Фа,9
Изобретение относится к текстильной промьшленности.
Цель изобретения - повьшение точности путем индивидуальной стабилизации натяжения каждой нити.
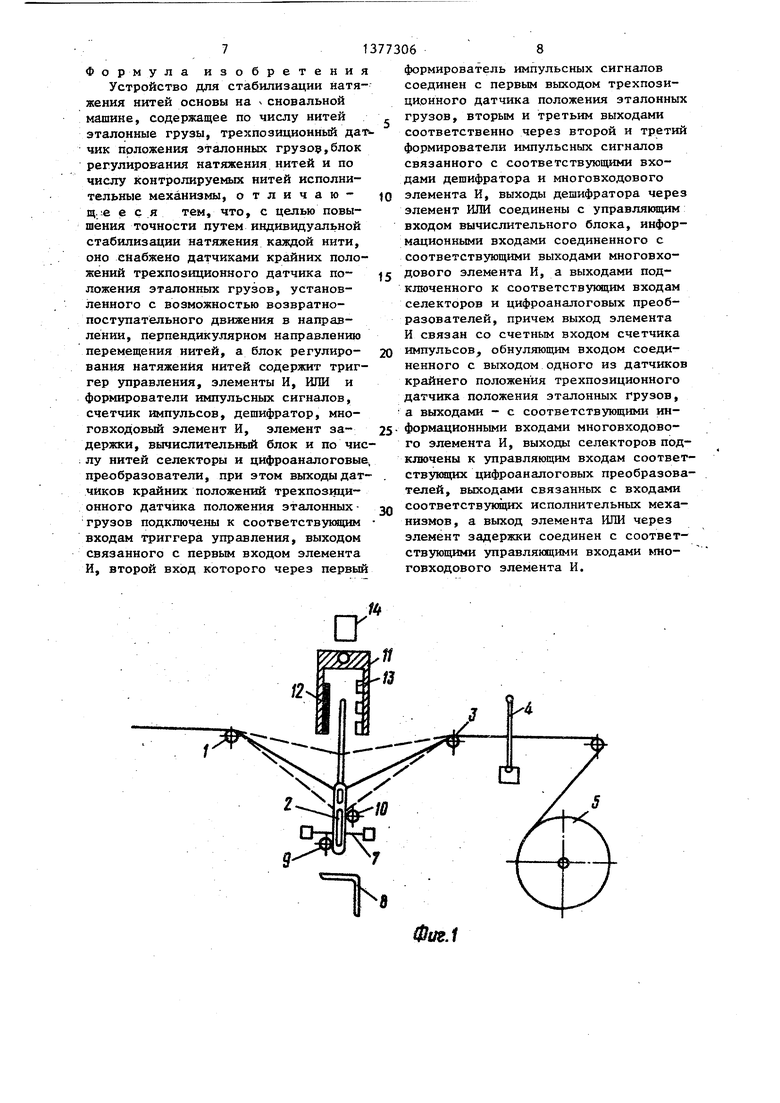
На фиг. 1 показано устройство,вид сбоку, на фиг. 2 - сновальная машина с системой контроля, натяжения нитейJ на фиг. 3 структурная схема устройства.
Устройство содержит нитенаправи- тель 1, эталонные грузы 2 и нитена- правитель 3, которые, взаимодействуя с нитями основы, образуют петлю прогиба. Нити основы проходят через разделительную гребенку А и наматываются на . сновальный вал 5, приводимый во вращение электродвигателем 6, эталонные грузы 2, с цельй устранения перемещения в горизонтальном направлении, разделяются разделительной гребенкой 7. Ограничитель 8 перемещения эталонных грузов при увеличении петли прогиба нитей основы препятствует перемещению эталонных грузов 2 ниже установленного допуска. Направляющие прутки 9 и 10 при дви- keнии нитей основы в глазках эталонных грузов 2 служат для удержания их в вертикальном положении. Устройство содержит сканирующий узел 11, включающий трехпозиционный датчик положения грузов 2, состоящий из инфракрасного излучателя 12 и трех фотоприемников 13, датчики 14 крайних положений трехпозиционного датчика, вал 15, служащий для перемещения сканирующего узла 11, формирователи 1618импульсных сигналов, служащие для формирования прямоугольных импульсов требуемой длительности при поступлении на их вход модулированных сигналов со сканирующего узла 11, триггер
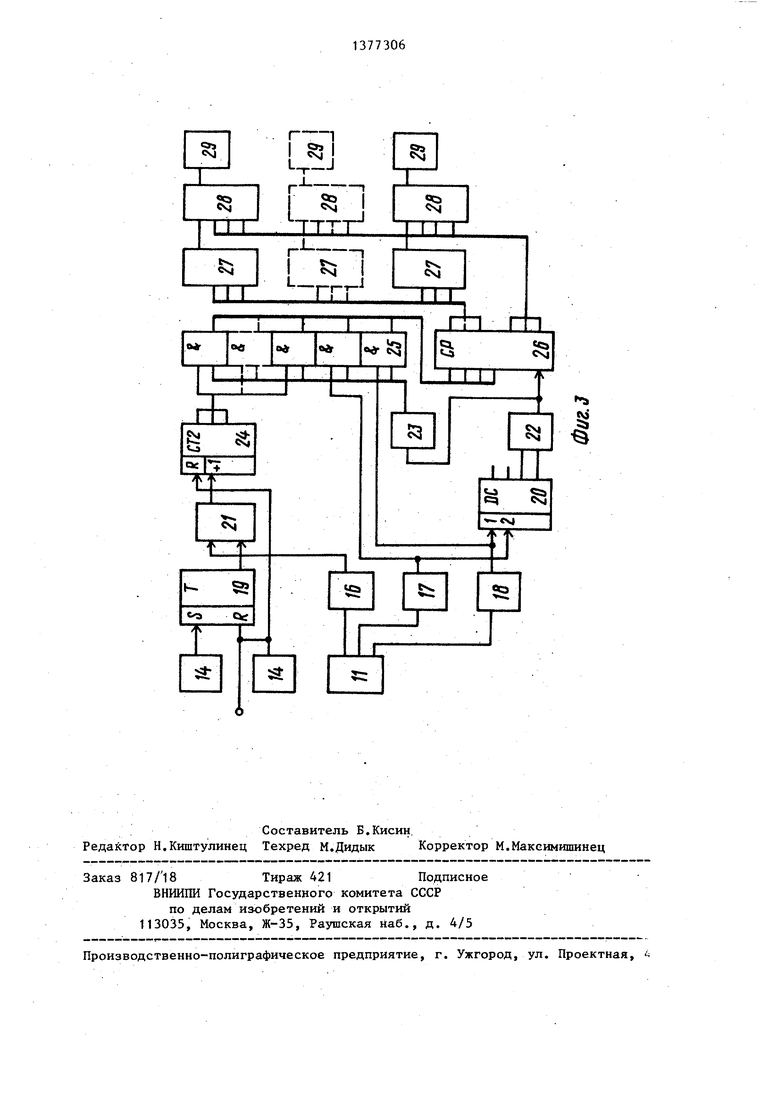
19управления, управляющий началом- счета импульсов, поступающих со сканирующего узла 11, дешифратор 20,формирующий на своем выходе потенциалы, соответствующие определенным кодовым комбинациям на его входе, элемент И 21, разрешающий прохождение импульсов с формирователя 16 импульсных сигналов при наличии на своем втором входе 1, элемент ИЛИ 22, пропускающий сигналы с дешифратора 20, эле- .мент 23 задержки, служащий для задержки сигнала на время переходных процессов, двоичный счетчик 24 им-, пульсов, обеспечивающий последовательный счет всех эталонных грузов 2 и формирующий на своем выходе кодовую комбинацию, многовходовой элемент И 5 25, предназначенньй для передачи ко- довой комбинации в вычислительный блок 26, группу селекторов 27, служащую для принятия только определенной кодовой комбинации и выдачи уп- 10 равляющего потенциала на своем выхоп де, группу цифроаналоговых преобразователей 28, обеспечивакйцую преобразование цифрового кода в аналоговое напряжение, которое прикладывается к 15 управляемым натяжным приборам (исполнительным механизмам) 29.
Отдельные элементы устройства взаимосвязаны следующим образом.
Первьш выход сканирующего узла 11 20 связан с формирователем 16 импульсных сигналов, а второй и третий выходы связаны соответственно с входами фор- мироват.елей 17 и 18 импульсных сигналов. Выход первого датчика 14 положе- 25 ния соединен с S-входом триггера 19 управления, R-вход которого соединен с выходом второго датчика 14 положения и с R-входом (обнуляющим) счетчика 24 импульсов, счетньй вход которо- 30 го соединен с выходом элемента И 21. Выход триггера 19 управления соединен с одним входом элемента И 21, другой вход которого соединен с выходом формирователя 16 импульсных сигналов.Вы- эс ходы формирователей 17 и 18 импульсных сигналов связаны соответственно с группой входов многовходового элемента и 25 и с входами дешифратора 20, выходы которого соединены с входами 4Q элемента ИЛИ 22. Выход элемента ИЛИ 22
соединен через элемент 23 задержки с управляющими входами многовходово- го элемента И 25, одна группа информационных входов которого соединена
д5 с выходами счетчика 24 импульсов. Выходы многовходового элемента И 25 соединены с соответствующими входами вычислительного блока 26, управляющий вход.которого соединен с выCQ ходом элемента ИЛИ 22. Соответствующие выходы вычислительного блока 26 - Соединены с входами селекторов 27, выходы которых соединены с одними входами цифроаналоговых преобразо вателей 2В, другие входы которых соединены с вьпсодом вычислительного блока 26, а выходы цифроаналоговых преобразователей 28 связаны с натяжных приборов 29.
Устройство работает следующим образом.
Первый режим работы устройства - натяжение нитей в пределах допустимых отклонений.
Перед началом работы сновальной машины подается сигнал начальной установки, устанавливающий триггер 10 управления и счетчик 24 импульсов в исходное состояние. При включении электродвигателя 6 пряжа сматывается со шпулярника (не показан) и через нитенаправитель 1, через ушко эталонного груза 2, через нитенаправитель 3 и через разделительную гребенку 4 поступает на сновальный вал 5. Разделительная гребенка 7 обеспечивает требуемое положение эталонных грузов 2, а направляющие прутки 9, .10 во время движение пряжи поддерживают эталонные грузы в вертикальном положении. Эталонные грузы 2 имеют достаточный вес, способный удерживать их в положении, указанном на фиг. 1. Ограничитель 8 перемещения эталонных грузов предупреждает перемещение конца эталонного груза 2 ниже последнего фотоприемника 13. Сканирующий узел 11 включает инфракрас- ньй излучатель 12 и три фотоприемника 13. При перемещении сканирующего узла 1.1 вдоль эталонных грузов 2 (привод сканирующего узла не показан он периодически попадает в зону действия датчиков 14 положения, которые могут быть выполнены в виде индуктивных детекторов сближения. При этом один из них вьщает импульсный сигнал на S-вход, а второй - на R-вход триггера 19 управления. С приходом импульсного сигнала с датчика 14 положения на S-вход триггера 19 управле- ния он опрокидывается и на его выходе появляется разрещающий потенциал, который поступает на вход элемента И 21. Перемещение сканирующего узла 11 вдоль эталонных грузов 2 вызывает модуляцию инфракрасного излучения. Если наияжение нити находится в пределах допустимых значений (см.фиг. 1) то модулированный сигнал возникает на первом и втором фотоприемниках (счет фотоприемников идет снизу). Модулированный сигнал с первого фотоприемника поступает на первый выход сканирующего узла 11 и далее через формирователь 16 импульсных сигналов на один вход элемента И 21.На
0
5
0
5
0
5
0
5
0
5
другом входе этого элемента имеется разрешающий потенциал с триггера 19 управления, поэтому импульсы проходят через элемент И 21 и поступают на счетньм вход счетчика 24 импульсов. Он обеспечивает счет всех эталонных грузов 2 и на его выходе с приходом очередного импульса появляется соответствующая кодовая комбинация, указывающая местоположение эталонного груза 2. Указанная очередная кодовая комбинация с дв оичного счетчика 24 импульсов прикладьюается к информационным входам многовходового элемента И 25. Если эталонные грузы 2 находятся в зоне допустимых отклонений натяжений, то на втором выходе сканирующего узла 11 появляются модулированные сигналы, а на третьем выходе - постоянный потенциал. В этом случае при прохождении сканирующего узла вдоль эталонных грузов 2 на входе формирователя 17 импульсных сигналов в момент пересечения эталонного груза появляется О, а на входе формирователя 18 импульсных сигналов - 1. Указанная кодовая комбинация поступает на входы элемента И 25 и дешифратора 20. При перемещении сканирующего узла 11 в свое крайнее положение срабатывает второй датчик 14 положения и выдает импульс, который осуществляет сброс счетчика 24 импульсов и триггера 19 управления. Триггер 19 выдает на своем выходе запрещающий потенциал и прохождение импульсов при.обратном ходе сканирующего узла 11 в счетчик 24 импульсов прекращается.
Второй режим работы - натяжение Bbmie предельно допустимых отклонений.
В этом случае если какая-либо из нитей окажется перетянутой, то ,эталонный груз 2 поднимается вьш1е третьего фотоприемника. Такое положение эталонного груза вызывает при перемещении сканирующего узла 11 модулирование инфракрасного излучения. Если натяжение нити больше предельно допустимого, то модулированный сигнал возникает на всех трех фотоприемниках. Модулированньй сигнал с первого фотоприемника, так же как и в первом режиме работы, поступает че- рез формирователь 16 импульсных сигналов и через элемент И 21 на счетный вход счетчика 24 импульсов. Этот счетчик обеспечивает счет импульсов
и вьщачу очередной кодовой комбинации на входы многовходового элемента И 25. Модулированный сигнал с второго и третьего фотоприемников сканирующего узла 11 поступает через формирователи 17 и 18 на соответствующие входы многовходового элемента И 25 и на входы дешифратора 20. Последний в соответствии с указанной кодовой комбинацией вырабатьтает потенциал, который через элемент ИЛИ
22и через элемент 23 задержки пос- тупает к управляющим входам элемента И 25. К моменту подачи указанного потенциала на входы элемента И
23сохраняются кодовые комбинации о местоположении эталонного груза 2 в ряду и его местоположение относительно зоны допустимых отклонений. Указанная кодовая комбинация по сигналу прерывания, поступающего с выхода элемента ИЛИ 22 на вход вычислительного блока 26, записывается в вычислительный блок 26. Таким образом, при полном проходе сканирующего узла в памяти вычислительного блока хранится место эталонных грузов, натяжение которых не соответствует предельно допустимым значениям, и его местоположение относительно зоны допустимых отклонений. При достижении сканирующим узлом 11 второго датчика 14 положения с его выхода поступает импульс, который очищает счетчик 24 импульсов, опрокидывает триггер 19 управления, и потенциал с его выхода прикладывается к соответствующему входу элемента И 21. В эТом случае при обратном ходе сканирующего узла 11 счет эталонных грузов 2
не производится, а вычислительный блок 26 в соответствии с заданной программой последовательно выдает на свою первую и вторую группы выходов сначала код номера управляемого на- тяженого прибора, а затем код, пропорциональный величине натяжения.При поступлении на общую шину кода номера натяжного прибора 29 срабатьшает один из селекторов 27, который вырабатывает на своем выходе потенциал. Указанный потенциал прикладывается к входу соответствующего цифроаналого- вого преобразователя 28, подготавливая его к принятию кода, пропорционального величине натяжения. Проведя подготовительную работу, вычислительный блок 26 на выходах формиру13773066
ет кодовую комбинацию, пропорциональную величине натяжения. Указанная кодовая комбинация поступает на общую шину и прикладывается к входам цифро- аналоговых преобразователей 28. Там, где имеется разрешающий потенциал, с селектора 27 производится запись кодовой комбинации, пропорциональной
и 10 величине натяжения в регистр цифро- аналог ового преобразователя 28, который вьщает на своем выходе величину соответствующего напряжения. Это напряжение прикладьшается к натяжно- 15 му прибору 29 (например, электромагнитный натяжитель), обеспечивая тем самым изменение величины натяжения. Таким образом, при обратном ходе сканирующего узла 11 на соответствую- 20 щих натяжных приборах 29 натяжение изменяется на некоторую элементарную величину. При прямом ходе сканирую25
30
35
40
45
50
55
щего узла 11 цикл повторяется, и если натяжение на соответствующих натяжных приборах не соответствует предельно допустимым значениям, то его величина изменяется еще на некоторую элементарную величину. Этот процесс повторяется до тех пор, пока конец эталонного груза 2 не окажется в зоне допустимых значений натяжения .
Третий режим работы - натяжение ниже предельно допустимых отклонений.
В этом случае если какая-либо из нитей окажется натянутой слабо, то эталонньй груз 2 опустится ниже второго фотоприемника. Такое положение , эталонного груза вызывает при перемещении сканирующего узла 11 модулирование инфракрасного излучения только на первом фотоприемнике. При этом устройство функционирует также, как и во втором режиме работы. Отличие заключается в том, что на элементе И 25 появляется кодовая комбинация, сигнализирующая о снижении натяжения нити основы. В этом случае вычислительный блок 26 реализует другой алгоритм работы, т.е. на своих входах он вьщает кодовую комбинацию, пропорциональную увеличению натяжения нити на некоторую элементарную величину. Этот процесс повторяется до тех пор, пока величина натяжения нити не окажется в зоне допустимых отклонений.
5
0
5
0
5
0
5
щего узла 11 цикл повторяется, и если натяжение на соответствующих натяжных приборах не соответствует предельно допустимым значениям, то его величина изменяется еще на некоторую элементарную величину. Этот процесс повторяется до тех пор, пока конец эталонного груза 2 не окажется в зоне допустимых значений натяжения .
Третий режим работы - натяжение ниже предельно допустимых отклонений.
В этом случае если какая-либо из нитей окажется натянутой слабо, то эталонньй груз 2 опустится ниже второго фотоприемника. Такое положение , эталонного груза вызывает при перемещении сканирующего узла 11 модулирование инфракрасного излучения только на первом фотоприемнике. При этом устройство функционирует также, как и во втором режиме работы. Отличие заключается в том, что на элементе И 25 появляется кодовая комбинация, сигнализирующая о снижении натяжения нити основы. В этом случае вычислительный блок 26 реализует другой алгоритм работы, т.е. на своих входах он вьщает кодовую комбинацию, пропорциональную увеличению натяжения нити на некоторую элементарную величину. Этот процесс повторяется до тех пор, пока величина натяжения нити не окажется в зоне допустимых отклонений.
Ф о р м ула изобретения Устройство для стабилизации натяжения нитей основы на сновальной машине, содержащее по числу нитей эталонные грузы, трехпозиционный дат чик положения эталонных грузе,блок регулиронания натяжения нитей и по числу контролируемых нитей исполнительные механизмы, отличаю- щ.е е с я тем, что, с целью повышения точности путем индивидуальной стабилизации натяжения каждой нити, оно снабжено датчиками крайних положений трехпозиционного датчика положения эталонных грузов, установленного с возможностью возвратно- поступательного движения в направлении, перпендикулярном направлению перемещения нитей, а блок регулирования натяжения нитей содержит триггер управления, элементы И, ИЛИ и формирователи импульсных сигналов, счетчик импульсов, дешифратор, мно- говходовый элемент И, элемент задержки , вычислительный блок и по числу нитей селекторы и цифроаналоговые преобразователи, при этом выходы датчиков крайних положений трехпозиционного датчика положения эталонных - грузов подключены к соответствукнцим входам триггера управления, выходом связанного с первым входом элемента И, второй вход которого через первый
-
10
3773068
формирователь импульсных сигналов соединен с первым выходом трехпозиционного датчика положения эталонных грузов, вторым и третьим выходами соответственно через второй и третий формирователи импульсных сигналов связанного с соответствующими входами дешифратора и многовходового элемента И, выходы дешифратора через элемент ИЛИ соединены с управляющим входом вычислительного блока, информационными входами соединенного с соответствующими выходами многовходового элемента И, а выходами подключенного к соответствукнцим входам селекторов и цифроаналоговых преобразователей, причем выход элемента И связан со счетным входом счетчика импульсов, обнуляющим входом соединенного с выходом одного из датчиков крайнего положения трехпозиционного датчика положения эталонных грузов, а выходами - с соответствующими информационными входами многовходового элемента И, выходы селекторов подключены к управляющим входам соответ- ствуницих цифроаналоговых преобразователей, выходами связанных с входами соответствуюнщх исполнительных механизмов, а выход элемента ИЛИ через элемент задержки соединен с соответствующими управляющими входами многовходового элемента И.
15
20
25
30

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики тормозной системы сновальной машины | 1986 |
|
SU1392159A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДЛИННОМЕРНЫХ МАТЕРИАЛОВ В РУЛОН | 2006 |
|
RU2329939C2 |
| Измеритель плотности ткани по утку | 1982 |
|
SU1100340A1 |
| Устройство для обучения операторов | 1990 |
|
SU1709375A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИДЕНТИЧНЫХ ПАКОВОК НА ПАРТИОННОЙ СНОВАЛЬНОЙ МАШИНЕ | 2012 |
|
RU2531886C2 |
| Устройство для контроля поверхностной плотности ткани | 1986 |
|
SU1416569A1 |
| Устройство для управления сновальной машиной | 1987 |
|
SU1498841A1 |
| Устройство для контроля и учета подвижных объектов | 1983 |
|
SU1149301A1 |
| Устройство отмеривания заданной длины намотки длинномерных материалов | 1985 |
|
SU1270543A1 |
| Устройство для устранения качаний при оптико-механической развертке | 1973 |
|
SU467496A1 |
Изобретение относится к текстильной промьшшенности. Цель изобретения - повышение точности путем индивидуальной стабилизации натяжения каждой нити. Натяжение каждой нити контролируется по положению зталон- ного груза 2 с помощью сканируницего узла 11, содержащего трехпозиционный датчик положения грузов 2, состоящий КЗ излучателя и трех фотоприемников. В процессе перемещения узла 11 информация о выходе фактического натяжения каждой нити за допустимые пределы поступает в вычислительный блок, который посредством последовательно включенных селекторов и цифроанало- говых преобразователей вьщает сигна н лы на исполнительные механизмы, восстанавливающие требуемое натяжение каждой нити. 3 ил. (Л 15 00 Ч 00 о Oi
| 0 |
|
SU213705A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
