ел
со
vj
о со ел
креста 9, В первую половину такта движения мальтийского креста 6 происходит интенсивный разгон инерционной массы 7 с переходом потенциальной энергии упругого элемента (пружины) 12 в кинетическую энергию инерционной массы. Во вторую половин такта движения происходит торможение мальтийского креста 6 с обратным переходом кинетической энергии инерционной массы в промежуточную энергию упругого элемента 12, который при этом деформируется в сторону, противоположную первоначальной.
Мальтийский крест 6 фиксируется от перемещения зубом 15. При дальнейшем вращении ведущего вала 2 палец 5 заходит в паз другого мальтийского креста 9 и поворачивает его аналогично циклу движения креста 6. Конструкция мальтийского механизма за счет использования энергии предварительно деформированного упругого элемента 12 позволяет снизить ударные нагрузки на детали механизма, а энергия привода расходуется лишь на преодоление сил трения в опорах, на упругом элементе 12 и на его подзарядку. 1 з.п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Устройство прерывистого вращения | 1984 |
|
SU1178995A1 |
| Мальтийский механизм кинопроектора | 1975 |
|
SU609936A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 2006 |
|
RU2304242C1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ | 1992 |
|
RU2023919C1 |
| Мальтийский механизм | 1985 |
|
SU1305481A1 |
| Мальтийский механизм | 1983 |
|
SU1126745A1 |
| Мальтийский механизм | 1986 |
|
SU1388638A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Устройство для подачи прокладчиков уточной нити ткацкого станка с волнообразно подвижным зевом | 1977 |
|
SU749955A1 |
Изобретение относится к общему машиностроению. Цель изобретения - повьшение надежности механизма путем уменьшения ударных нагрузок и снижение энергозатрат на привод за счет использования энергии деформированного упоругого элемента. При входе пальца 4 в паз мальтийского креста 6 происходит поворот последнего относительно неподвижного мальтийского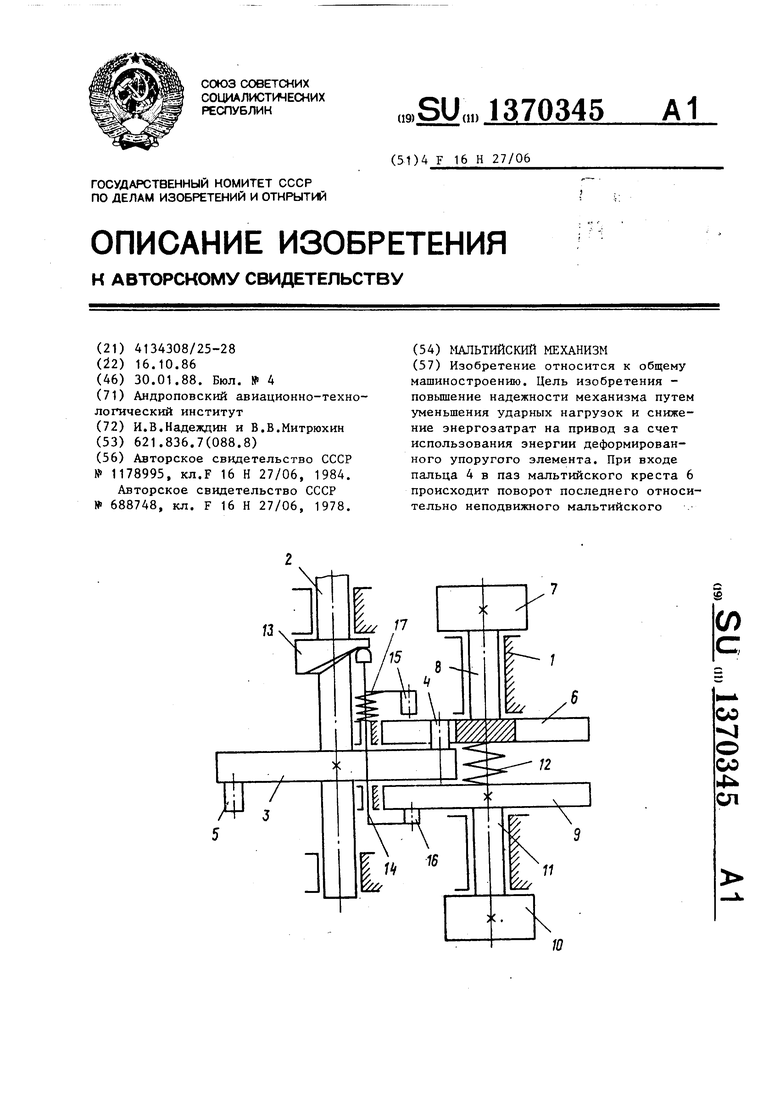
1 Изобретение относится к общему
машиностроению и может быть использовано в различных устройствах для обеспечения вращения исполнительных элементов, обладающих больщой инерци ей, с периодическими остановками.
Цель изобретения - повышение надежности механизма путем уменьшения ударных нагрузок и снижение энергозатрат на привод за счет использова- вания энергии деформируемого упругого элемента.
На чертеже изображен мальтийский механизм, общий вид.
Мальтийский механизм содержит корпус 1, размещенный в корпусе ведущий вал 2, на котором жестко установлен кривошип 3 с пальцами 4 и 5. Палец 4 взаимодействует с мальтий- CKitM крестом 6, соединенным с ведомо инерционной массой 7, размещенной на валу 8, а палец 5 - с мальтийским крестом 9, соединенным с ведомой инерционной массой 10, размещенной на валу 11.
Кресты 6 и 9 соединены между собой с помощью упругого элемента , выполненного в виде пружины 12 кручения,преставляющего собой аккумулятор механической энергии.
Для многопазовых мальтийских крестов, характеризующихся малыми углами деления, целесообразно в качестве аккумулятора механической энергии использовать упругие резиновые эле- менты, которые способны аккумулиро
15
t,
0
5
0
25
вать большее количество энергии на единицу массы, чем пружины кручения (до 10 раз). В этом случае крепление упругого элемента к крестам 6 и 9 осуществляется вулканизацией или склеиванием при монтаже механизма.
Пальцы 4 и 5 развернуты относительно оси ведущего вала с возможностью поочередного взаимодействия с мальтийскими крестами 6 и 9, причем угол разворота пальцев 4 и 5 зависит от заданного коэффициента времени работы механизма, равного отношению времени движения ведомого креста к времени его выстоя, и от условия работоспособности механизма, т.е. поочередного (без интерференции) зацепления пальцев 4 и 5 с пазами крестов 6 и 9. Исходя из последнего условия нижняя граница этого угла должна быть не меньше 211/2 для обоих крестов внешнего зацепления и 2(Z-1)/Z - внутреннего зацепления, где Z - число пазов каждого из крестов 6, 9.
Исполнительные органы (инерционные массы 7 и 10) могут присоединяться как к валам 8 и 11, так и к одному из них. Во втором случае инерционная масса 7 или 10 должна быть эквивалентна массе исполнительного органа. Выходные валы 8 и 11 конструктивно могут быть установлены коаксиально друг другу.
Недеформированному состоянию пружины 12 соответствует положение механизма, при котором мальтийские
кресты 6 и 9 развернуты друг относительно друга таким образом, что углы между осями соседних пазов крестов 6 и 9 составляют JT/Z. Для равных углов поворота последних необходимо, чтобы соблюдалось равенство числа их пазов, В период выстоя крестов 6 и 9 т.е. когда угол между осями пазов соседних мальтийских крестов равен нулю, пружина 12 должна быть заряжена (сжата) и зафиксирована, например с помощью стопорного устройства, состоящего из установленного на ведущем валу 2 торцового кулачка 13, взаимодействующего с толкателем 14, имеющим запирающие зубья 15 и 16, и пружины 17.
Мальтийский механизм работает следующим образом.
В исходном положении мальтийских крестов 6 и 9, соответствующем фазе выстоя, пружина 12 закручена на угол таким образом, чтобы момент сил упругости, действующий, например на кресте 6, совпадал с направлением его вращения. Положение инерционных масс 7 и 10 зафиксировано введением зубьев 15 и 16 в пазы крестов 6 и 9. При вращении ведущего вала 2 палец 4 кривошипа 3 заходит в паз креста 6. Одновременно с этим фиксирующий зуб 15 освобождает крест 6, который под действием момента сил упругости пружины 12 и момента движущих сил, передаваемого через палец 4 от привода (не показан), поворачивается на угол относительно неподвижного креста 9. При этом в первую половину такта движения креста 6, соответствующего углу поворота IT/Z, происходит интенсивный разгон ведомой массы 7. Потенциальная энергия предварительно закрученной пружины 12 переходит в кинетическую энергию ведомой массы 7 При дальнейшем движении креста 6 под действием инерции массы 7 (вторая половина такта движения, равная углу fi/Z) пружина 12 деформируется в противоположном направлении от ее среднего положения, соответствующего недеформированному состоянию. Кинетическая энергия инерционной массы 7 переходит в потенциальную энергию пружины 12 Движение ведомой массы 7 и креста 6 сопровождается интенсивны торможением. Затем палец 4 выходит и мальтийского креста 6, который фиксируется от произвольного поворота
5
5
0
0
5
0
5
0
5
зубом 15 до того момента, пока палец 4 вновь не станет взаимодействовать с пазом креста 6. В этот момент пружина 12 заряжена в обратном направлении.
При дальнейшем движении ведущего вала 2 палец 5 заходит в паз другого мальтийского креста 9, поворачивая его также на угол 2 / /Z. На крест 9 действует момент сил упругости, совпадающий с моментом ДВИЖ1ТЦИХ сил, в то время как на крест 6 действует момент противоположного направления. Пружина 12 в первую половину такта (угол ///Z) разряжается, отдавая потенциальную энергию инерционной массе 10, а во вторую половину заряжается с обратньм переходом кинетической энергии системы в потенциальную энергию пружины 12 аналогично циклу движения креста 6.
Таким образом, за один цикл работы механизма обеспечивается поочередный поворот мальтийских крестов 6 и 9 в одном направлении с равными законами движения на один и тот же угол деления, а зубья 15 и 16 фиксируют устойчивое положение в момент выхода пальцев 4 и 5 из пазов крестов 6 и 9. Энергия привода расходуется не для разгона инерционной массы, а лишь на преодоление сил трения в опорах, пружине 12 и на ее подзарядку.
Повьш1ение надежности мальтийского механизма достигается за счет уменьшения момента сил сопротивления в первую половину такта движения мальтийского креста и торможения ведомых масс во вторую половину такта, гашения излишней кинетической энергии вращающихся совместно с ведомыми валами масс, создающей дополнительную нагрузку на привод и звенья механизма. При этом обеспечивается более плавная работа механизма, снижаются динамические нагрузки на его элементы.
Формула изобретения
ма и снижения энергозатрат на его 2, Мальтийский механизм по п. f,|
привод, он снабжен вторым пальцем,отличающийся тем, что,
установленным на кривошипе с возмож-с целью расширения эксплуатационных
ностью поочередного взаимодействиявозможностей путем обеспечения малых
каждого из пальцев с соответствующимуглов поворота ведомых звеньев, упкрестом, а кресты развернуты другругий элемент выполнен в виде резиотносительно друга на угол /Z -нового диска, где Z - число пазов на кажДом кресте.
| Устройство прерывистого вращения | 1984 |
|
SU1178995A1 |
| Мальтийский механизм | 1978 |
|
SU688748A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
