/J
W
со
Oi
ел ел
Изобретение относится к механизации трудоемких процессов в животноводстве, в частности к кормораздатчикам.
Цель изобретения - упрощение конструкции и снижение металлоемкости.
На чертеже схематично изображен кормораздатчик, общий вид.
Кормораздатчик содержит желоб 1 из эластичного материала, один край которого присоединен к подвескам 2 кареток 3, а другой - к коротким гибким тягам 4, связанным с центральной гибкой тягой 5. Каретки установлены в направляющих 6. Подвески щарнирно соединены между собой при помощи жестких звеньев 7. Конец центральной гибкой тяги связан с рычагом 8 механизма привода, предназначенного для выгрузки корма из желоба путем перевода его в распрямленное положение, а также для придания ему (У-образной формы при загрузке кормом. Рычаг 8 подпружинен установленной на его оси пружиной 9 кручения и с ним взаимодействует защелка 10, подпружиненная пружиной 11. Управление рычагом и защелкой осуществляется основным 12 и дополнительным 13 упорами соответственно в начале холостого и в конце рабочего ходов желоба. Упоры закреплены на направляющих в зоне выгрузки корма.
Кормораздатчик работает следующим образом.
В исходном положении центральная гибкая тяга 5 и короткие гибкие тяги 4 находятся в крайнем правом положении, придавая желобу 1 У-образную форму. При этом рычаг 8 зафиксирован защелкой 10. В таком положении рычаг 8, короткие тяги 4 и желоб 1 находятся в процессе перемещения вправо по направляющим 6 на каретках 3 (рабочий ход), во время которого осуще
0
ствляется загрузка желоба кормом. Жесткие звенья 7 поддерживают постоянным расстояние между каретками 3 и подвесками 2. При достижении каретками края кормущки защелка 10 упирается в неподвижный упор 13 и освобождает рычаг 8, который под действием пружины 9 кручения опускается. При этом центральная гибкая тяга 5 перемещается влево, а короткие тяги 4 ослабляются, что сопровождается распрямлением полотна желоба (показано щтрихпункти- ром). В результате корм ссыпается в кор- мущку одновременно по всей длине желоба. При обратном (холостом) ходе желоба рычаг 8 под воздействием жесткого упора 12 приподнимается и фиксируется защелкой 10. При этом центральная гибкая тяга 5 перемещается вправо, создавая натяжение коротких тяг 4, в результате чего полотно желоба приобретает У-образную форму. Кормораздатчик готов для приема следующей порции корма.
Формула изобретения
Кормораздатчик, содержащий желоб из эластичного материала, один край которого присоединен к подвескам кареток, установленных в направляющих, а другой его край связан посредством гибкой тяги с механизмом привода, отличающийся тем, что, с целью упрощения конструкции и снижения металлоемкости, механизм привода выполнен из подпружиненного рычага, к которому прикреплена гибкая тяга, и взаимодействующей с ним подпружиненной защелки, управляемых от закрепленных на направляющих основного и дополнительного упоров соответ- ственно при холостом и рабочем ходах желоба.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик | 1989 |
|
SU1658940A1 |
| Кормораздатчик | 1989 |
|
SU1683599A1 |
| Кормораздатчик | 1983 |
|
SU1113061A1 |
| Кормораздатчик | 1980 |
|
SU1005739A1 |
| Кормораздатчик | 1987 |
|
SU1416092A1 |
| Мобильное средство для животноводческих помещений | 1989 |
|
SU1704720A1 |
| Кормораздатчик | 1983 |
|
SU1114385A1 |
| Дозатор сыпучих кормов | 1990 |
|
SU1704729A1 |
| Кормораздатчик | 1979 |
|
SU854342A1 |
| Кормораздатчик | 1984 |
|
SU1259984A1 |
Изобретение относится к механизации трудоемких процессов в животноводстве. Цель изобретения - упрощение конструкции и снижение металлоемкости. Кормораздатчик содержит желоб 1 из эластичного материала, который одним крае.м ноднешен к кареткам 3, а другим к коротким гибким тягам 4, связанным с централ11ной гибкой тягой 5. В исходном положении для загрузки кормом желоб имеет V -образную форму. При движении желоба к кормушкам нод- нружиненный рычаг 8 механизма привода тяг зафиксирован подпружиненной защелкой 10. В момент достижения желобом кормушек за- П1елка 10, взаимодействуя с упором 13, освобождает рычаг 8, который под действим своей пружины кручения опускается. В результате тяги 5 и 4 ос, 1аб. 1яются и полотно желоба распрямляется, обеспечивая осыпание корма в кормушки. При обратном ходе желоба рычаг 8 переводится в зафиксированное защелкой положение посредством упора 12, при этом желоб снова приобретает V -образую форму. I ил. (Л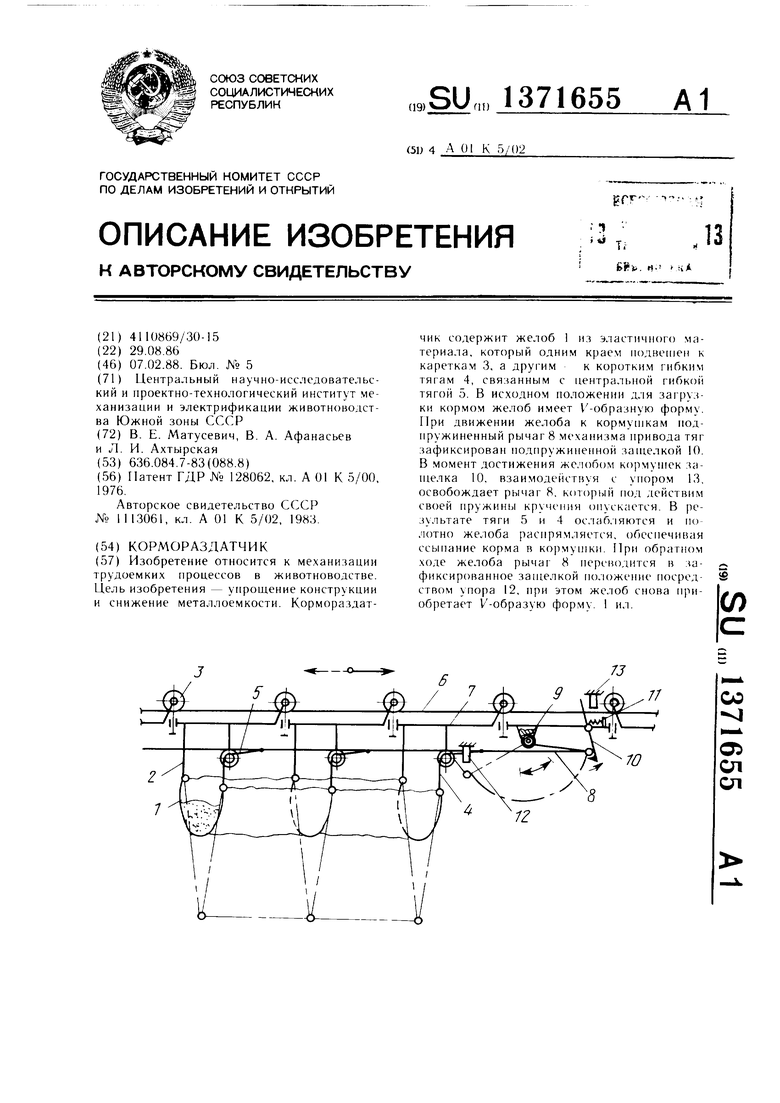
| Способ определения параметров полупроводниковых триодов в схеме с общим эмиттером в режиме переключения | 1959 |
|
SU128062A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кормораздатчик | 1983 |
|
SU1113061A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
