СО О) 00
со
11
Изобретение относится к cnocodaj i реконструктивной вычислительной то мографии на основе явления ядерного магнитного резонанса (ЯМР) и предназначено для количественных интро™ скопических исследований различных сред, результаты которых используют ся в целях медицинской диагностики и неразрушающего контроля.
Цель изобретения повышение точности исследования.
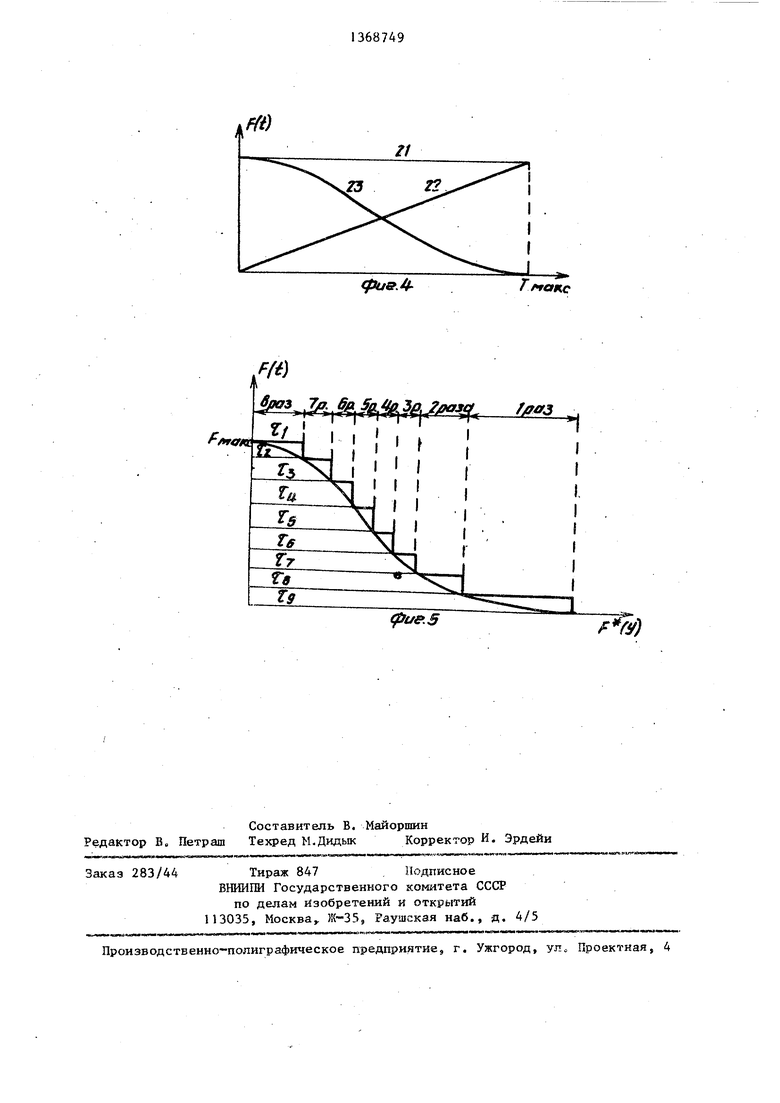
На фиг. 1 представлена структурна схема устройства для реализации способа; на фиг. 2 - сигналы в основных точках устройства для первого сканирования; на фиг. 3 - сигналы в основных точках устройства при реализации способа для целевой функции исследования, соответствующей минимуму сред неквадратичной ошибки; на фиг. 4 - вид возможных целевых функций исследования; на фиг. 5 аппроксимация функции оптимального распределения общего времени наблюдения частей эхо сигнала,
Устройство содержит блок 1 электромагнитных катушек, включающий катушку основного магнитаэ радиочастот кую катушку и катушки создания гради ентсв магнитного поля по осям Х, Y и Z и предназначенный для помещения во внутреннее 11 ространство исследуемого объекта, блок 2 угЕравления катушкой основ.ного магнита, предназначенный для поддержания напряженности поля за,цанной величины, блок 3 у-правления градиентами магнитного поля вдоль . осей X, Y и Z, пассивный коммутатор
4, представляющий собой сборку диодов, сопротивление которой зависит от подводимого к ней напряжения, и предназначенный для защиты входных цепей приемника 5 от мощных импуль- сов передатчика, коммутатор включен радиочастотной катушкой, приеьз- нкком 5 и передатчиком, аналого-циф ровой преобразователь 6 соединенньш с выходом приемника 5,, буферную по лупроводниковую память 7, предназна-™ ченнуто для запоминания оцифрованных экосигналов и включенную между анало го цифровым преобразователем 6, блоком ЭВМ 8, полутоновым дисплеем 9, и блоком 5 О формирования интервалов возбуждения эхосигналов.
Причем выход блока 10 формирова ния интервалов возбуждения эхосигна лов соединен с программируемым генератором 11 импульсов, один выход которого соединен с тактовым входом аналого-цифрового преобразователя 6, а другой - с входом блока 12 управления передатчиком, выход которого соединен с входом передатчика 13. По выходным интерфейсам ЭВМ 8 соединена с блоком 0 формирования интервалов возбуж,а,ения эхосигналов, полутоновым дисплеем 9s предназначенным для визуализации полученных изображений, и блоком 14 формирования градиентов магнитного поля, выходы X, Y и Z которого соединены с многоканальным цифроаналоговым преобразователем 15, аналоговые выходы которого соединены с блоком 16 предварительного усиления, выходы X, Y и Z которого сое
динены с блоком 3 управления гради ентами магнитного поля.
Способ осуществляют следующим образом.
Выбирают метод получения изобра- жения, например однослойную реконструкцию по линейным интегралам. Помещают объект исследования в блок магнитных катушек и фиксируют его там.
Выбирают плоскость исследуемого сечения Пересылают из ЭВМ 8 в блок 14 формирования градиентов магнитного поля координаты наклона плоскости исследуемого сечения. Е блоке 14 формирования градиентов вырабатьшают значения.градиентов по осям Х, Y и Z, соответствующи.е ориентации выбранной плоскости и различным направления проецирования. Значения градиентов, соответствующие первому углу проеци- рования, поступают в цифроаналоговый преобразователь 15, где переходят в аналоговую , усиливаются блоком 16 предварительного усиления и посту- пают в блок 3 управления градиентами магнитного поля, с выхода которого поступают на катушки градиентов магнитного поля блока 1 злектромагнк .гных катушек.
Одновременно в блок 10 формирования интервалов возбуж,цения радиочас- тотшзтх кмпульсов подается команда из ЭВМ ка формирование последовательно- ст й радиоимпульсов с равноотстоящими имлульсами возбуждения эхоскгналов, С выхода блока О формирования кнтер- Балов сформированная последовательность загружается в программируемый генератор 1 импульсов с выхода ко-
торого по команде от ЭВМ 8 поступает в блок 12 управления передатчиком, где выраба ываются радиоимпульсы требуемой частоты и огибающей, которые поступают в блок передатчика 13, где усиливаются, и через пассивный коммутатор 4 поступают на радиочастотную катушку блока 1 электромагнитных катушек.
Одновременно с этим программируемый генератор 11 импульсов начинает вырабатывать тактовые импульсы, поступающие на тактовый вход аналого- цифрового преобразователя 6. По приходу этих импульсов в аналого-цифровом преобразователе 6 происходит оцифровка сигналов, воспринятых радиочастотной катушкой как отклик объекта на электромагнитное возмущение и усиленных приемником 5, Оцифрованные сигналы запоминаются в блоке полупроводниковой буферной памяти 7.
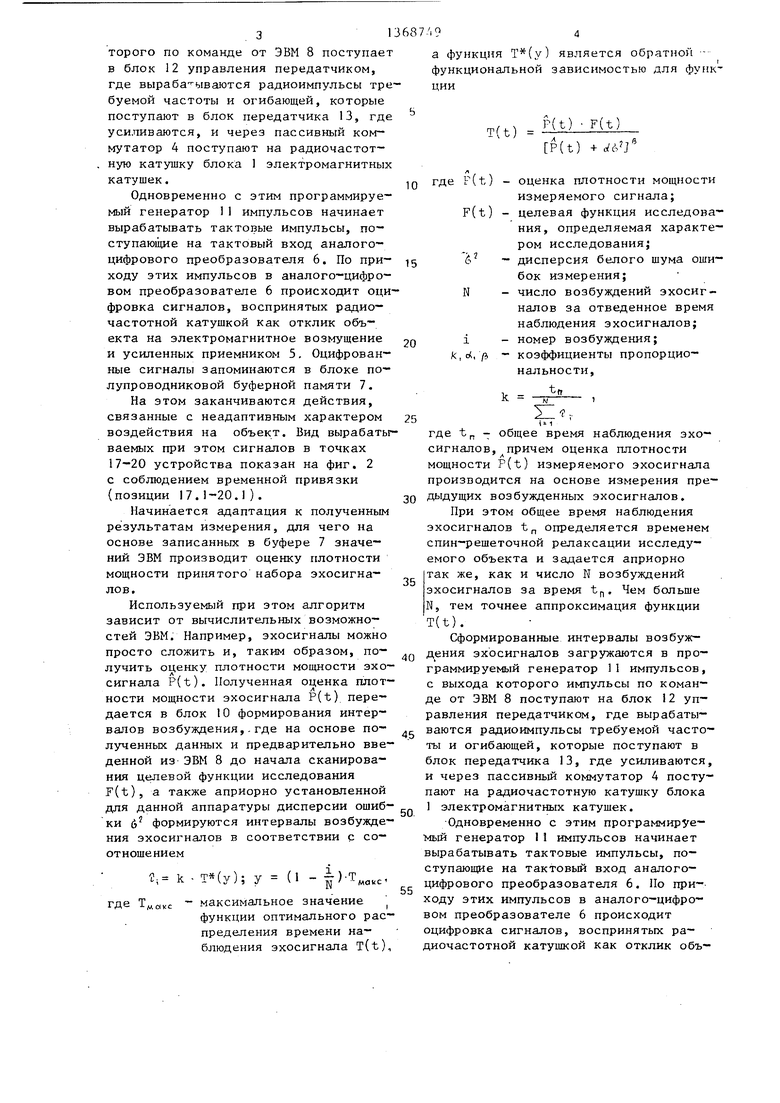
На этом заканчиваются действия, связанные с неадаптивным характером воздействия на объект. Вид вырабатываемых при этом сигналов в точках 17-20 устройства показан на фиг. 2 с соблюдением временной привязки (позиции 17.1-20.1).
Начинается адаптация к полученным результатам измерения, для чего на основе записанных в буфере 7 значений ЭВМ производит оценку плотности мощности принятого набора эхосигна- лов.
Используемый при этом алгоритм зависит от вычислительных возможностей ЭВМ. Например, эхосигналы можно просто сложить и, таким образом, получить оценку плотности мощности эхо- сигнала P(t). Полученная оценка плотности мощности эхосигнала P(t) передается в блок 10 формирования интервалов возбуждения,.где на основе полученных данных и предварительно введенной из ЭВМ 8 до начала сканирования целевой функции исследования F(t), а также априорно установленной для данной аппаратуры дисперсии ошиб
ки 6 формируются интервалы возбужде
ния эхосигналов отношением
в соответствии с со-
, k.T(y); у (1 - |)-т,,
максимальное значение
функции оптимального распределения времени наблюдения эхосигнала T(t),
а функция Т(у) является обратной - функциональной зависимостью для функции
T(t)
P(t) F(t) P(t)
где
P(t) - F(t) k, o(,
k
оценка плотности мощности измеряемого сигнала; целевая функция исследования, определяемая характером исследования; дисперсия белого щума ошибок измерения; число возбуждений эхосиг- налов за отведенное время наблюдения эхосигналов; номер возбуждения; коэффициенты пропорциональности,
tft
25
0
5
где
tn общее время наблюдения эхо- сигналов, причем оценка плотности мощности P(t) измеряемого эхосигнала производится на основе измерения предыдущих возбужденных эхосигналов.
При этом общее время наблюдения эхосигналов t определяется временем спин-решеточной релаксации исследуемого объекта и задается априорно так же, как и число N возбуждений эхосигналов за время t. Чем больше
0
N, тем точнее аппроксимация функции T(t).
Сформированные интервалы возбуждения эхосигналов загружаются в программируемый генератор 11 импульсов, с выхода которого импульсы по команде от ЭВМ 8 поступают на блок 12 управления передатчиком, где вырабаты- g ваются радиоимпульсы требуемой частоты и огибающей, которые поступают в блок передатчика 13, где усиливаются, и через пассивный кО1 4утатор 4 поступают на радиочастотную катушку блока 1 электромагнитных катушек.
Одновременно с этим программируемой генератор 11 импульсов начинает вырабатывать тактовые импульсы, поступающие на тактовьй вход аналого- цифрового преобразователя 6. По приходу этих импульсов в аналого-цифровом преобразователе 6 происходит оцифровка сигналов, воспринятых радиочастотной катушкой как отклик объ-
5
екта на электромагнитное возм1, щеиие и усиленных приемником 5, Оцифрованные сигналы запоминаются в блоке полупроводниковой буферной памяти 7„ На этом заканчивается сбор информа 1Ц1И в адаптивном режиме для одной проекции.
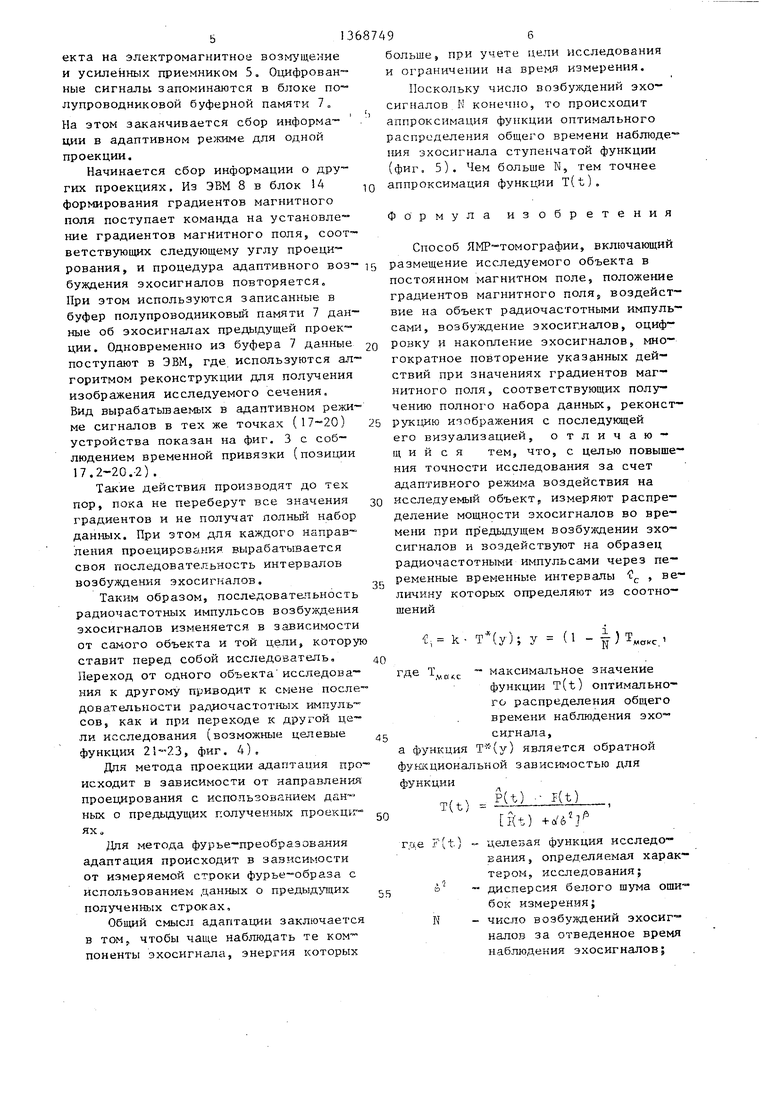
Начинается сбор информации о дру гих проекциях. Из ЭВМ 8 в блок 4 формирования градиентов магнитного поля поступает команда на установление градиентов магнитного поля, соответствующих следующему углу проеци рования, и процедура адаптивного воз буждения эхосигналов повторяется. При этом используются записанные в буфер полупроводниковьш памяти 7 данные об эхосигналах предыдущей проекции. Одновременно из буфера 7 данные поступают в ЭВМ, где используются алгоритмом реконструкции для получения изображения исследуемого сечения. Вид вырабатьгоаегфгх в адаптивном режиме сигналов в тех же точках () устройства показан на фиг. 3 с соблюдением временной привязки (позиции 17.2-20.-2).
Такие действия производят до тех пор, пока не переберут все значения градиентов и не получат полный набор данных. При этом для каж,цого направ Ленин проецирования вырабатывается своя последовательность интервалов возбуждения эхосигкалов.
Таким образом, последовательность радиочастотных импульсов возбуждения эхосигналов изменяется в зависимости от самого объекта и той цели, котору
ставит перед собой исследователь, Переход от одного объекта исследования к другому приводит к смене последовательности раАИочастот1шх импуль- сов, как и при переходе к другой це ли исследования (возможные целевые функции .3, фиг. 4) ,
Дпя метода проекции адаггтация происходит в зависимости от направления проецирования с использованием дан - ных о предыдущих полученных проекци™ ях..
Для метода фурье-преобразования адаптация происходит в зависимости от измеряемой строки фурье-образа с использованием данных о предыдущих полученных строках.
Общий смысл адаптации заключается в том чтобы чаще наблюдать те ком поненты эхосигнала, энергия которых
10
if, 2087496
больше, при учете цели исследования и ограничении на время измерения.
Поскольку число возбуждений эхо- сигналов К конечно, то происходит аппроксимация функции оптимального распределения общего времени наблюде НИН эхосигнала ступенчатой функции (фиг. 5). Чем больше N, тем точнее аппроксимация функции T(t).
Формула изобретения
Способ ЯМР -томографии, включающий размещение исследуемого объекта в постоянном магнитном поле, положение градиентов магнитного поля, воздействие на объект радиочастотными импульсами, возбуждение эхосигналов, оцифровку и накопление эхосигналов, многократное повторение указанных действий при значениях градиентов магнитного поля, соответствующих получению полного набора данных, реконст- рукцию изображения с последующей его визуализацией, отличающийся тем, что, с целью повышения точности исследования за счет адаптивного режима воздействия на исследуемый объект, измеряют распределение мощности эхосигналов во времени при предыдущем возбуждении эхо- сигналов и воздействуют на образец радиочастотными импульсами через переменные временные интервалы , величину которых определяют из соотношений
k- Т(у); у (1 - 4) Т
N
мокс
5
где Т,
максимальное значение функции T(t) оптимального распределения общего времени наблюдения эхо- сигнала,
а функция Т(у) является обратной фуш ;циональной зависимостью для функции
P(t) . P(t)
0
T(t) ) f. 6
гт/ь
)
цел.еБая функция исследования, определяемая характером, исследования;
- дисперсия белого шума бок измерения;
- число возбуждений эхосиг налов за отведенное время наб.шодения эхосигналов;
71368749
номер возбуждения;где t,,
коэффициенты пропорциоН,-;ЛЬНОСТИ, tr,
N .
P(t
8
общее время сбора эхосигналов;
величина распределения мощности эхосигнала во времени.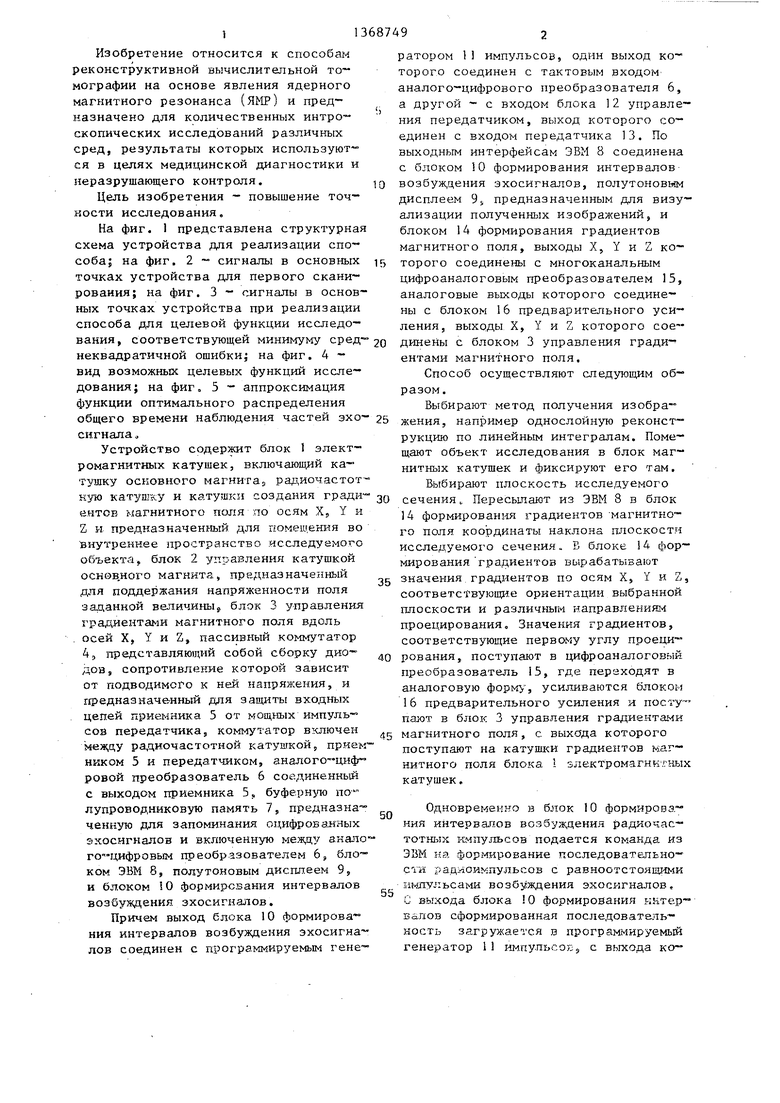
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ЯМР-томографии | 1986 |
|
SU1368752A1 |
| Способ ЯМР-томографии | 1988 |
|
SU1702271A1 |
| Способ томографии на основе ядерного магнитного резонанса | 1987 |
|
SU1543317A1 |
| Устройство для ультразвукового измерения размеров глаза | 1986 |
|
SU1510842A1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2016 |
|
RU2645909C1 |
| СПОСОБ НАКОПЛЕНИЯ МР-ТОМОГРАММЫ ОТ ОБЪЕКТА, ИСПЫТЫВАЮЩЕГО СЛУЧАЙНЫЕ ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2038586C1 |
| МАГНИТНО-РЕЗОНАНСНАЯ ВИЗУАЛИЗАЦИЯ С РАЗДЕЛЕНИЕМ ВОДА/ЖИР МЕТОДОМ ДИКСОНА | 2018 |
|
RU2773486C2 |
| Способ измерения распределения постоянного магнитного поля в ЯМР-томографе | 1989 |
|
SU1712845A1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2018 |
|
RU2679630C1 |
| КОЛЕБАТЕЛЬНЫЙ АППЛИКАТОР ДЛЯ МР-РЕОЛОГИИ | 2013 |
|
RU2638094C2 |
Изобретение относится к способам вычислительной томографии на основе явления ядерного магнитного резонанса и предназначено для интроско- пических исследований в целях медицинской диагностики и неразрушающего контроля. Целью изобретения является повышение точности исследований. Сущность изобретения состоит в том, что возбуждение эхосигналов зависит от самих эхосигналов и цели проводимого исследования.. Б результате происходит адаптивное накопление зхосигна- лов, учитывающее оценку распределения плотности мощности эхосигналов и распределение информационной ценности эхосигнала, задаваемой исследователем в виде целевой функции исследования . 5 ил. (Л
/3
т
-
Ж.
1
/7/
ILz
Jl
1
9СГ ВО
1
1
1
Ш 780 J80
ГвО
/11 1 I A i
zo.r
J|f-«vM/ - 4/ --«vA-V4 V W
фиг. 2
/5
2Q
лк, v
i
1
1
780 J80
ГвО
срие.З
Uggg. fA 5 I I I
(fJU9,
Г/чацс
(.5
vy;
| Лундин А | |||
| Г., Федин Э | |||
| И | |||
| Ядерный магнитный резонанс | |||
| Основы и применения | |||
| - Новосибирск: Наука, 1980, с | |||
| Прибор для запора стрелок | 1921 |
|
SU167A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| X | |||
| и др | |||
| Термография на ядерном магнитном резонансе с преобразованием Фурье | |||
| - ТИИЭР, 1982, т | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
