ND
СА
о:.
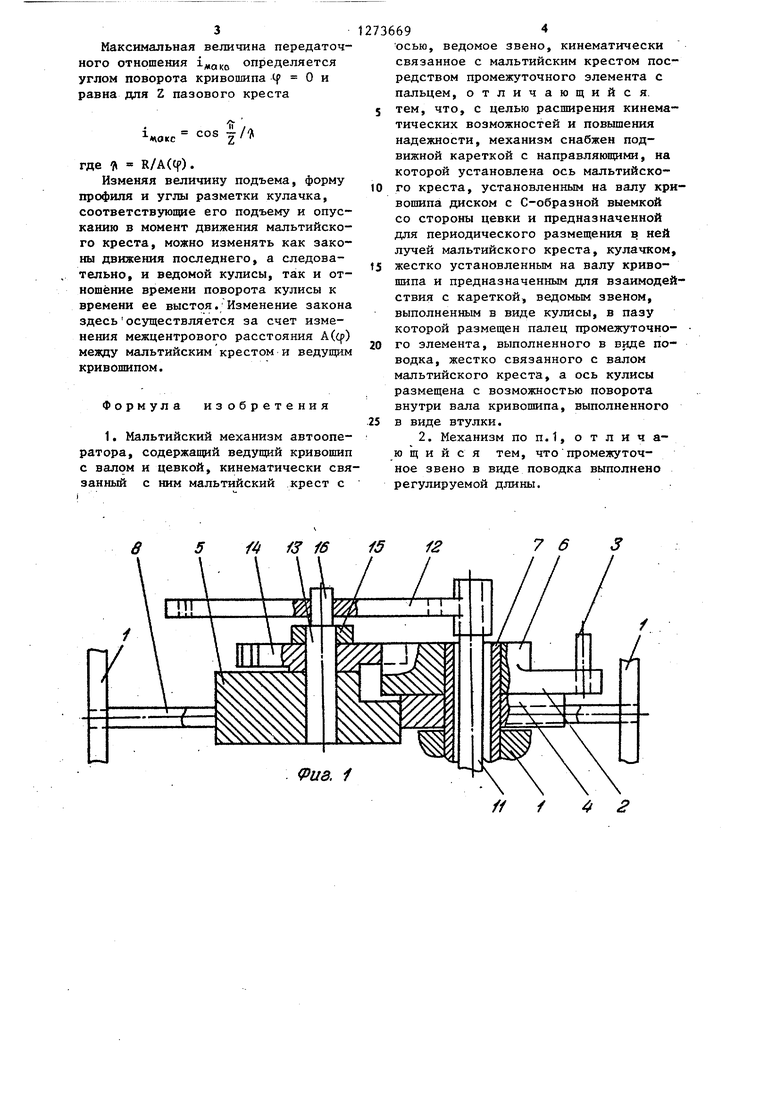
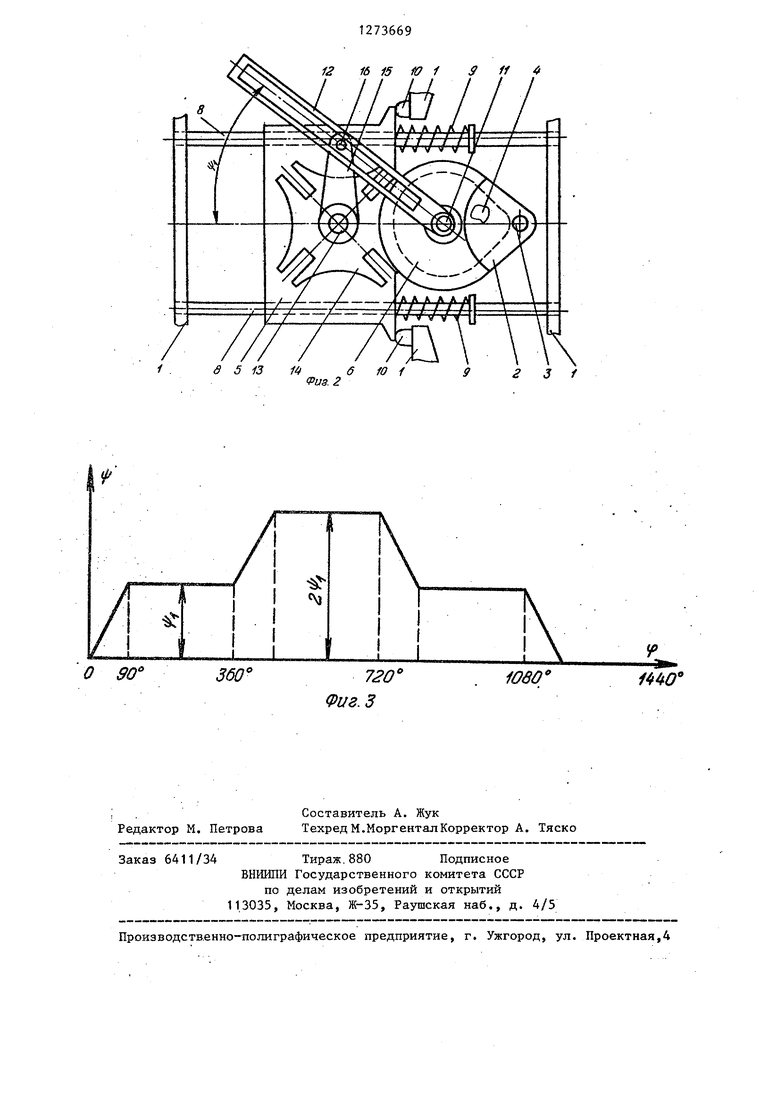
О5 СО 1 Изобретение относится к машиностроению и может быть использовано в различных устройствах для передачи деталей от одной технологической оп рации к другой. Цель изобретения - расширение ки нематических возможностей ведомого звена и увеличение долговечности ме ханизма путем достижения .возможноети изменения закона движения мальтийского креста. На фиг.1 изображена конструкция механизма автооператора, вид сбокуf на фиг.2 - то же, вид сверхуJ на фиг.З - циклограмма движения ведомо го звена. Мальтийский механизм автооператора содержит основание 1, ведущий кривошип 2 с цевкой 3, кулачок 4,вз имодействующий с подвижной кареткой 5, и диск 6, выполненный с С-образной выемкой. Кривошип 2, кулачок 4 и диск 6 жестко соединены с ведущим валом 7, выполненным в виде втулки. Подвижная каретка 5 установлена с возможностью возвратно-поступательного перемещения по направляющим 8 основания 1 при помощи кулачка 4 и .пружин 9. Передвижение каретки огра ничивают упоры 10. Ось 11 ведомого звена,,выполненного в виде кулисы 1 размещена с возможностью поворота внутри вала 7 кривошипа 2. На подвижной каретке 5 жестко установлена ось 13 поворота мальтийского кре та 14 с радиальными пазами и фиксируемыми диском 6 выемками. На оси 1 мальтийского креста 14 жестко установлен поводок 15 с пальцем 16,размещенным в пазу кулисы 12. Механизм работает следующим образом. При вращении ведущего кривошипа 2 цевка 3 входит в радиальный паз мальтийского креста 14 и поворачива ет его на угол, равный 2il/Z, где Z число пазов креста. Одновременно с поворотом крест перемещается поступательно вместе с кареткой 5 по направляющим 8 при вращении кулачка 4 взаимодействующего с кареткой.Форма профиля кулачка 4, соответствующая участку движения мальтийского креста, имеет переменный радиус кривизны. Палец 16, кинематически связанный с ведомой, кулисой 12,совершает вместе с мальтийским крес-. том 14 сложное движение: вращатель92ное относительно оси 13 вращения креста и поступательное вместе с кареткой 5. Ведомая кулиса при этом совершает возвратно-вращательное дви- жение с остановками. Для компенсации износа профиля кулачка 4 и обеспечения требуемой точности работы механизма автооператора предусмотрены регулируемые упоры 10, За четыре оборота ведущего кривошипа 2 совершается один цикл работы механизма с четьфехпазовым мальтийским крестом. За первый оборот кривошипа 2 ведомая кулиса 12 поворачивается на угол у, и останавливается, 2-4-й циклы аналогичны первому, причем за первые два цикла ведомая кулиса дважды с остановками поворачивается в одном направлении, а за третий и четвертый циклы аналогичным образом движется в обратном направлении. В одном направлении ведомая кулиса поворачивается на суммарный угол 2 О,, причем углы поворота кулисы за каждый цикл движения равны. , Для реализации неравных углов поворота ведомой кулисы необходимо использовать мальтийский механизм с неравными углами между пазами на кресте и с двумя или более цевками на . ведущем кривошипе. Угол размаха (f ведомого звена регулируется изменением места установки пальца 16 на кресте, например, с помощью поводка 15,жестко установленного на валу мальтийского креста. Изменение динамики ведомого звена достигается регулированием межцентрового расстояния между осью 13 мальтийского креста и валом 7 ведущего кривошипа. Мальтийский крест вместе с пальцем 16 совершает сложное движение с передаточным отношением, которое определяется по формуле i кГА(С) coscf - R d(f A4cf) - 2A(Cf) Rcoscf+R2 где d ((- изменение угла поворота мальтийского креста 14} d(f - изменение угла поворота ведущего кривошипа 2, A(Cf) - расстояние между центром кривошипа 2 и центром мальтийского креста 14, являющееся функцией угла (f поворота кривошипа, R - радиус ведущего кривошипа 2. Максимальная величина передаточного отношения 1д,ако определяется углом поворота кривошипа tf О и равна для Z пазового креста cos /где К R/A(Cf). Изменяя величину подъема, форму профиля и углы разметки кулачка, соответствующие его подъему и опусканию в момент движения мальтийского креста, можно изменять как законы движения последнего, а следовательно, и ведомой кулисы, так и отношение времени поворота кулисы к времени ее выстоя. Изменение закона здесьосуществляется за счет изменения межцентрового расстояния A(q) между мальтийским крестом и ведущим кривошипом. Формула изобретения 1. Мальтийский механизм автооператора, содержащий ведущий кривошип с валом и цевкой, кинематически свя занный с ним мальтийский крест с 694 осью, ведомое звено, кинематически связанное с мальтийским крестом посредством промежуточного элемента с пальцем, отличающийся. тем, что, с целью расширения кинематических возможностей и повышения надежности, механизм снабжен подвижной кареткой с направляющими, на которой установлена ось мальтийского креста, установленным на валу кривошипа диском с С-образной выемкой со стороны цевки и предназначенной для периодического размещения в ней лучей мальтийского креста, кулачком, жестко установленным на валу кривошипа и предназначенным для взаимодействия с кареткой, ведомым звеном, выполненным в виде кулисы, в пазу которой размещен палец промежуточного элемента, выполненного в виде поводка, жестко связанного с валом мальтийского креста, а ось кулисы размещена с возможностью поворота внутри вала кривошипа, выполненного в виде втулки. 2. Механизм поп.1, отличающийся тем, чтопромежуточное звено в виде поводка выполнено регулируемой длины.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Устройство для осуществления прерывистого вращения | 1977 |
|
SU679752A1 |
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФОРМЫ СТРОЧКИ ШВЕЙНОЙ МАШИНЫ "ЗИГЗАГ" | 1990 |
|
RU2023086C1 |
| РЕГУЛИРУЕМЫЙ МАЛЬТИЙСКИЙ МЕХАНИЗМ | 2006 |
|
RU2301929C1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
| Рычажно-кулачковый механизм для воспроизведения периодического вращения с постоянной и переменной скоростями | 1977 |
|
SU721626A1 |
| МЕХАНИЗМ ПОВОРОТА | 1968 |
|
SU209169A1 |
| Устройство для укладки изделий в пакет и поштучной выдачи изделий из пакета | 1986 |
|
SU1342844A1 |
| БИБЛИОТЕКА | 1973 |
|
SU368696A1 |
| Поворотно-делительный стол | 1990 |
|
SU1773685A1 |
Изобретение относится к мапшностроению, может быть использовано в различных устройствах для передачи деталей от одной технологической операхщи к другой и позволяет расширить кинематические возможности механизма и повысить его надежность. Ведупщй кривошип выполнен с цевкой, взаимодействующей с пазами мальтийского креста. Мальтийский крест установлен с возможностью поворота на оси, укрепленной на подвижной каретке, и фиксируется в период выстоя диском с С-образной впадиной, закрепленным вместе с кулачком, взаимодействующим с кареткой, на валу кривошипа. На оси мальтийского креста установлен регулируемый поводок с пальцем, размещенным в пазу ведомого звена - кулисы, ось которой установлена внутри вала кривошипа,выполненного в виде втулки. При вращении кривошипа его девка входит в паз i мальтийского креста и поворачивает его и поводок с пальцем, что приво(Л дит к повороту кулисы. Одновременно мальтийский крест с тележкой перемещается при помощи кулачка. 1 э.п. ф-лы, 3 ил.
12 16 15 Ю i 3 11
f
0 90
360 Фиг.З
720
ioeo
| Мальтийский механизм автооператора | 1980 |
|
SU905553A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
