т
G
8
со
с ;о
Изобретение относится к двигателе строенкю и может быть использовано для диагностирования технического состояния двигателей.
Цель изобретения - повышение точности измерения путем исключения зависимости точности измерения от неравномерности вращения вала двигателя на каждом обороте и использования более совершенного алгоритма форми- рования эквивалентов времени.
На чертеже представлена функциональная схема устройства.
Устройство содержит датчик 1 начала процесса впрыска топлива, датчик 2 верхней мертвой точки поршня двигателя, первый формирователь 3 импульсов, второй формирователь 4 импульсов, блок 5 вычисления, индикатор 6, датчик 7 угловых положений, третий формирователь 8.
Датчик 1 начала процесса впрыска топлива, датчик 2 верхней мертвой точки поршня двигателя, датчик 7 угловых положений Соединены через первый, второй и третий формирователи 3,4,8 импульсов соответственно с первым, вторым и третьим регистрами состояния внешних устройств блока 5 вычисления. Выход блока 5 вычисления соединен с входом индикатора 6.
Датчик 1 начала процесса впрыска предназначен для генерирования электрического сигнала в момент начала впрыска топлива. Датчик 2 верхней мертвой точки поршня двигателя предназначен для генерирования электрического сигнала в момент нахождения поршня в верхней мертвой точке (ВМТ) Датчик 7 угловых положений используется для генерирования электрического сигнала через известный дискретный угол поворота вала двигателя. Формирователи 3,4,8 импульсов предназначены для нормирования сигналов от датчиков 1,2,7 соответственно по амплитуде и фронту. Блок 5 вычисления предназначен для формирования эквивалентов времени и обработки данных. Индикатор 6 используется для
индицирования результатов измерения.
I
Устройство работает следующим образом.
.Блок 5 вычисления (БВ) работает по жесткой программе, заложенной в его постоянном запоминающем устройстве. В начале измерения БВ 5 анали1
зирует третий регистр состояния (РСЗ), к которому подключен выход третьего формирователя 8. Так как на выходе третьего формирователя 8 сигнал нулевого уровня, то РСЗ находится в нулевом состоянии, а БВ 5 - в зацикленном на опрос РСЗ состоянии.
При вращении вала двигателя срабатывает датчик 7 угловых положений,, в результате чего третий формирователь 3 формирует нормированный импульс, длительность которого такова, что БВ 5 за это время успевает сделать
только 1 цикл обращения к РСЗ.Во время этого импульса РСЗ находится в единичном состоянии. БВ 5 выходит из зацикленного на опрос состояния и начинает формировать временные эквиваленты.
Переменной N (предварительно об- нуленной) БВ 5 присваивает значение N+1. Далее БВ 5 анализирует состояние первого регистра состояния (РС1),
к которому подключен выход первого формирователя 3. Поскольку на выходе первого формирователя 3 сигнал нулевого уровня, то БВ 5 переходит на анализ состояния РСЗ. Так как последНИИ также не установлен, то БВ 5 переходит на прибавление к переменной.
Таким образом, БВ 5 работает до тех пор, пока РС1 или РС2 не будут
находиться в единичном состоянии. Если первым в единичное состояние устанавливается РСЗ, т.е. впрыска топлива за время поворота вала на угол между двумя соседними импульсами с
датчика 7 угловых положений не происходит, то БВ 5 записывает значение переменной N в оперативное запомина- ющее устройство, обнуляет переменную N и начинает формировать новый эквивалент времени между двумя следующими импульсами с датчика 7 угловых положений.
Если в единичное состояние устанавливается РС1, что происходит во
время начала впрыска топлива, и первый формирователь 3 формирует импульс, во время которого РС1 находится в единичном состоянии, то БВ 5 выходит из цикла формирования эквивалента и
записывает значение переменной N в оперативное запоминающее устройство. Далее БВ 5 продолжает формирование эквивалентов времени поворота аналогичным образом с той лишь разницей, что во время формирования проводится опрос состояния второго регистра состояния РС2, к которому подключен выход второго формирователя 4,, а не PC 1. При этом во внутреннем оперативном запоминающем устройств БВ 5 последовательно записываются значения эквивалентов времени поворота вала между соседними импульсами ю с датчика 7 угловых положений. Когда срабатывает датчик 2 верхней мертвой точки, второй формирователь 4 формирует импульс, во время которого РС2 находится в единичном состоянии. 15 БВ 5 выходит из цикла формирования эквивалента и записывает значение переменной N во внутреннее оперативное запоминающее устройство. Далее БВ 5 продолжает формирование эквивалента 20 аналогичным образом, т.е. путем прибавления единицы к переменной и анализа состояния РСЗ. Когда последний устанавливается в единичное состояние, т.е. срабатывает датчик 7 угло- 25 вых положений, БВ 5 выходит из цикла формирования эквивалентов и приступает к расчету измеряемого параметра, который осуществляется следующим образом.
БВ 5 находит в оперативном запоминающем устройстве значение переменной NJ, которая представляет собой цифровой эквивалент времени поворота вала на угол между двумя соседними импульсами с датчика 7 угловых положений во время поворота, на который происходит впрыск топлива, и загде
N:
цифровой эквивалент времени поворота вала на угол от момента срабатывания датчика 7 угловых положений до момента срабатьшания датчика 3 верхней мертво11 точки порщня;
Мр - цифровой эквивалент времени поворота вала на угол между двумя соседними срабатываниями датчика 7 угловых положений,
причем во время этого поворота срабатывает датчик 2 верхней мертвой точки поршня. БВ 5 рассчитывает количество записей в оперативном запоминающем устройстве, которое происходит от момента записи эквивалента Nj до момента записи эквивалента N и рас- считывает уголс Ч , 9-К,
где К 30
количество записей в оперативном запоминающем устройстве от момента записи эквивалента N до момента записи эквивалента N.
Далее БВ 5 рассчитывает измеряемый угол Ср, по формуле
, + t;,+ cf,
и выводит значение на индикатор 6. Работа устройства повторяется. Таким образом, обеспечивается непрерывное измерение угла в реальном масштабе времени.
Предлагаемое изобретение позволяет ставляет собой эквивалент времени по- до повысить точность измерения угла опе35
писанный эквивалент Ni, который предворота вала от импульса с датчика 7 угловых положений до момента срабатывания датчика 1 начала впрыска. / БВ 5 рассчитывает первый угол q, по формуле
режения впрыска топлива, так как устройство обеспечивает снижение динамической погрешности процесса измере- . ния без применения сложных внешних с устройств, используемых для формирования эквивалентов времени, упрощает алгоритм работы, при этом повышается надежность.
Ч,
Nt-N g
N
t
где
N:
цифровой эквивалент времени поворота вала на угол от момента срабатывания датчика 7 угловых положений до момента срабатьшания датчика 3 верхней мертво11 точки порщня;
Мр - цифровой эквивалент времени поворота вала на угол между двумя соседними срабатываниями датчика 7 угловых положений,
причем во время этого поворота срабатывает датчик 2 верхней мертвой точки поршня. БВ 5 рассчитывает количество записей в оперативном запоминающем устройстве, которое происходит от момента записи эквивалента Nj до момента записи эквивалента N и рас- считывает уголс Ч , 9-К,
где К ю15 20 25
30
35
режения впрыска топлива, так как устройство обеспечивает снижение динамической погрешности процесса измере- ния без применения сложных внешних устройств, используемых для формирования эквивалентов времени, упрощает алгоритм работы, при этом повышается надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1985 |
|
SU1326765A1 |
| Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1985 |
|
SU1355748A2 |
| Устройство для диагностики дизелей | 1986 |
|
SU1379675A1 |
| Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1985 |
|
SU1280177A2 |
| Устройство для измерения угла опережения подачи топлива в двигатель внутреннего сгорания | 1985 |
|
SU1286925A1 |
| Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1984 |
|
SU1211440A1 |
| Устройство для измерения угла опережения подачи топлива в дизель | 1986 |
|
SU1343274A2 |
| Устройство для диагностики дизельного двигателя | 1984 |
|
SU1208294A1 |
| Устройство для измерения угла опережения подачи топлива в дизель | 1986 |
|
SU1413474A1 |
| Устройство для измерения угла поворота коленчатого вала двигателя внутреннего сгорания | 1985 |
|
SU1334056A1 |
Изобретение позволяет повысить точность измерения. Устройство содержит датчики 1, 2 начала процесса впрыска топлива и верхней мертвой точки, формирователи 3,4,8 импульсов, блок 5 вычисления, индикатор 6, датчик 7 угловых положений. Датчик 7 генерирует электрический сигнал через известный дискретньй угол поворота вала двигателя. Формирователи импульсов нормируют сигналы от датчиков 1,2,7 соответственно по амплитуде и фронту. При измерении угла опережения обеспечивается снижение динамической погрешности процесса измерения без применения сложных внешних устройств. Точность измерения не зависит от неравномерности вращения вала двигателя на каждом обороте. 1 ил. о 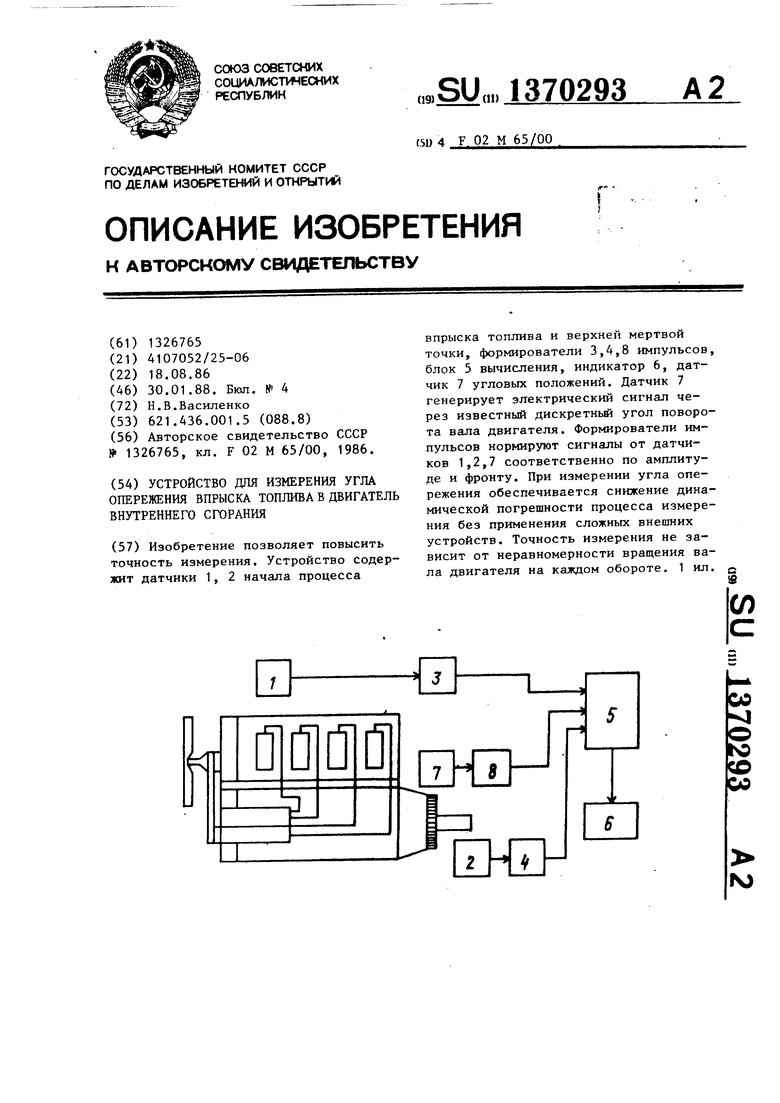
.где В - величина угла между двумя
соседними импульсами датчи-- ка 7 угловых положений. Далее БВ 5 аналогичным образом рассчитьшает угол (f на участке измерения, где срабатьшает датчик 2 верхней мертвой точки
...
50
Формула изобретения
Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания по авт. 55 св. № 1326765, отличающееся тем, что, с целью повьш1ения точности измерения, оно дополнительно снабжено датчиком угловых положений и третьим формирователем, причем
51370293в
датчик угловых положений подключен ствуклцему регистру состояния внешних через .третий формирователь к соответ- устройств блока вычисления.
| Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1985 |
|
SU1326765A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
