществляется процесс регенерации изображений типа чтение-паузазапись с телевизионной частотой. В каждом цикле регенерации цифровые коды, считывает мые с ОЗУ, подвергаются цифроаналоговому преобразованию в цифроаналоговых преобразователях 35 и 36 и далее через видеоусилитель 32 и 33 поступают на управляющие входы многоцветной электроннолучевой трубки 30. В результате на экране стереодисплея генерируется левое R-изображение и правое G-изображение, которые при наблюдении через поглотительные фильтры оператором воспринимаются как объемная стереомодель. Устранение поперечных и продольных параллаксов в каждой точке стереомодели, наблюдаемой на экране стереодисплея, идентифицируемой световой измерительной маркой, осуществляется дополнительным смещением фрагментов изображений, выводимых на экран стереодисплея путем переадресащш при считывании изображений из ОЗУ 37 и 38 в паузе между записью и чтением. Цифровые коды сдвига изображений вычисляются в ЭВМ по программе двойной обрат-; ной фотограмметрической засечки и передаются из процессоров 15 и 16 через интерфейс 29 и контроллер 8 на регистры смещения j47-50. Коды, записанные в счетчики-накопи тели 39-42, складываются с текущими кодами цифровой развертки изображения по экрану стереодисплея. В результате выборка всех элементов R- и О-изображений из ОЗУ 37 и 38осуществляется по адресам, отличным на величины смешения от адресов записи. Поскольку начало развертки синхронизировано с запуском операции считывания из ОЗУ, то построение R- и G-изображений на экране стереодисплея осуществляется с требуемыми сдвигами, относящимися к точке наблюдения, фиксируемой световой измерительной маркой. При изменении положения световой измери тельной марки с помощью задатчика 1 координат (фиг. 1) коды смещения соответственно изменяются и в очередном цикле регенерации будут осуществлены дополнительные сдвиги изображений. В результате под измерительной маркой будут находиться точки изоб ражений, в которых будут исправлены продольные и устранены поперечные параллаксы. Преимущество построения стереомодели заключается в том, что, ведет к сокращению объема ОЗУ 37 и 38 за счет основной величины сдвига, приводящей к увеличению ОЗУ, уже осуществленной в электромеханическом устройстве относительно точки, находящейся под измерительной маркой оптической системы с поляризаторами и общим экраном. В стереодисплее реализуются только дополнительные сдвиги В- и G-изображений, соответствующие перемещению световой измерительной марки, относительно точки, находящейся под измерительной маркой экрана оптической системы аналитического прибора. В дополнение отметим возможность использования стереодисплея в режиме вывода изображений в псевдоцветах. В этом случае на управляющие электроды многоцветной трубки должны подаваться три канальных изображеяия в соответствующих цветах соответственно с выходов трех оперативных запоминающих устройств типа 37 и 38 (на фиг. 2 третье запоминающее устройство не показано), запись информации в которые осуществляет процессор. Нанесение отметок на анализируемое женне или трассирование осуществляется в стереоскопическом режиме наблюдения путем изменешм в цикле записи содержимого ячеек ОЗУ стереодисплея на Уровень белого по текущему адресу в момент сравнения кодов X, V световой марки, вычисленных в ЭВМ, С кодами счетчиков строчной и кадровой развертки. Удаление некоторых элементов с аиали зируемого изображения осуществляется в цикл записи путем инвертирования содержимого яче ек ОЗУ дисплея по текущему адресу в момен сравнения кодов х, у световой измерительной марки, вычисленных в ЭВМ, с кодами счетЧХКО8 строчной и кадровой развертки. Легко видеть, что способ построения стерео модели; на экране дисплея, а также нанесение отметок, трассирование или удаление точе ных или протяженных элементов инвариантен к аберрациям, свойственным электронно-лучевым трубкам, поскольку и исходная, и обновленная информация, полученная с матрич3223210
иых приемников изображения, у которых геометрические аберрации отсутствуют, и записанная в ОЗУ дисплея, не искажается.
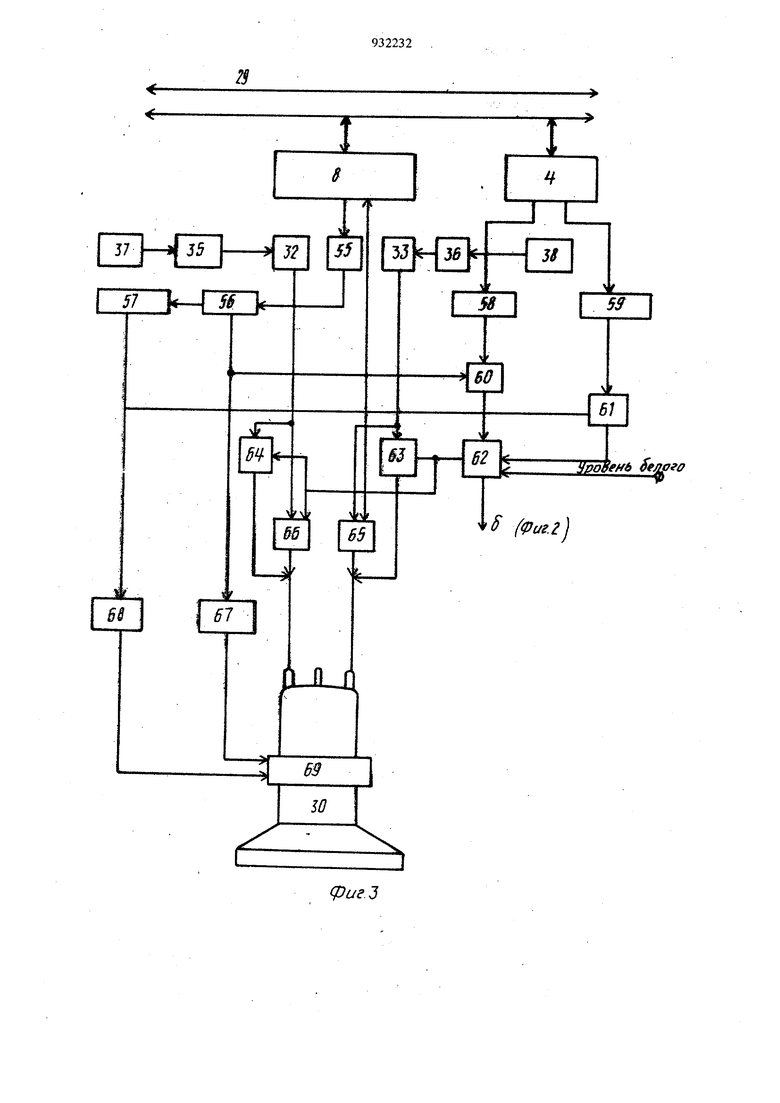
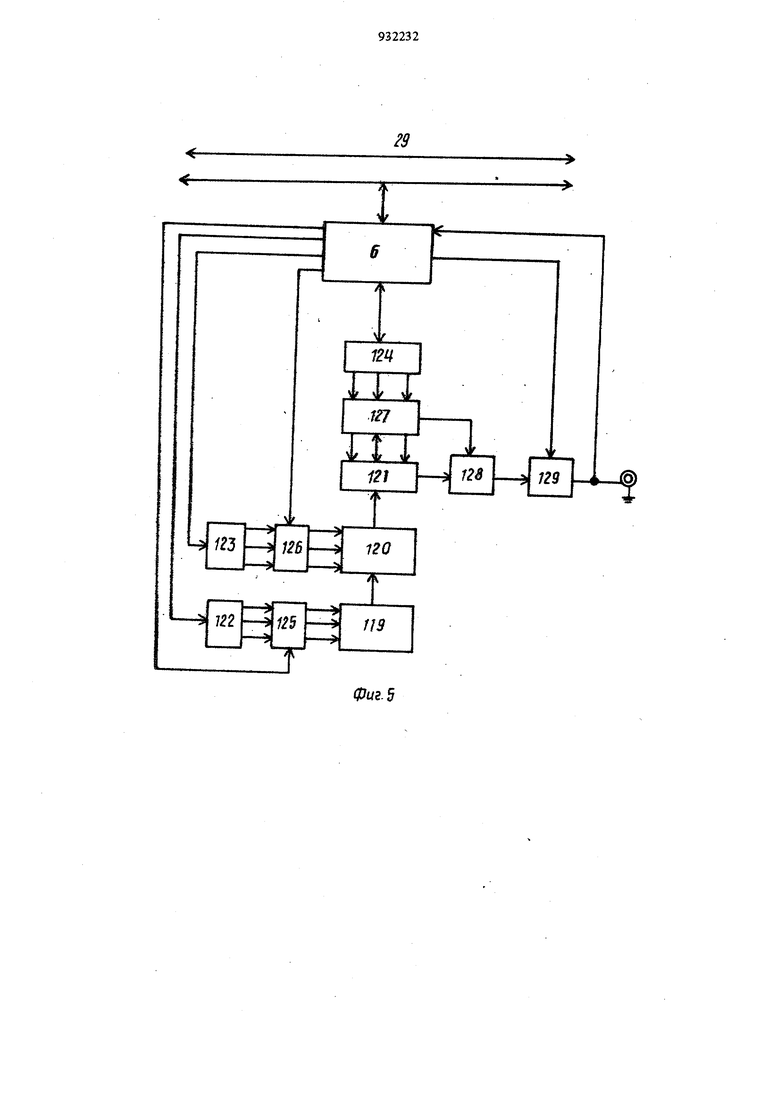
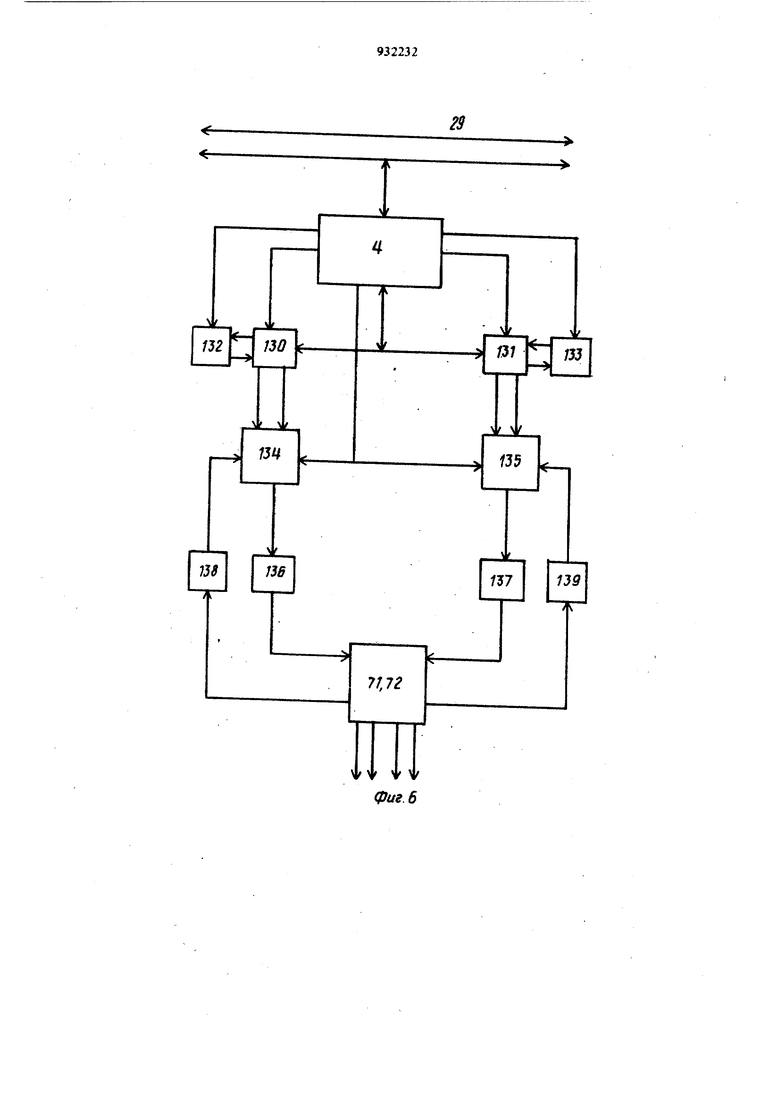
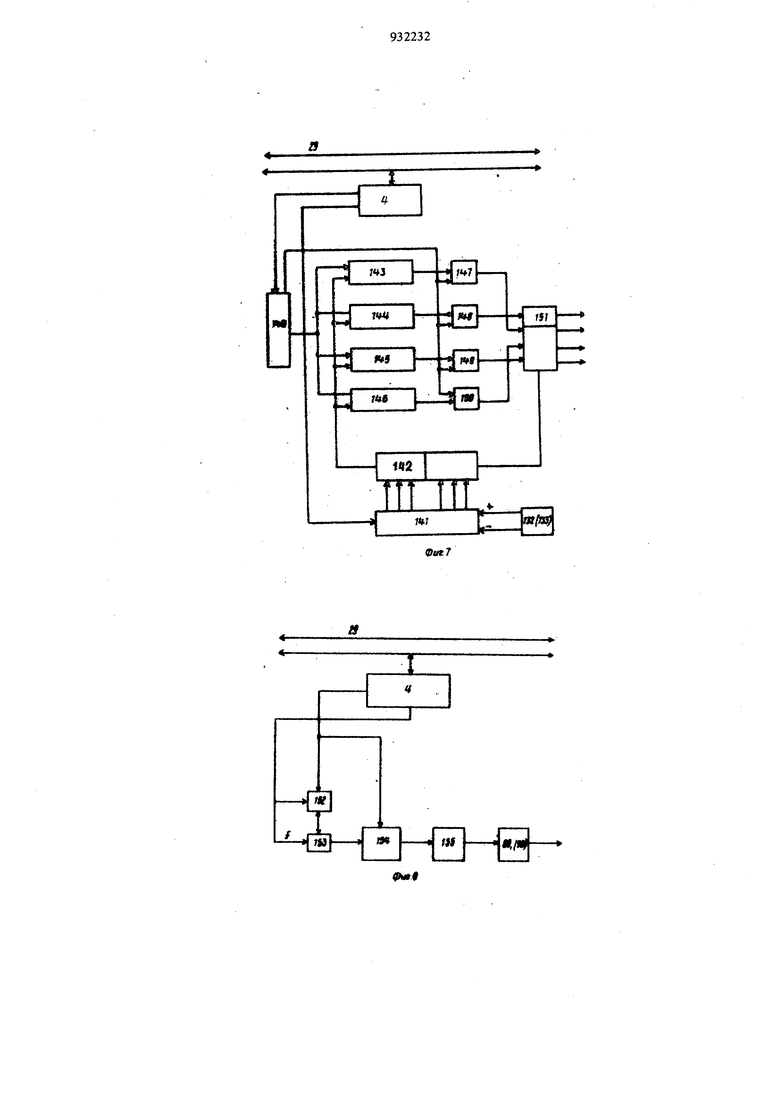
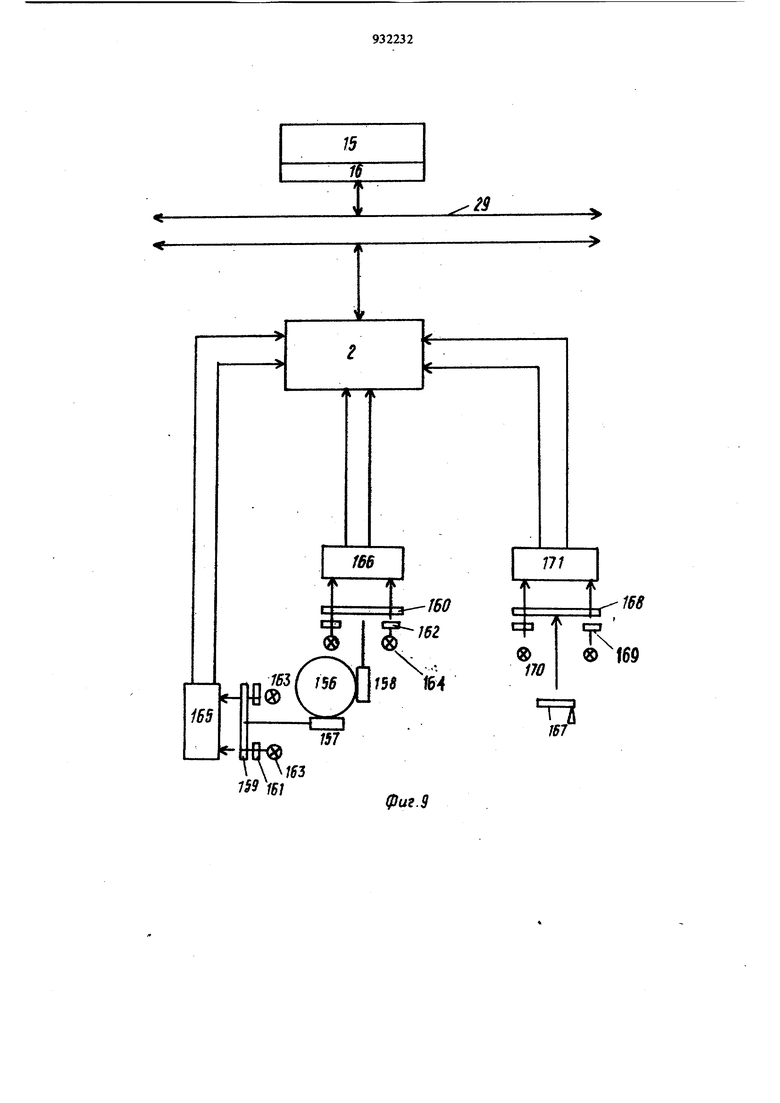
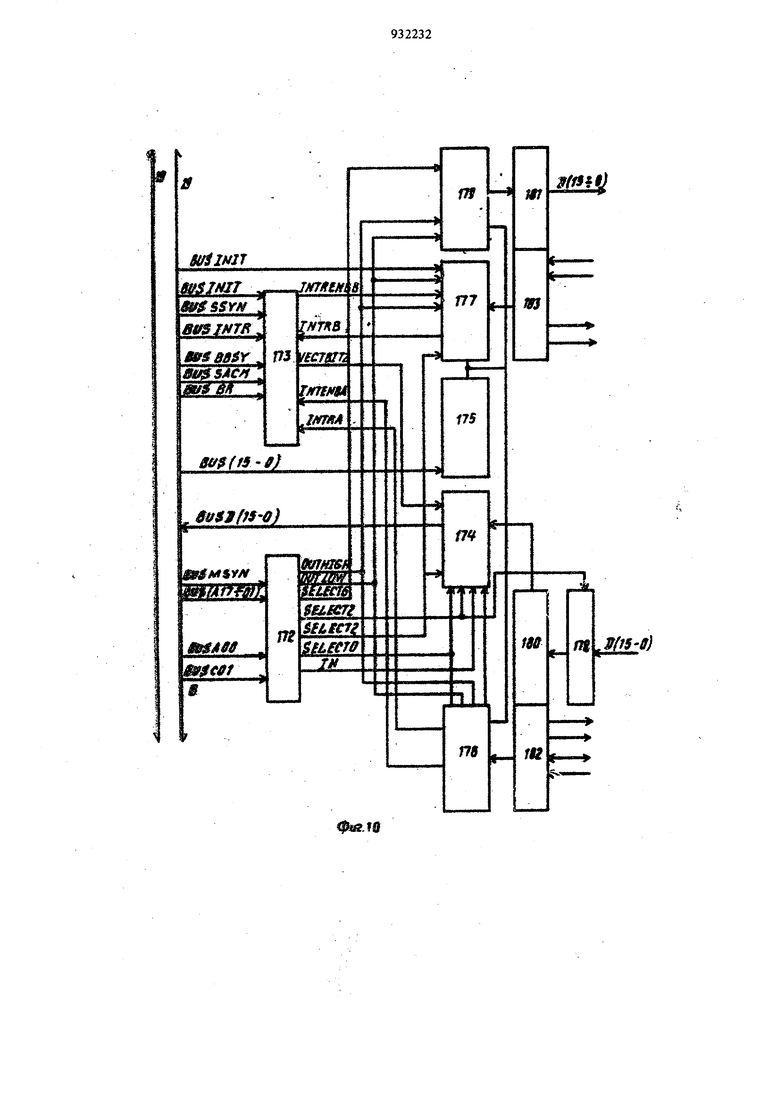
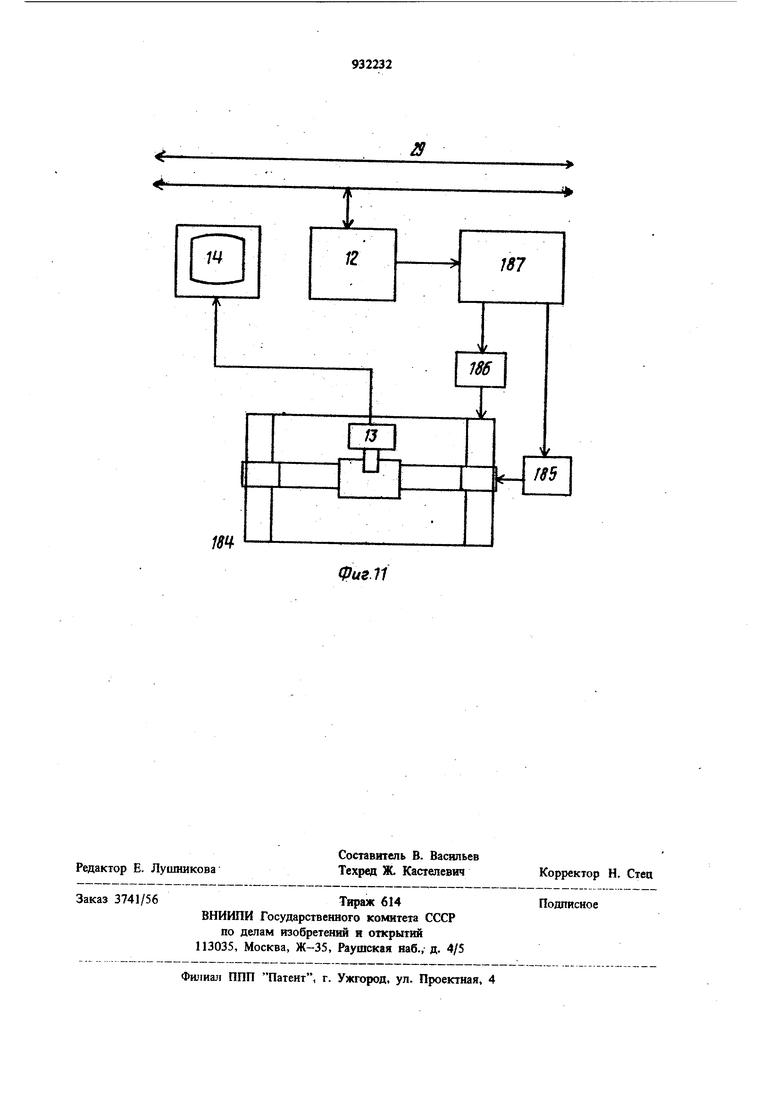
Блок 34 (фиг. 2) формирования световой 5 измерительной марки и управление ее положением предназначается для генерации измерительной марки и ее перемещения по экрану стереодисплея. Как следует из назначения в противоположность принятому в аналитических приборах способу реализации неподвижной марки, располагаемой в центре поля зрения, здесь измерительная марка реализована как подвижная для достижения возможности рисовки по исследуемому изображению и удаления с него некоторых элементов с записью ОЗУ 37 и 38 или стирания следа измерительной марки без существенного увеличения объема ОЗУ. В случае неподвижной измерительной марки для трассирования были бы необходимы ОЗУ для размещения в них всей площади стереопары. В предлагаемом варианте объем ОЗУ сокращается за счет размещения в них только фрагментов изображения, проектируемых на матричные приемники изображений. Если возникает необходимость хранения изображения со всей площади стереопары, то такая запись осуществляется частями, при этом общий файл изображения формируется на внещних запоминающих устройствах ЭВМ. Структурная схема блока 34 формирования световой измерительной марки показана на фиг. 3, в состав которого входят синхрог«гератор 55, счетчик строчной развертки 56, счетчик 57 кадровой развертки, регистры 58 и 59 текущих координат световой измерительной марки, схем 60 и 61 сравнения координат световой измерительной марки с кодами координат строчной и кадровой развертки, клапан 62 стробирующий сигнал Уровень белого в момент совпадаю1я сигналов с схем 60 и 61 сравнения, ключевые схемы 63-66, преобразователи код-ток 67 и 68 и фокусирующе-отклоняющая система 69 многоцветной электронно-лучевой трубки 30. На фиг. 3 также повторены ОЗУ 37 и 38, l l™ L ff видеоусилители 32 и 33. Световая измерительная марка генерируется в каждом кадре в моменты сравнения кодов X, у, вычисленных в ЭВМ и записанных в регистры 58 и 59 с кодами счетчиков строчной и кадровой развертки 56 и 67 путем подачи. на управляющие электроды постоянного сигнала, формирующего Уровень белого через клапан 62. Управление световой измерительной маркой стереодисплея осуществляется от задатчика координат X, у, 2, которые пересчитываются в ЭВМ в сигналы управлегшя пб алгоритму 119 двойной обратной фотограмметрической засечк точно так же, как и для управления электромеханическим устройством, фактически имеет место переключение управляющих сигналов с входов блоков управления линейными двухкоординатнБ МИ шаговыми двигателями на вход преобразователей код-ток фокусирующего отклоняющей системы стереодисплея через контроллер 4. Электромеханическое устройство 3 (фиг. 1) предназначено для перемещения и поворота снимкодержателей со снимками стереопары на величины, вычисляемые в ЭВМ по алгоритм двойной обратной фотограмметрической засечки, причем входными переменными для работя этой программы являются координаты точек стереомодели (карты) х, у, z, формируемые задатшками координат 1 И матрищ 1 элементов внешнего ориентирования, вычисляе мые ЭВМ также по программе при работе прибора в стереокомпараторном режиме. Кинематическая схема электромеханического устройства показана на фиг. 4. Электромеханическое устройство содержит плиту 70, на которой нанесены по меньшей мере две адентичные взаимно-перпендикулярные системы параллельных канавок 71 и 72, которые образуют статоры двухкоордннатных линейных, шаговых двигателей. Над статорами 71 к 72 расположены индукторы 73 и 74 двухкоординатных линейных шаговых двигателей, которые перемещаются о-гаосительно статоров на магнитно-воздудщой подушке. В индукторах 73 и 74 размещены группы магтеггов 75 и 76 с фазовыми обмотками для перемещения их по оси х, а также группы ма 1ПГГОВ 77 (второй магнит расположен симметрично относительно магнитов 75 на. фиг. 4 не виден) и 76 (второй магнит 78 расположен симметрично относительно магнита 76, на фиг. 4 не виден) для перемещения индукторов по оси у. Кроме того, магниты 75 и 76 снабжены воздушной подушкой между статорами и индукторами. С индукторами 73 и 74 жестко связаны кронштейны 79 и 80, на которых размещены каретки снимкодержателей 81 и 82, под каретками снимкодержателей расположены источники освещения снимков (на фиг. 4 не видны). Каретки снимкодержателей содержат механизмы 83-86 для разворота располагаемых в них снимков 87 и 88 на углы х и х , кинематически связанные с шаговыми двигателями 89 и 90. Положение KajJeTOK снимкодержателя в процессе работы может контролироваться датчиками 91 -94 обратной связи (например, лазерными измерителями перемещений), неподвижные элементы которых располагаются на плите 70, а подвижные элементы связаны с каретками снимкодержателя 81 и 82 Для управления положением индукторов 73 и 74, а следовательно и кареток снимкодержателей, по координатам х, у двухкоординатные линейные гиаговые двигатели снабжены блоками 95 управления. Для управления шаговыми двигателями 89 и 90 последние снабжены блоками 96 управления. Для передачи управляющей информации из канала 29 ЭВМ на блоки управления 95 двухкоррдянатными линейными шаговыми двигателями и управляющей информации на блоки 89 и 90 управления шаговыми двигателями, электромеханическое устройство снабжено контроллером 4, который имеет средства стандартного сопряжения с интерфейсом 29. В случае применения в электромеханическом устройстве датчиков 91-94 обратной связи передача информации обратной связи -в каналы ЭВМ осуществляется также через контроллер 4, который имеет средства стандратного сопряжения с каналом 29 ЭВМ. На фиг. 4 контроллер 4 разбит на три части, разделенные пунктирными линиями: одна часть обслуживает линейные шаговые двигатели, другая поворотные шаговые двигатели 71 и 72, а третья - датчики обратной связи 91-94. Оптическая система предназначена для визуального наблюдения участка стереомодели по фрагментам, находящимся в поле зрения и для фотоэлектрического преобразования оптических плотностей этих фрагментов изображений в электрические сигнал ы. Оптическая система 5 (фиг. 1) построена на принципе наблюдения стереомодели и измерения координат точек по способу поляроидов и содержит главные объективы 97 и 98, поляризаторы 99 и 100, полупрозрачные зеркала 101 и 102, расположенные под углом 45° к плоскости снимка, зеркало 103, установленное под углом 45° к плоскости снимка, полупрозрачное зеркало 104, на которомпроисходит объединение поляризованных световых потоков, прошедших от снимков 87 и 88 через главные объективы 97 и 98; зеркало 105 и экран 06. Наблюдение стереомодели осуществляется оператором через очки- анализаторы таким образом, что левым глазом наблюдается только левое поляризованное в одной плоскости изображение, а правым - только правое поляризованное в другой плоскости изображение. Для фотоэлектрического преобразования фрагментов левого и правого снимка оптическая система снабжена матричными приемниками изображений (например, на основе приборов с зарядовой связью) 107 и 108, на фоточувствнтельные элементы которых изображения проектнруются с помощью объективов 109 и ПО. Для управления секциями накопления и секциями памчти матричных приемников изображения оптическая система снабжена блоками 111 и 112 управления с аналого-цифровыми преобра зователями (АЦП), а для усиления видеосигналов - усилителями 113 и 114. Для управления размерами фрагментов изображений, под вергаемых фотоэлектрическому преобразованию, оптическая система снабжена шаговыми приводами, состоящими из шаговых двигателей 115 и 116 и блоков 117 и 118 управления шаговыми двигателями. Для передачи управляющей информации из интерфейса 29 ЭВМ на блоки 117 и 118 управления шаговыми двигателями и видеоинформации с видеоуси}1ителей 113 и 114 через блоки 111 и 112 управления матричными приемниками изображений оптическая система снабжена контроллером 6 (фиг. 1), который имеет средства стандартного сопряжения с интерфейсом 29 ЭВМ по трактам управления и видеоршформацки. Блоки 111 и 112 управления матричными приемникалш изображений предназначены для управления процессами накопления зарядов Б элементах секции накопления, запоминания их в секциях памяти и считывания информации через выходные регистры и видеоусилители 113 и 114. Структурная схема блока управлеютя матри ными приемииками изображений представлена на фиг. 5, где в более детальном виде показаны матричные приемники 107 и 108 изображений, состоящие из секции 119 накопления, секции 120 памяти и выходного регистра 121. Собственно блок управления содержит формирователи 122 и 123 фазных напряжений для секций накопления и памяти соответственно; формирователи 124 фазных напряжений для выходного регистра, преобразователи 125-127 уровня для секций накопле ния памяти и выходного регистра соответстве но; выходной блок 128 и видеоусилитель 129 (фиг. 5). Для связи блока управления матричных фо топриемников по управлению и видеоинформации с ЭВМ блок управления снабжен контроллером 6, который имеет соседство стандартного сопряжения с интерфейсом 29 ЭВМ. I Блок 95 управления двухкоординатными линейными шаговыми двигателями 71 и 72 (фи1. 4) являются идентичными и состоят из программных блоков 130 и 1J1, счетчиков 132 и 133 шагов и скоростей отработки, блоков 134 и 135 дробления шага, усилителей 136 и 137 мощности и блоков 138 и 139 демпфирования (фиг. 6). Для обмена информацией между ЭВМ и бл ками управления служит контроллер 4, который снабжен средствами стандартного сопряжения с интерфейсом 29 ЭВМ. 9 14 Блок дробления шага J34 в блоках управления служит для повышения точности позицио шрования 1шдукторов двухкоординатных линейных шаговых двигателей. Структурная схема дробления шага представлена на фиг. 7, где блок дробления шага содержит дели1ель 140 частоты, управляемый частотой, генерируемой в контроллере 4; реверсивный счетчик 141, управляемый частотой управления из контроллера 4, и направлением счета (вперед + назад -) от программного блока 132 (или 133 фиг. 6), деишфратор 142, постоянное запоминающее устройство 143-146 с полями, с помощью которых аппроксимируются на периоде функции sm6 , cos 9. sin(9- ), cos(9-) по 64 точкам с точностью 1/256 их амплитуды; триггеры 147150; программируемый распределитель 151 импульсов, осуществляющий широтно-нмпульсную модуляцию сгтгналов, подаваемых иа усилители 136 и 137 мощности (фиг. 6). Блоки 96 управления шаговыми двигателями 89 и 90 предназнача ются для разворота снимков на углы х и х . Структурная схема блока управления представлена на фиг. 8, где блок управления содержит счетчик 152 шагов, куда заносится код угла поворота снимка; клапан 153, который закрывается при обнулении счетчика импульсами управления, поступающими из контроллера 4; коммутатор 154 фаз, куда поступает также признак знака кода, заносимого в счетчик 152, усилитель 155 мощности, выходы которого связаны с фазными обмотками шаговых двигателей 89 и 90 (фиг. 4). Задатчик 1 координат (фиг. 1) предназначен для формирования импульсов прираше1ШЯ координат точек х, у, z стереомодели. Структурная схема задатчика координат представлена на фиг. 9, который состоит из генератора приращения кооршшат х, у и формирователя приращения z. Генератор приращений координат X, у точек стереомоделн содержит шар 156, вращающийся на плоскости; два перпендикулярно расположенные и фрикционно связанные с щаром вала 157 и 158, с выходными осями которых связаны круговые (например, фотоэлектрические) преобразователи угла поворота в число-импульсный код, включающий вращающиеся лимбы 159 и 160, на поверхности которых по окружности нанесены деления; неподвижные элементы 161 и 162, на поверхности которых по окружности нанесены деления, сдвинутые на четверть периода; источники 163 и 164 подсвета и формиртвателн 165 и 166 импульсов модулей и знаков приращения. Формирователь Z координат точек стереомодели представляет также фотоэ-тектрический преобразователь угла поворота штурвала (нож ного или ручного) 167 в ЧИСЛО-ИМ11у}1ЬСНЫЙ код и содержит лимб 168, связанный с осью штурвала 167; неподвижные элементы лимба 169 с делениями, смещенными на четверть периода, источники 170 подсвета и формирователь 171 импульсов модуля и знака приращений. Сформированные в задатчике координат X, у, Z точек стереомодели импульсы приращения вместе со своими знаками подаются в контроллер 2, где инициируют в интерфейсе ЭВМ запрос на прерывание, переход к программе обслуживания этого модуля и их передачу в ЭВМ через интерфейс 29 и контроллер 16. В связи с тем, что аналитический прибор для стереоскопического дешифрирования изображений строится по модульному принципу, каждый входящий в его структуру модуль со д ержит контроллер, который имеет средства стандратного сопряжения с интерфейсом ЭВМ. Структура контроллеров определяется идеологией интерфейса, принятого в ЭВМ, а также физическими принципами дeйctвия модулей, числом каналов, скоростью и объемом информации, циркулирующей между модулями ЭВМ В данном варианте прибора в качестве процессора (процессоров) применяется ЭВМ из семейства СМ ЭВМ с интерфейсом, общая щина которой в соответствии с ОСТ 25 795 - 78, определяется как унифицированная система связей и сигналов между центральным про цессором, устройствами памяти и периферийными устройствами, устанавливающие единые форматы информации, принципы обмена и последовательности сигналов между всеми воз можными типами устройств из номенклатуры комплексов. В рамках данного описания мы не имеем возможности представить структурные схемы контроллеров всех модулей, входящих в сост прибора. С принципиальной точки зрения в это нет необходимости, так как контролеры в основ ном различаются режимом передачи, количеством информационных регистров ввода-вывода, количеством регистров состояния вводавывода и соответственно количеством разрядов шин адреса, отводимых под адресацию регистров, а также количеством разрядов децшфратора адреса. Поэтому для пояснения принципа действия контроллеров ограничимся описанием типового контроллера, содержащего по одному информационному регистру вво да-вывода и по одному регистру состояния ввода-вывода. Типовой контроллер (фиг. 10) содержит д шифратор адреса 172, схему 173 управления прерыванием, передатчики 174 информации на общую тину, приемники 175 информации с общей тины, регистр 176 команд-состояний ввода, регистр 177 команд-состояний вывода, регистр 178 данных ввода, регистр 179 данных вывода, приемники 180 внепшего устройства (модуля), передатчики 181 внешнего устройства (модуля), схему 182 управления вводом, схему 183 управления выводом. Неотъемлемой частью аналитического прибора является графопостроитель (фиг. 11), в состав которого входят электромеханический блок 184 с шаговыми двигателями 185 и 186, блоком 187 управления, передающая телевизионная камера 13 и телевизионный приемник 14 (фиг. 1). Для передачи управляющей информации из ЭВМ через интерфейс 29 графопостроитель снабжен контроллером (фиг. 1). Рассмотрим функционирование аналитического стереоприбора в пяти режимах. 1.В режиме измерения координат и высот точек (фиг. 4) стереомодели оператором с наблюдением модели на экране 106. 2.В режиме нанесения отметок на исследуемое изображение или трассирования в стереоскопическом режиме с наблюдением стереомодели на экране .стереодисплея 30; 3.В режиме удаления с изображения какихлибо элементов при стереоскопическом наблюдении модели на экране стереодисплея 30. 4.В режиме фотометрической обработки левого и правого изображений или одиночного изображения со стереоскопическим или монокулярным наблюдением результата обработки на экране дисплея 30. 5.В режиме документирования результатов фотограмметрической фотометрической обработки (преобразований оптических плотностей) путем фотографирования с экрана дисплея или вывода данных на прецизионное устройство вывода изображения 23, а также в режиме графического отображения результатов обработки на планшет графопостроителя 11 (фиг. 1). Аналитический прибор в режиме измерения координат и высот точек стереомодели, в предположении, что снимки соориентированы, т.е. элементы взаимного ориентирования снимков и внешнего ориентирова1шя модели вычислены с помощью ЭВМ и находятся в рабочих ячейках оперативной памяти, а значения углов X и х отработаны в виде углов поворота снимков с помощью шаговых приводов 89 и 90 (фиг. 4), функционирует следующим образом. Оператор с помощью шара 156 и штурвала 167 (фиг. 9) определяет наведение на точку стереомодели местности, совмещая измерительную марку, нанесенную на экран 106. с поверхностью стереомодели. Формируемые фотоэлектрическими датчиками 159, 160, 168 и формирователями 165. 166, 171 импульсы приращений координат точек стереомодели, вызывая прерывания в системе, через контроллер 2 передаются в ЭВМ. При этом управление по установленному вектору прерывания передается программе вычисления двойной обратной фотограмметрической засечки, в результате работы которой через контроллер 4 (фиг. 4) на блоки 95 управления двухкоординатными линейными шаговыми двигателями выдаются команды, содержащие знаки и величины перемещения индукторов 73 и 74 с снимкодержателями 81 и 82 и снимкаNUf 87 и 88 по координатам х, у и х , у . В блоках 95 управления осуществляется электри ческое дробление шага величины этих пер«мещений преобразуются в унитарные коды, и сфор1ътроваиные таким образом сигналы управ ления поступают в соответствующие фазные обмотки групп магюпов 77, 78, 75, 76 двух. координатных лииейвых фазовых двигателей. Под воздействием сигналов управления в двухкоордиматных линейных шаговых двигателях развиваются тяговые уснляя, которьге пер мещают на аэростатических опорах индукторы 73 и 74 с жестко связанными с ними снимко дерэкателями 81 и 82 со снимками 87 и 88 ш велуяияы, равные значениям Xj-xj., Vj-Vj-i xi-xil.,,y:-yiLi, или xj-xjoc, yj-Vioc. xi-xjo y-yJog, если прибор оборудован датчиками 91-94 обратной связи (где i, i-1 соответствен но номер текущего и предшествующего циклов вычисления двойной обратной фотограмметрической засечки). В результате под измерительную марку подводятся точки левого и правого снимков, соответствующие точке стереомодели с координатами х, у, 2, установленными с помощью задатчика координат. При непрерывном изменении х, у, z указанный цикл повторяется с некоторой постоянной частотой, обусловленной быстродействием ЭВМ, что соответствует непрерывному перемещению индукторов 73 и 74 с снимкодержателями 81 и 82 и снимками 87 и 88. В режиме стереоскопического нанесения отметок и трассирования с наблюдением ре,зультатов на экране стереодисплея аналитический прибор функционирует следующим образом (фиг. 2). Выбор фрагмента изображения, на площади которого предполагается осуществлять нанесение отметок или трассирование, осуществляется в режиме стереоскопического наблюдения на экране 106 так, как описано выше, а размеры фрагментов отрабатываются шаговыми двигателями 115 и 116. При этом результаты фотоэлектрического и аналого-цифрового проо азования фрагментов изображений с ПЗСматриц записынаются ОЗУ 37 и 38 и циклически ре|-енсрируются без дополнительного сдвига на экране стереодисплея, т.е. считывание должно осуществляться по тем же адресам, что и запись, модель будет исправлена дан той же точки, которая находится под измерительной маркой на экране 106, а ее наблюдение может осуществляться как по экрану 106 так и по экрану 30. Последовательность пользования оператором экраном 106 или экраном 30 и соответственно типами очков (поляроидными или анаглифическими), вообще говоря, может быть произвольной. Однако в большинстве случаев эта последовательность определяется технологией дещифрирования. Так, если в начале выполняется измерительное дешифрирование (измеряются пространстве1Шые координаты точек пластовых треугольников, вычисляются элементы залегания и т.д.), то целесообразно пользоваться экраном 106 и поляроидными очками, поскольку точность измерений npi их использовзюш будет выше. После завершения операции измерительного дешифрирования, например, при переходе к изучешно структурной обстановки, когда требуется оперативное трассирование по наблюдаемой стереомодели линеаментов, разломов, элементов локальных структур и тл. и оперативное удаление оишбочно трасс1фованяых элементов, целесообразно пользоваться экраном 30 телевизионного стереодисплея и анаглифическямн очками, поскольку с помощью последних возможно и стереоскопическое наблюдение, и трассирование геологических элементов непосредственно по одному из снимков, и запись результатов в регенеративную память. Далее с пультового терминала управление передается контроллеру стереодисплея 8. Вследствие такой передачи результаты перевычисления координат точек стереомодели в координаты точек левого и правого снимков циклически уже не будут. передаваться на входы контроллера 4 и соответственно на блоки управления двухкоординатными шаговыми двигателями, а, только на входы регистров 47-50 смещения. При этом фазные обмотки двухкоординатных линейных шаговых двигателей обесточиваются и, благодаря силам магнитного взаимодействия между статорами и индукторами последние фиксируются в этом положении. Начиная с этого момента, задатчик координат переключается на управление световой измерительной маркой стереодисплея, которую можно перемещать в любую точку стереомодели, регенерируемой на экране Стереодисплея, при этом точкой, в которой стереомодель первоначально направлена, является точка, находящаяся под измерительной маркой экрана 106. Любое дополнительное перемещение свеТОБОЙ измерительной марки относительно этой точки вызывает дополнительные поправки, вычисляемые ЭВМ, в положении текущей точ кн. Их значения через контроллер дисплея 8 заносятся в каждом цикле на регистры 47 сме щения, 49 и 48, 50. В результате при считывании и вьщаче информации на ЦАП 35 и 36 адресация ячеек ОЗУ 37 и 38 осуществляется не по адресам, формируемым счетчикаминакопителями 39, 41 и 40, 42, а по схеме кодов в элементах 39, 47, 49, 48 и 42, 50, поскольку ключевые элементы 43, 45, 44, 46 открываются по операции считывания. Так как запуск генератора развертки стередисплея, расположенного в контроллере 8; синхронизирован с запуском операции считывания, то переадресация ячеек эквивалентна сдвигу R- и G-изображений на требуемые величины поправок. Таким образом, при циклической выдаче из ЭВМ кодов смещений на регистры 47, 49, 48, 50 и регенерации R-, G-изображений на экране стереодисплея под измерительную световую марку точно подводятся те точки изображений, которые соответствуют точке модели с координатами х, у, z. Нанесение отметок в исследуемое стереоизоб ражение например, в R-изображенйе (фиг. 2) или трассирование с помощью стереоскопической измерительной марки осуществляется следующим образом. Точечные отметки или протяженные элементы формируются с помощью блока 51, в котором генерируется : код Уровень белого (минимальный или нулевой код). Перенос кода Уровень .§елого в ячейки ОЗУ 37 осущес вляется по операции записи со смещением в моменты сравнения кодов координат световой измерительной марки стереоднсплея, вычисляемых в ЭВМ с текущими координатами, фор мируемыми в счетчиках строчной и кадровой развертки 56 и 57 (фиг. 3 сигнал с выхоца б). Сформированные на выходе схем сравнения 60 и 61 сигналы объединяются по схеме И 62. Выходной сигнал б с схемы И 62 или что то же самое, с выхода блока 34 (фиг. 2) открывает ключ 54 (фиг. 2), иницирует операцию записи в ОЗУ 37 со смещением и код Уровень белого с блока 51 записывается в ячейку ОЗУ 37 по адресу, равному сумме сме щения, записанного на элементах 47 и 49 и кодов в счетчиках развертки 39 и 41. Если трассируется протяженный элемент, то код Уровень белого в каждом цикле регене рации изображения последовательно записывает в те же 5- ячейки памяти, из которых осущес вляется выборка со смещением. Удаление точечных или протяженных элемен тов с изображения в стереоскопическом режиме осуществляется аналогично с той лишь разницей, что в адресуемые ячейки заносятся не коды Уровень белого, а инвертируемый с помощью инвертора 53 код, считываемый по соответствующему адресу из ОЗУ 37. Нанесение на исследуемое изображение кодированных алфавитно-цифровых символов осуществляется почти аналогично нанесению точечных элементов, с той лищь разницей, что в ОЗУ 37 записывается не код Уровень белого в единственную ячейку, адрес которой определяется суммой кода смещения и текущего кода адреса элемента развертки, а алфавитно-цифровой символ, генерируемый генератором символов 52, который синхронизирован с синхрогенератрром, расположенным в контроллере 8 стереодисплея. Поскольку алфавитно-цифровой символ представляется в виде бинарной матрицы, то запись этой матрицы осуществляется в несколько ячеек памяти построчно. При этом точкой, маркируемой с помощью алфавитноцифровых символов, является левый верхний угол символа. В режиме фотометрической обработки, под которой понимаются программные или программоаппаратные преобразования цифровых кодов оптических плотностей фрагментов левого или правого снимков (например, пространственная фильтрация изображения, выполняемая с целью вьщеления границ, контуров объектов и т.д.) прибор функционирует следующим образом. В процедуре фотометрической обработки участвует процессор 16, контроллер стереодисплея 8, -ОЗУ 37 и/или ОЗУ 38, в которых в цифровой форме хранятся фрагменты изображений, введенные с ПЗС-матриц 107, 108 (рис. 4). Тип операции задается с пультового терминала 9. Выполнение процедуры фотометрической обработки в процессоре 15 осуществляется в соответствии с программами обработки, вызываемыми к исполнению оператором путем нажатия функциональных клавищ или набора определенных кодов на клавиатуре пультового терминала. При этом каждой клавише или коду поставлен в соответствие определенный вектор прорывания, являющийся начальным адресом вызываемой к исполнению программы. Процессор 15 при этом работает с ОЗУ 37 или 38. Результат процедуры снова записывается в ОЗУ 37 и/или 38 и регенерируется на экране стереодисплея монокулярно или стереоскопически. Документирование результатов обработки осуществляется или фотографированием с экрана 30 (этот блок на рис. 5 не показан) или путем вывода на графопостроитель 11. В некоторых случаях в целях повыщения оперативности интерактивной обработки целесообразно снабжать стереодисплей самостоятель21ным процессором типа 15, или дисплейным процессором, который работал сконтроллером дисплея 6, будет иметь стандартизованный выход на общую шину. В этом случае в модуль стереодисплея входит я дисплейный процессор Технико-экономические преимущества прибо ipa по сравнению с прототипом заключаются в том что, при геологическом дешифрировании аэро- и космических снимков большой удельный вес в общем объеме работ составляет структурное дешифрирование, т.е. вьщеление элементов геологических структур линейного, кольцевого и др. типов, их графическое отображение привязка к картографической основе и построение легенды в принятых условных обозначениях. В настоящее время подавляющее большинство этих процессов выполняется вручную, технические средства, автоматизирующие технологию структурного дешифрирования практически отсутствуют. Изобретение отличается от прототипа, в котором тех ническими средствами могут быть реализованы лишь отдельные элементы этой технологии, именно тем, что оно снабжено техническими средствами, позволяющими охватить процессом автоматизации всю технологическую последовательность структурного дешифрирования. В, частности, для прослеживания элемен тов структурно-геологической обстановки при бор снабжен стереоскопическим дисплеем с подвижной измерительной маркой, след кото рой наносится на изображение или удаляется, а для повышения достоверности их вьщеления - средствами для фотометрической обработки, которая в нужных случаях предвари тельно может быть выполнена с целью улучшения отношения сигнал/шум. В приборе стереотелевизионной и фотоэлек трической техники обеспечена возможность реализации этих процессов в интерактивном режиме, что также повышает достоверность и оперативность структурно-тектонического дешифрирования за счет объединения логических и вычислительных ресурсов прибора с интеллектом дешифровщика, работающего в режиме аналитика. Для привязки отдедшфрованных снимков с элементами структурно-геологической обработки к картографической основе прибор снабжен не только графопостроителем, что и прототий, позволяющий лишь отображать результаты в графической форме, но также приводить собственно снимки с результатами дешифрирования к требуемым картографичес кой проекции путем трансформирования и вы вода на прецизионное устройство вывода изо ражений. Благодаря тому, что прибор снабжен генератором символов, достигаются возможности для построения легевдь к дешифрованному изображению в условных знаках не только в графической форме на графопостроителе (эта возможность имеется и у прототипов), но.также непосредственно на изображении. Все это полностью относится и к классу поисковоразведочных задач. Преимуществом предлагаемого устройства является значительное упрощение конструкции электромеханического устройства при сохранении точностных требований. Данное решение электромеханического устройства позволяет полностью исключить из кинематической схемы такие прецизионные элементы, как направляющие, винты, гайки, подшипники и др., что . ведет к упрощению конструкции устройства, k повышеш1Ю технологичности, снижению стоимости и обеспечению лучшего соотношения между стоимостью электромеханической частью прибора и ЭВМ, ибо благодаря успехам микроэлектроники стоимость минп- и микроЭВМ, применяемых в современных аналитических приборах, значительно снизилась, а стоимость оптико- и электромеханической части известных аналитических приборов, вследствие необходимости применения псречислегшых прецизионных деталей и узлов, остается на прежнем уровне, что ухудшает технико-экономические характеристики этих приборов. Применение в блоках управления двух координатных линейных шаговых двигателей (ЛШД) схем дробления шага полностью решает проблему обеспечения точности (велшгана шага составляет 10 и 5 мкм при ошибке отработки шага 5 мкм и 2,5 мкм соответственно) при управлении движениями снимков, установленных в снимкодержателях, жестко Связанных с индукторами ЛДШ, даже без обязательного применения дат41псов обратной связи, как это имеет место в прототипе. Применение в блоках управления ЛШД режимов автоматического программированного разгона и торможения полностью решает проблему обеспечения быстродействия при управлении движениями снимков (максимальная скорость перемещения индукторов составляет 300 мм/с при шаге 10 мкм, что эквивалентно достигаемой добротности по скорости не менее 30-10г/с). Развиваемый при этом ЛИЩ значительный момент (3-5 кгм) полностью решает проблему обеспечения ускорения отработки движений до Ig при общей массе снимкодержателей до 4 кг. Способность ЛШД, благодаря мощным сигналам магнитного взаимодействия в пространстве между статором и индуктором, работать в любых положениях, сохранять с высокой точностью положение индуктора относительно статора, при значительных пибрацнях, ускорениях, после выключения питания и т.Л. решает проблему работоспособности прибора и после, транспортировки, в полевых условиях. Это справедливо в том случае, если взаимное положение оптических элементов остается неизменным при указанных возмущениях. Упрощение конструкции прибора имеет следствием сохранение работоспособности и параметров в более широкой области изменения характеристик внешней среды с расширения сферы применения, например, в полевых условиях. Технике-экономический эффект от применения прибора в геологических исследованиях достигается в итоге за счет повышения производительности при решении геолого-съемочных и поисково-разведочных задач, за счет новых технических возможностей, позволяющих автоматизировать большинство технологических процессов геологического дешифрирования снимков и увязать их в единую технологическую последовательность, за счет повышения достоверности дешифрирования вследствие аппаратно-программной реализации процессов фотометрической и фотограмметрической обработки, интерактивного режима работы и авт матизации управления расчетами. Повышение производительности, а следовательно, и годового объема работ, по сравнению с технологией, объединяющей обработку вручную и возможности npoTOTPffla. является источником окупаемости капитальных вложений на разработку и тиражирование прибора. Расчет ожидаемого экономического эффекта от применения одного комплекта прибора, вы полненный на стадии НИР, показывает, что с его помощью себестоимость одного квадратного километра групповой геологической съемки при 80% заполнении геологической карты элементами, получаемыми только в процессе геологического дешифрирования аэро- и космическюс изображе1шй и при достоверности приблизительно 80% может быть снижена с 9 руб/км (традиционные способы и аппаратура дешифрирования) до 4-5 руб/км, что при годовом объеме работ Ад s; 117 тыс.км (для данного устройства) и Азх 2.7 тыс.км (для традиционных способов и аппаратуры) создает годовой экономический эффект не менее 0.5 . руб. Формула изобретения I. Аналитический стереофотограмметрнческий прибор, содерж;1щий электромеханическое устройство для перемещения снимкодержателей на 1VIOCKOCTH и их попорота, двухканальную оптическую систему с поляризаторами в каЖ ДОМ канале и общим экраном, задатчик координат точек стереомодели, электронную вычислительную машину, включающую центральный процессор, накошггели на магнитных дисках, на магнитных лентах, на видеодиске, устройство ввода-вывода на перфокарте и перфоленте, устройство ввода-вывода изображения, устройство параллельной печати, пультовый терминал и графопостроитель с замкнутой телевизионной системой, отличающийс я тем, что, с целью расширения функциональных возможностей и повышения достоверности дешифрирования изображений, в него введен электронно-лучевой стереодисплей с оперативными запоминающими устройствами, регистрами смещения, клапанами, счетчиками-накопителями строчной и кадровой разверток, цифроаналоговыми преобразователями, видеоусилителями, блоком формирования световой измерительной марки и клавиатурой управления.ее положением, генератором кода Уровень белого,, инвертором и контроллером, причем запоминающие устройства по входам и выходам связаны с каналом электронно-вычислительной машины через контроллер, входы регистров смещения соединены с выходами контроллера, выходы регистров смещения соединены через клапаны с параллельными входами счетчиковнакопителей строчной и кадровой разверток, информационные входы оперативного запоминающего устройства соединены через схему ИЛИ с выходом генератора, формирзтощего код Уровень белого и с информационными выходами оперативного запоминающего устройства через инвертор кода, выходы оперативных запоминающих устройств соединены с управляющими входами электронно-лучевой трубки стереодисплея через цифрюаналоговые преобразователи и видеоусилители, а оптическая система снабжена матришыми приемниками изображений с видеоусилителями, блоками управления считыванием и контроллером, объективами, шаговыми двигателями с. блоками управления и контрол;1ером, причем объективы механически связаны с выходными валами шаговых двигателей, входы шаговых двигателей соединены с каналом электронновычис;гительной машины через контроллер и блоки управления. 2. Прибор по п. , о т л и ч а ю щ и йс я тем, что, с целью обеспечения возможности нанесения на изображение дополнительных элементов или удаления элементов и сокращения объема оперативной памяти стереодисплея, блок формирования световой измерительной марки и управления ее положением снабжен регистрами координат текуп1его положения измерительной марки, синхрогенератором. схемами сравнения кодов счетчиков строчной и кадровой разверток с кодами регистров координат текущего положения измерительной марки, клапаном, ключевыми элементами, преобразователями код-ток, фокусирующе-отклоняющей системой, причем одни входы схем сравнения подключены к каналу электронновычислительной машины через регистр текуищх координат, контроллер двухкоординатных линейных шаговых двигателей, другие входы схем сравнения подключены к выходам счетчиков строчной и кадровой разверток, выходы схем сравнения объединены по схеме И в клапане с аналоговым выходом генератора Уровень белого, выход клапана соединен с одними входами пар ключей, выходы которых объединены по схеме ИЛИ и соединены с управляющими электродами многоцветной элек тронно-лучевой трубки, другие входы пар клю чей соединены с выходами оперативных запоминающих устройств через цифроаналоговые преобразователи и видеоусилители, а выходы счетчиков строчной и кадровой разверток соединены с входами фокусирующе-отклоняющей системы электронно-лучевЪй трубки стереодисплея через преобразователи код-ток, 3.Прибор по п. 1, отличающийс я тем, что, с целью уменьшения трудоемкости дешифрирования путем нанесения на дешифрируемое изображение дополнительных условных знаков, блок формирования световой измерительной марки и управления ее положением снабжен генератором символов, вход которого соединен с соответствующим выходо контроллера стерео дисплея, а выход - с входом ОЗУ через схему ИЛИ- И клапана. 4.Прибор по п. 1,отличающийс я тем, что, с целью упрощения конструкции, повышения технологичности и надежности работы в различных внешних условиях. 9 26 электромеханическое устройство снабжено плитой не менее чем с двумя идентичными взаимнопёрпендикулярными системами параллельных канавок, образующих статоры двухкоординатных линейных шаговых двигателей, индукторами двухкоординатных линейных шаговых двигателей с группами магнитов, снабженными фазными обмотками, блоками управления двухкоординатными линейными шаговыми двигателями со схемой дробления шага шаговыми двигателями с механизмами для поворота снимкодержателей, контроллером для связи блоков управления двухкоординатными линейными шаговыми двигателями и шаговыми двигателями для поворота снимкодержателей с каналом электронно-вычислительной машины, причем снимкодержатели с размешенными на них шаговыми двигателями и редукторами для их поворота закреплены на подвижных индукторах, входы шаговых двигателей для поворота снимкодержателей соединены с каналом электронно-вычислительной машины через блоки управления и контроллер, выходные валы шаговых двигателей для поворота снимкодержателей механически связаны с . механизмами поворота снимкодержателей, а фазные обмотки групп магнитов индукторов соединены с каналом электронно-вычислительной машины через блоки управления двухкоординатных линейных шаговых двнгателей и контроллер. Источники информации, принятые во внимание при экспертизе I.Canadian Syrveyor, 1963 June, p. 148-154. 2. Патент Франции № 2370050, кл. G 01 С 11/04, 28.01.77. Ъ- Проспект Франции - фирма MATRA OPTIQUE, TRASTER-77.1977 (прототип).
фиг.г

| название | год | авторы | номер документа |
|---|---|---|---|
| Аналитический стереофотограмметрический прибор | 1984 |
|
SU1195187A1 |
| Универсальный стереофотограмметрический прибор | 1989 |
|
SU1673832A1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ИЗГОТОВЛЕНИЯ ЦИФРОВЫХ ПЛАНОВ И КАРТ | 2007 |
|
RU2371768C2 |
| Параллаксометр | 1975 |
|
SU690316A1 |
| ФОТОГРАММЕТРИЧЕСКОЕ РАБОЧЕЕ МЕСТО | 2002 |
|
RU2225593C2 |
| Устройство для перемещения снимкодержателей фотограмметрического прибора | 1985 |
|
SU1323533A1 |
| Способ исправления топографической карты по аэрофотоснимкам стереопары | 1981 |
|
SU1000756A1 |
| Стереофотограмметрический прибор | 1981 |
|
SU991168A1 |
| ПРИБОР ДЛЯ СТЕРЕОФОТОГРАММЕТРИЧЕСКОЙ ОБРАБОТКИ АЭРОСНИМКОВ | 1948 |
|
SU79204A1 |


фиг. 6
w
M
1S3
фиг. 9
(риг.П
