5zr
со
СП
о со
О)
Изобретение относится к текстильной промьшшенностИо
Цель изобретения - повьшение точности путем уменьшения вероятности сцепления контролируемых нитей.
На фиг.1 показана технологическая схема предлагаемого устройства; на фиг.2 - блок-схема устройства; на фиг.З - диаграмма работы устройства; на фиг.4 - блок-схема устройства с вариантом выполнения блока управления; на фиг.5 - диаграмма работы устройства с вариантом выполнения блока управления.
Устройство содержит электрически управляемый тормоз 1, установленный на сновальном валике 2, с которого основные нити 3 разматьгоаются под действием силы, сообщаемой тянульным валом 4. Над нитями 3 установлены фотоэлектрический датчик их положения, содержащий источник 5 излучения и приемник 6 с коллиматором 7 таким образом, чтобы пучок излучения от источника 5 бьш параллелен плоскости перемещения основы и перпендикулярен направлению их движения, Причем источник 5 излучения установлен от плоскости натянутых нитей 3 основы на рас стоянии,равном 2-5 максимальным амплитудам собственного колебания нитей на участке между опорами 8. Параллельно пучку излучения расположены ограничители 9, удерживающие провисшие нити 3 основы в таком положении, чтобы они не перекрывали путь излучения от источника 5 к приемнику 6, и могут быть выполнены, например, в виде двух параллельно натянутых проволок. Под нитями 3 перпендикулярно их движению но параллельно им установлена труба (сопло) 10 с продольным щелевидным отверстием (выходная часть сопла),
10
20
-зо0
3756962
точника питания (не показан). Выход блока 18 через ограничительное сопротивление R 1 соединен с выходом интегратора 19. Выход интегратора 19 подключен к входу усилителя 20, выход которого соединен с входом регулятора 21 тормозного усилия, прикладьгааемо- го тормозом 1 к сновальному валику 2.
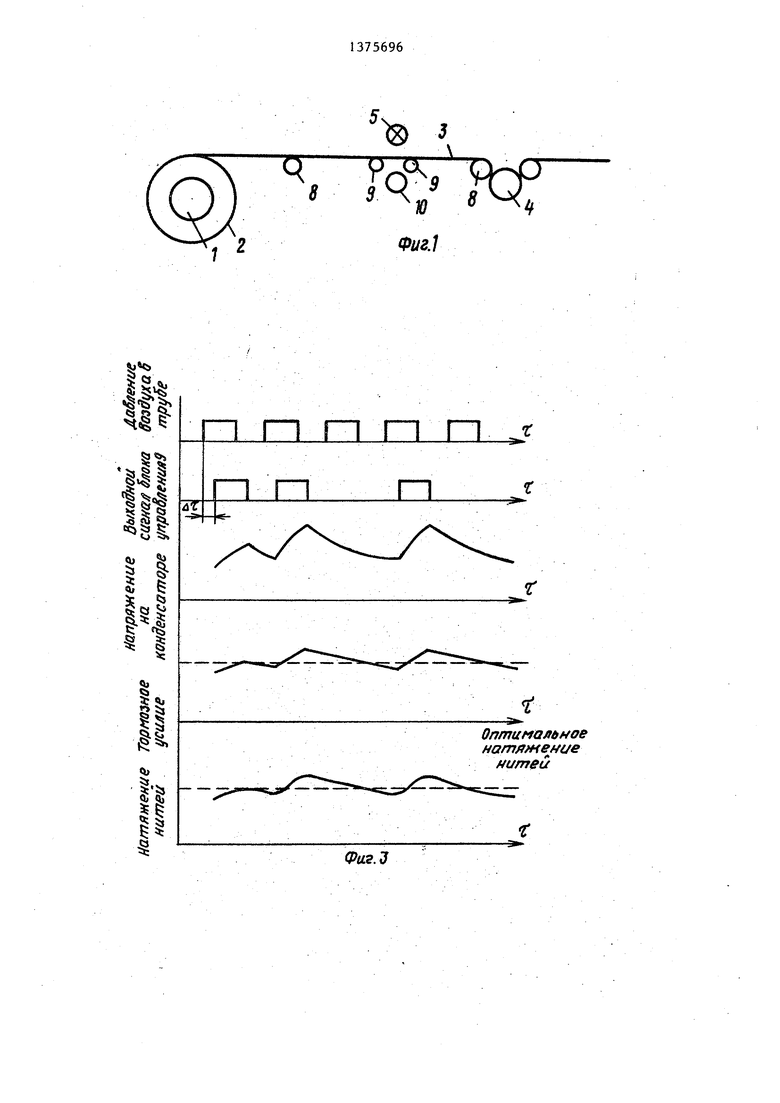
Для повышения помехоустойчивости устройства, например, к летающим в воздухе отдельным волокнам, пыли и исключения ложного срабатьшания, блок 18 выполнен в виде элемента И 22, ин- 5 вертора 23, однрвибратора 24, элементов И 25 и 26 и одновибратора 27, причем второй выход узла 14 синхронизации соединен с инвертором 23 и входом элемента И 22, выход компаратора 16 подключен к выходам элементов И 22 и 25, выход инвертора 23 соединен с входом элемента И 25, выход которого подключен к входу элемента И 26, другой вход которого соединен через од- новибратор 24 с выходом элемента И 22, выход элемента И 26 подключен к одновибратору 27, выход которого подключен к интегратору 19, выход интегратора 19 соединен с регулятором 21 тормозного усилия через усилитель 20.
Устройство работает следующим образом
В начальный момент разматьшания все нити не натянуты, но не перекрывают излучение, идущее от источника 5 к приемнику 6. В следующий момент от генератора 13 импульсов через узел 14 синхронизации поступают импульсы одновременно на пневмоклапан 1I и блок 18. От источника 12 сжатого воз-.
духа через пневмоклапан 11 воздух подается в трубу 10 с щелевидным отверстием. Провисшие нити потрком сжатого воздуха поднимаются и пересекают
25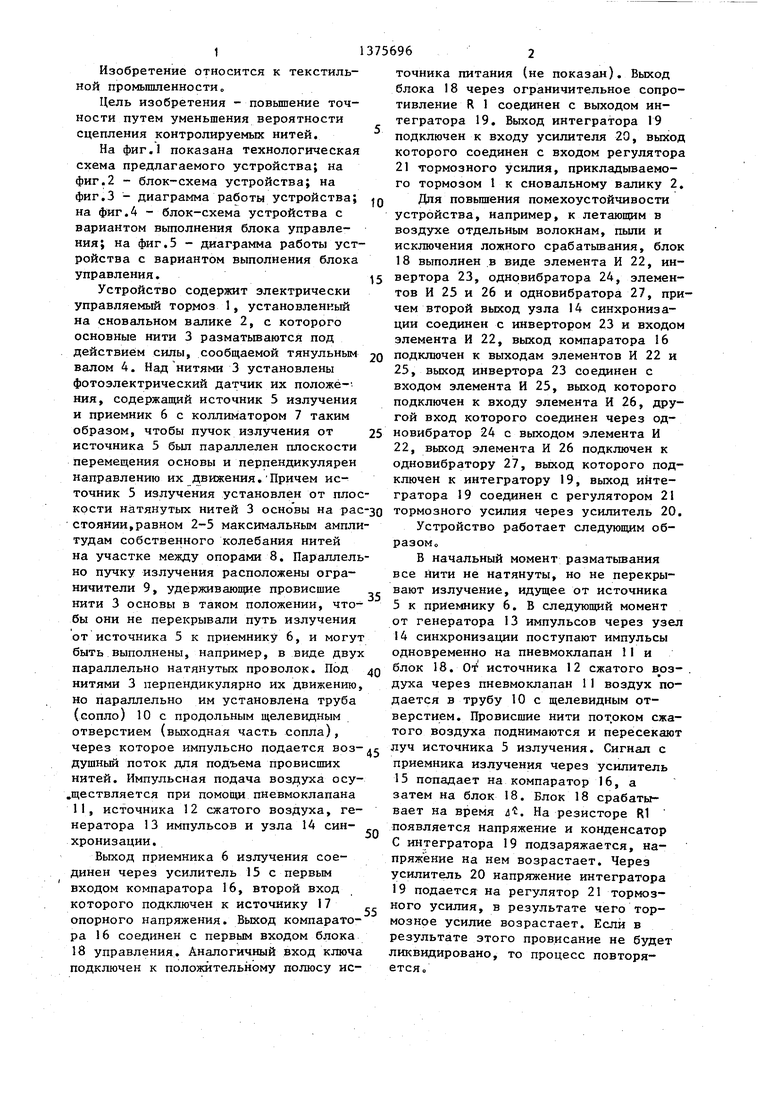
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом разматывания нитей основы со сновального валика | 1984 |
|
SU1194921A1 |
| СПОСОБ СОРТИРОВКИ ТОМАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2102854C1 |
| Широтно-импульсный регулятор для управления вентильным преобразователем | 1983 |
|
SU1181074A1 |
| Противоблокировочное устройство для тормозной системы транспортного средства | 1973 |
|
SU622392A3 |
| Устройство для регулирования подачи дополнительного воздуха в двигатель внутреннего сгорания | 1990 |
|
SU1768787A2 |
| СПОСОБ СОРТИРОВКИ ТОМАТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2084109C1 |
| Устройство для управления тяговым электроприводом постоянного тока транспортного средства | 1984 |
|
SU1270039A1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1992 |
|
RU2050596C1 |
| Автоматический регулятор возбуждения для синхронной машины | 1981 |
|
SU1020954A1 |
Изобретение относится к текстильной промышленности. Цель изобретения - повышение точности путем уменьшения вероятности сцепления контролируемых нитей. Под нитями основы перпендикулярно их движению, но параллельно им установлена труба с продольным щелевидным отверстием. Подача воздуха к трубе осуществляется при помощи пневмоклапана 11, связанного с источником 12 сжатого воздуха и управляющего генератором 13, узлом 14 синхронизации и блоком 18 управления. 1 з.По ф-лы, 5 ил. с (Л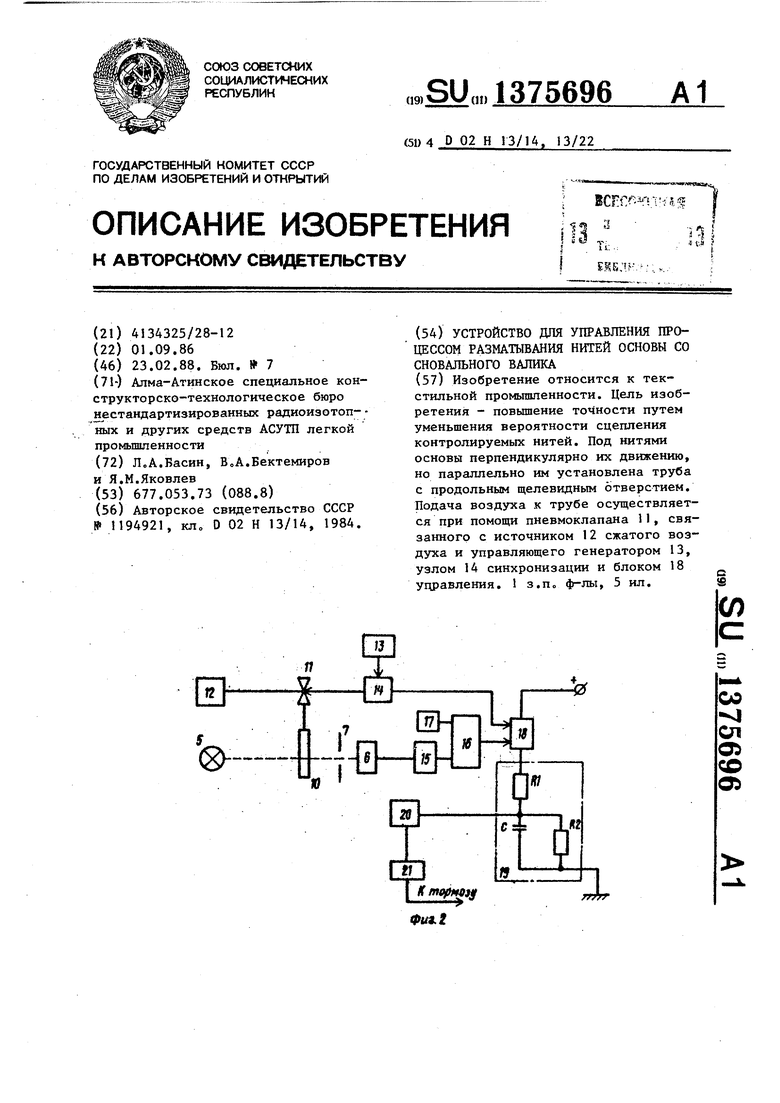
через которое импульсно подается луч источника 5 излучения. Сигнал с
Душный поток для подъема провисших нитей. Импульсная подача воздуха осу- .ществляется при помощи пНевмоклапана 11, источника 12 сжатого воздуха, генератора 13 импульсов и узла 14 синхронизации.
Выход приемника 6 излучения соединен через усилитель 15 с первым входом компаратора 16, второй вход которого подключен к источнику 17 опорного напряжения. Выход компаратора 16 соединен с первым входом блока 18 управления. Аналогичный вход ключа подключен к положительному полюсу ис0
5
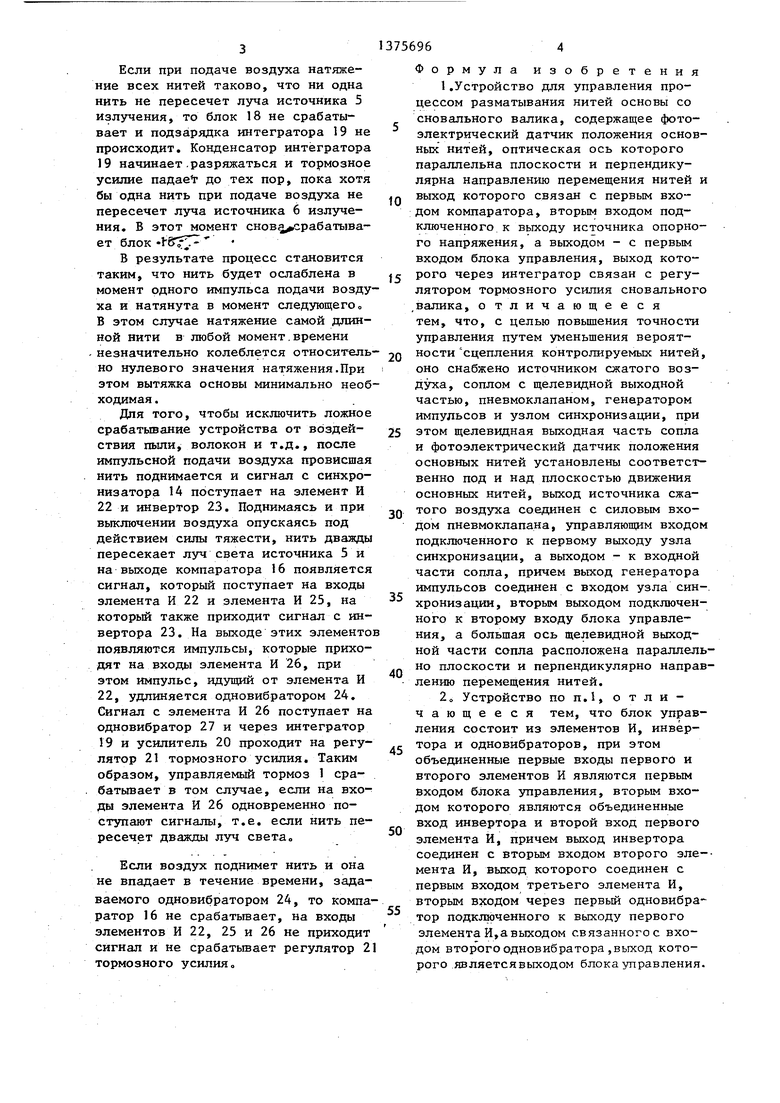
приемника излучения через усилитель 15 попадает на компаратор 16, а затем на блок 18. Блок 18 срабатывает на время 1. На резисторе R1 появляется напряжение и конденсатор С интегратора 19 подзаряжается, напряжение на нем возрастает. Через усилитель 20 напряжение интегратора 19 подается на регулятор 21 тормозного усилия, в результате чего тормозное усилие возрастает. Если в результате этого провисание не будет ликвидировано, то процесс повторяется.
Если при подаче воздуха иатяже- ние всех нитей таково, что ни одна нить не пересечет луча источника 5 Излучения, то блок 18 не срабатывает и подзарядка интегратора 19 не происходит. Коьвденсатор интегратора 19 начинает.разряжаться и тормозное усилие падае г до тех пор, пока хотя бы одна нить при подаче воздзпса не пересечет луча источника 6 излучения, В этот момент снов срабатыва- ет блок
В результате процесс становится таким, что нить будет ослаблена в момент одного импульса подачи воздуха и натянута в момент следующего В этом случае натяжение самой длинной нити в любой момент.времени незначительно колеблется относительно нулевого значения натяжения.При i этом вытяжка основы минимально необходимая .
Для того, чтобы исключить ложное срабатывание устройства от воздействия пыли, волокон и т.д., после импульсной подачи воздуха провисшая нить поднимается и сигнал с синхронизатора 14 поступает на элемент И 22 и инвертор 23. Поднимаясь и при выключении воздуха опускаясь под действием силы тяжести, нить дважды пересекает луч света источника 5 и на выходе компаратора 16 появляется сигнал, который поступает на входы элемента И 22 и элемента И 25, на который также приходит сигнал с инвертора 23. На выходе этих элементов появляются импульсы, которые приходят на входы элемента И 26, при этом импульс, идущий от элемента И 22, удлиняется одновибратором 24. Сигнал с элемента И 26 поступает на одновибратор 27 и через интегратор 19 и усилитель 20 проходит на регулятор 21 тормозного усилия. Таким образом, управляемый тормоз 1 срабатывает в том случае, если на входы элемента И 26 одновременно поступают сигналы, т.е. если нить пересечет дважды луч света
Если воздух поднимет нить и она не впадает в течение времени, задааемого одновибратором 24, то компаатор 16 не срабатьгеает, на входы лементов И 22, 23 и 26 не приходит игнал и не срабатьюает регулятор 21 ормозного усилия
0
5
0
5
0
5
0
5
0
5
Формула изобретения
2о Устройство по п.1, о т л и - чающееся тем, что блок управления состоит из элементов И, инвертора и одновибраторов, при этом объединенные первые входы первого и второго элементов И являются первым Входом блока управления, вторым входом которого являются объединенные вход инвертора и второй вход первого элемента И, причем выход инвертора соединен с вторым входом второго эле-- мента И, выход которого соединен с первым входом третьего элемента И, вторым входом через первый одновибратор подключенного к выходу первого элемента И,а выходом связанного с входом второго одновибратора , выход которого являетсявыходом блока управления.
Ч
П П П П t
(U
ъ
э
Р|
I
Фия.Ъ
Ф
Ю
Фиг. г
Оптимальное нат/1н е ие митей
ПП П П
П
П
1
i
8
ll
OnmuHantwe
П п.
n
n
Л.
П
С
| Способ управления процессом разматывания нитей основы со сновального валика | 1984 |
|
SU1194921A1 |
