Изобретение относится к способам реконструктивной вычислительной томографии на основе ядерного магнитного резонанса (ЯМР) и предназначено для количественных интрoскопических исследований различных сред, результаты которых используются в целях медицинской диагностики и неразрушающего контроля.
Наиболее распространенная модификация этого способа состоит в следующем. Изучаемый объект в однородном магнитном поле подвергается воздействию импульсной последовательности, поочередно подаются:
1) 90о-ный радиочастотный импульс при наличии селективного градиента магнитного поля по оси Z;
2) фазокодирующий градиент магнитного поля по оси Y (циклически изменяемый по амплитуде после запуска очередного 90о-ного радиоимпульса),
3) 180о-ный импульс или используют знакопеременные градиенты для формирования сигнала спинового эха,
4) частотокодирующий градиент магнитного поля по оси Х с одновременной цифровой регистрацией эхо-сигнала.
При периодической подаче указанных импульсных последовательностей осуществляется построчное накопление цифровой рабочей матрицы, которая далее с помощью двумерного преобразования Фурье преобразуется в матрицу-изображение.
К недостаткам способа относится необходимость достаточно длительного пребывания пациента (порядка десятков минут) без движения, поскольку последние резко ухудшают качество изображения. Для уменьшения искажений томографических изображений из-за движения пациента предложены способы, которые позволяют уменьшить негативные последствия.
Для повышения качества изображения предложено в процессе сканирования изменять величину фазокодирующего градиента по оси Y не по линейному закону, а по закону случайных чисел [1] Недостатком этого способа является лишь частичное улучшение качества изображения.
Наиболее близким аналогом к предложенному является способ [2] в котором наблюдают за движением пациента с помощью катушки, включенной в схему измерения импеданса, например в мостовую схему, подключенную к высокочастотному генератору. Его частота превышает частоту Лармора, на которой работает МР-томограф, чем частично снижается взаимное влияние частот. Величина импеданса зависит от положения тела пациента. Контрольная катушка расположена так, что она наводит минимальную ЭДС в основных радиочастотных катушках МР-томографа. Изменение величины импеданса связано с изменением положения тела пациента. Поэтому при накоплении томограммы требуется осуществлять контроль за импедансом, а при его существенном изменении процесс накопления томограммы требуется осуществлять заново.
Недостаток этого способа состоит в том, что по импедансу встроенной катушки регистрируется лишь сам факт перемещения тела пациента, хотя разнонаправленные перемещения тела вызывают одни и те же изменения импеданса контрольной катушки.
Изобретение позволяет учитывать разнонаправленные перемещения и обеспечивает необходимое быстродействие. При осуществлении способа помещают исследуемый объект в магнитное поле и воздействуют импульсными последовательностями, дополнительно производя следующие операции:
а) перед началом накопительного процесса фиксируют положение исследуемого объекта;
б) проводят построчное накопление рабочей матрицы и контролируют положение исследуемого объекта с помощью анализа ЯМР-сигналов от контрольных образцов после регистрации каждой строки матрицы;
в) в случае изменения частот и амплитуд контроля ЯМР-сигналов, возникающих из-за случайных перемещений, производят корректировку параметров, обеспечивающих распределение токов в градиентных обмотках, и повторно накапливают цифровую информацию о последней строке.
В способе накопления повышается быстродействие получения томограммы, поскольку при корректировке токов в градиентных катушках после регистрации перемещения не требуется начинать накопление томограммы заново, а достаточно продолжить накопление с предшествующей строки.
Известно, что положение тела в пространстве будет однозначно определено, если известны координаты трех принадлежащих этому телу точек. Поэтому для слежения за случайными перемещениями исследуемого объекта в измерительном пространстве томографа в период накопления достаточно использовать три контрольных датчика. Датчики, регистрирующие положение тела, могут строиться на любом известном физическом принципе, пригодном для этой цели.
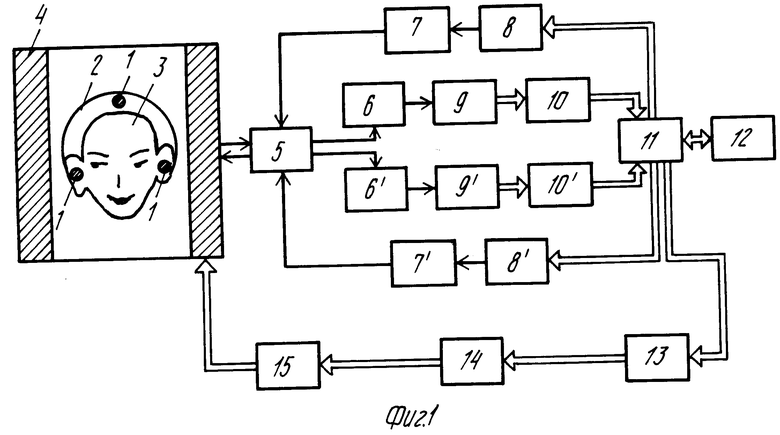
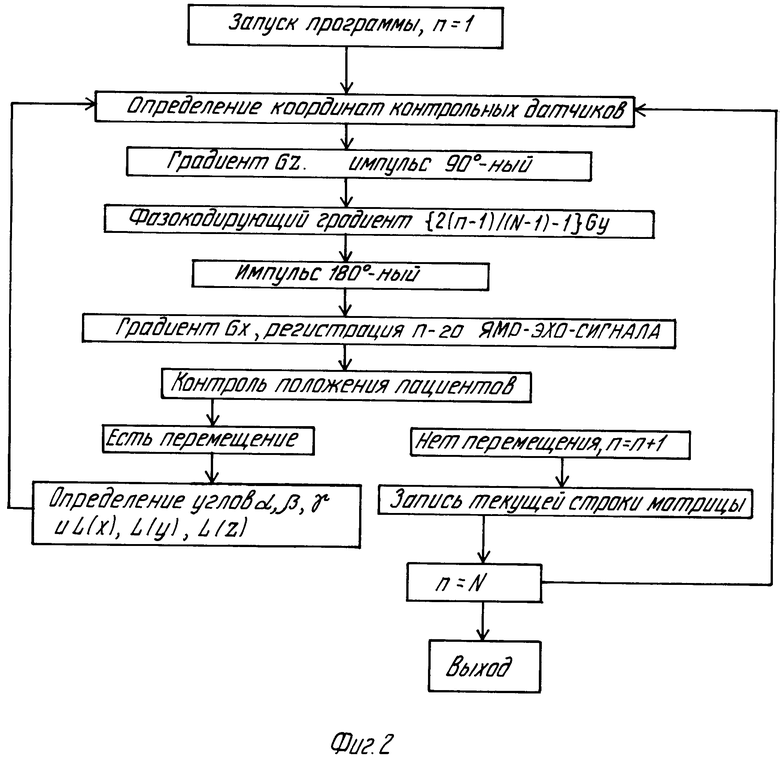
На фиг. 1 представлена блок-схема устройства для реализации способа; на фиг. 2 показана последовательность операций при накоплении рабочей матрицы размером NxN.
Устройство содержит датчики 1, вмонтированные в держатель 2, который устанавливают на объект 3 (например, на голову пациента), блок электромагнитных катушек 4, включающий катушку основного магнита, радиочастотную катушку и катушки создания линейных и нелинейных градиентов магнитного поля, устройство 5, согласующее радиочастотную катушку на два усилительно-преобразовательных модуля, усилитель 5 ЯМР-сигналов, формирователь 7 радиочастотных импульсов возбуждения ЯМР-сигналов, формирователь 8 видеоимпульсов, аналого-цифровой преобразователь 9, буфер памяти 10, блоки 6', 7', 8', 9', 10' для контрольного ЯМР-сигнала аналогичны блокам 6-10 для основного ЯМР-сигнала, ЭВМ 11, дисплей 12, многоканальный цифроаналоговый преобразователь 13, блок усилителей 14, блок управления 15 токами магнитной системы. Способ включает в себя следующие последовательности операций:
запуск программы при n 1; определение координат контрольных датчиков; подачу градиента GZ и одновременно 90о-ного импульса; подачу фазокодирующего градиента [2(n-1)/(N-1) 1]Gy; подачу 180о-ного импульса; подачу градиента Gx и регистрацию n-ного ЯМР-эхо-сигнала; контроль положения пациента, если:
а) перемещение обнаружено, то производится определение углов α, β, γ и параметров L(x), L(y), L(z), которые описывают неравенство токов, протекающих в левых и правых градиентных намотках, определяют новые значения токов и переходят к определению координат контрольных датчиков;
б) перемещение на обнаружено, то производится запись текущей строки накапливаемой рабочей матрицы, затем проверяется выполнение условия n N. Если это условие не выполняется, то наступает переход к определению координат контрольных датчиков по его завершению процесс накопления рабочей матрицы заканчивается.
Таким образом, от аналогов способ отличается наличием следящей системы, однозначно регистрирующей движения объекта при его винтообразных случайных перемещениях с внесением необходимых корректировок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕРФЕРЕНЦИОННЫЙ СФЕРОМЕТР | 1992 |
|
RU2037768C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТЕЙ В ГАЗОВЫХ И ЖИДКОСТНЫХ ОБЪЕМАХ | 1995 |
|
RU2101711C1 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ПРОЗРАЧНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2088904C1 |
| РАДИОИНТРОСКОП | 1989 |
|
RU2018811C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ КОНТРОЛЯ ГЕОМЕТРИЧЕСКОГО РАСПОЛОЖЕНИЯ ЛИНЗ И ИНТЕРФЕРЕНЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2078305C1 |
| ОТРАЖАТЕЛЬ ФОТОЭЛЕКТРИЧЕСКОГО АВТОКОЛЛИМАЦИОННОГО УГЛОМЕРА | 1991 |
|
RU2054621C1 |
| Устройство для определения профиля поверхности немагнитных объектов | 1987 |
|
SU1490480A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ КЛИНОВИДНЫХ ОБРАЗЦОВ | 1989 |
|
RU2032166C1 |
| ОПТИЧЕСКИЙ ПРОГИБОМЕР | 1993 |
|
RU2077701C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2086913C1 |
Использование: для количественных интроскопических исследований различных сред, результаты которых используются в целях медицинской диагностики и неразрушающего контроля. Сущность изобретения: после помещения исследуемого объекта в магнитное поле осуществляют однозначную фиксацию его положения в исследовательском пространстве томографа с помощью контрольных датчиков. Затем осуществляют построчное накопление цифровой рабочей матрицы при постоянном контроле положения исследуемого объекта. В случае изменения частот контрольных ЯМР-сигналов, возникающих из-за случайных перемещений, производят корректировку параметров, обеспечивающих распределение токов в градиентных обмотках, и повторно накапливают цифровую информацию о последней строке числовой рабочей матрицы. 2 ил.
СПОСОБ НАКОПЛЕНИЯ МР-ТОМОГРАММЫ ОТ ОБЪЕКТА, ИСПЫТЫВАЮЩЕГО СЛУЧАЙНЫЕ ПЕРЕМЕЩЕНИЯ, на основе ядерного магнитного резонанса, заключающийся в наложении на объект постоянного магнитного поля и линейных градиентов магнитного поля, возбуждении эхо-сигналов от спинов различных участков исследуемого объекта с помощью резонансных радиоимпульсов и импульсных линейных градиентов магнитного поля, регистрации эхо-сигналов, регистрации перемещения исследуемого объекта, построчном накоплении числовой матрацы, содержащей информацию о строении объекта, математической обработке числовой матрицы с последующей визуализацией исследуемого объекта, отличающийся тем, что предварительно объект с прикрепленными охватывающими контрольными датчиками помещают в ЯМР-томограф и регистрируют исходные сигналы от контрольных датчиков, после возбуждения эхо-сигналов последовательно регистрируют эхо-сигналы исследуемого объекта и сигналы контрольных датчиков, по изменению сигналов от контрольных датчиков судят о перемещении исследуемого объекта, корректируют при наличии перемещения магнитное поле и направление градиентов, повторно регистрируют сигналы исследуемого объекта и контрольных датчиков, в накопление итоговой матрицы изображения МР-томограммы осуществляют построчно при условии постоянства сигналов от контрольных датчиков.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ N 3510195, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
