фиг.1
Изобретение относится к измерительной технике и может быть использовано для бесконтактного измерения скорости медленно движущихся машин, работающих в условиях сильных вибраций.
Цель изобретения - повышение точности.
На фиг. 1 изображена структурная электрическая схема предлагаемого устройства; на фиг. 2 - примеры выполнения преобразователя частоты в напряжение и синхронизатора.
Устройство содержит передатчик I, приемник 2, генератор 3, синхронный детектор 4, полосовой усилитель 5, компаратор 6, преобразователь 7 частоты в напряжение, синхронизатор 8, фильтр 9 нижних частот (ФНЧ), преобразователь 0 уровня сигнала и регистратор П, при этом генератор содержит кварцевый генератор 12 и делители J3 и 14 частоты.
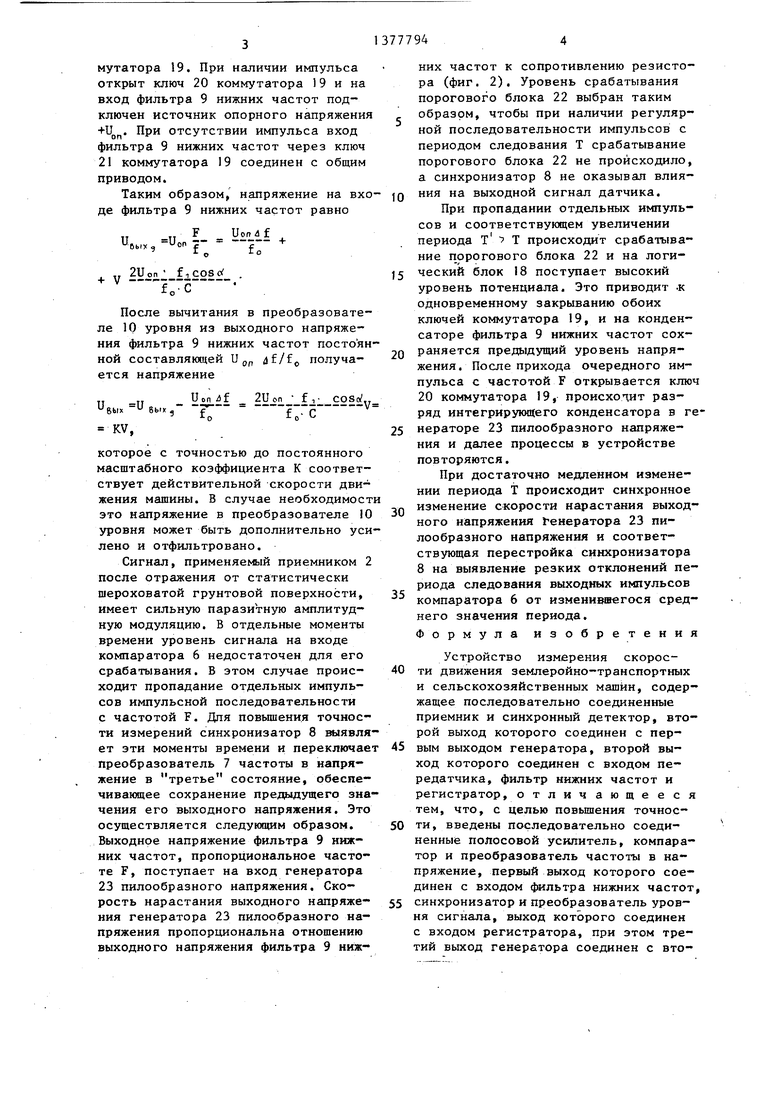
Преобразователь частоть в напряжение (фиг. 2) содержит формирователь 5 импульсов, включающий триггеры 16 и 17,. логический блок 18 и коммутатор 19, включающий ключи 20 и 25. Синхронизатор (фиг. 2) содержит пороговый блок 22 и генератор 23 пилообразного напряжения.
Устройство работает следующим образом.
Передатчик 1 , расположеннь1й на машине, излучает зондирунвдий сигнал с частотой f , направленный под углом d К поверхности грунта. Этот сигнал после отражения от поверхности грунта принимается приемником 2, который также расположен на машине. В соответствии с законом Доплера частота принимаемого сигнала равна
IV „ ,(1- со8.),
где V - скорость движения машины; С - скорость распространения зондирующего, излучения (например, ультразвука). Этот сигнал поступает на вход синхронного детектора 4.
После преобразования частоты, фильтрации и усиления в полосовом усилителе 5 и дискретизации его по нулевому уровню в компараторе 6 фор мируется последовательность прямоугольных импульсов, частота следования которых равна
10
15
20
25
2V F f,(H- Icos)-f, +
2V2V
+ --f,coso л + --f coso/,
L.Vj
где f - частота сигнала, поступающего с генератора 3 на вход синхронного детекто- ра 4.
При неподвижной машине частота следования зтих импульсов постоянна и равна FO uf . При движении машины вперед или назад частота следования импульсов F соответственно увеличивается или уменьшается за счет слагаемого 2V/Cf,cosd. Для нормальной работы устройства разность частот ,-fj выбирается таким образом, чтобы при любых скоростях движения и вибрациях машины обеспечивалось выполнение условия df 7 2V/Cf cosol. Это дает возможность исключить из приемного тракта квадратурный канал при сохранении возможности определения направления движения машины.
Импульсы с частотой F, т.е. с периодом следования Т, поступают на счетный вход триггера 17 формирователя 15 импульсов. По переднему фронту этих сигналов триггер 17 срабатывает и устанавливает на D-входе триггера 16 высокий уровень потенциала. После прихода ближайшего переднего фронта импульса частоты fо на счетный вход триггера 16 последний переходит в единичное состояние и по входу R возвращает триггер 17 в исходное состояние, вновь устанавливая на D-входе триггера I6 нулевой уровень потенциала. Следующим передним фронтом импульса частоты f триггер 16 возвращается в нулевое состояние, и формирователь 15 импульсов 45 переходит в исходное состояние до прихода следующего переднего фронта импульсной последовательности с частотой F.
Таким образом, с приходом перед- 50 него фронта импульсной последователь- ности с частотой F формируется импульс фиксированной длительности, равной периоду следования импульсов частоты fg. Импульсы фиксированной 55 длительности непосредственно и через логический блок 18 (работающий в рассматриваемом случае в режиме инвертора) поступают на входы ком30
35
40
мутатора 19. При наличии импульса открыт ключ 20 коммутатора 19 и на вход фильтра 9 нижних частот подключен источник опорного напряжения 4-Ц. При отсутствии импульса вход фильтра 9 нижних частот через ключ 21 коммутатора 19 соединен с общим приводом.
Таким образом, напряжение на вхо де фильтра 9 нижних частот равно
тт тт - Uor.if
бых, оп 7- - 7 + Г оГо
+ V
2Uon f 1 COScC
,После вычитания в преобразователе 10 уровня из выходного напряжения фильтра 9 нижних частот постоянной составляющей U j, 4f/fo получа- ется напряжение
„„Uon f2Uon fi- COSol,,
Uftbr U6b,x.- - f-p-V
бЬГХ 6blX
KV,
которое с точностью до постоянного масштабного коэффициента К соответствует действительной скорости движения машины. В случае необходимости это напряжение в преобразователе 10 уровня может быть дополнительно усилено и отфильтровано.
Сигнал, применяемый приемником 2 после отражения от статистически шероховатой грунтовой поверхности, имеет сильную паразитную амплитудную модуляцию. В отдельные моменты времени уровень сигнала на входе компаратора 6 недостаточен для его срабатывания. В этом случае проис- ходит пропадание отдельных импульсов импульсной последовательности с частотой F. Для повьш1ения точности измерений синхронизатор 8 выявляет эти моменты времени и переключает преобразователь 7 частоты в напряжение в третье состояние, обеспечивающее сохранение предащущего значения его выходного напряжения. Это осуществляется следующим образом. Выходное напряжение фильтра 9 нижних частот, пропорциональное частоте F, поступает на вход генератора 23 пилообразного напряжения. Скорость нарастания выходного напряже- ния генератора 23 пилообразного напряжения пропорциональна отношению выходного напряжения фильтра 9 ниж
Q
5
5
0
5 0 5 0 5
них частот к сопротивлению резистора (фиг. 2). Уровень срабатывания порогового блока 22 выбран таким образом, чтобы при наличии регулярной последовательности импульсов с периодом следования Т срабатывание порогового блока 22 не происходило, а синхронизатор 8 не оказывал влияния на выходной сигнал датчика.
При пропадании отдельных импульсов и соответствующем увеличении периода т Т происходит срабатывание порогового блока 22 и на логический блок 18 поступает высокий уровень потенциала. Это приводит -к одновременному закрыванию обоих ключей коммутатора 19, и на конденсаторе фильтра 9 нижних частот сохраняется предыдущий уровень напряжения. После прихода очередного импульса с частотой F открывается ключ 20 коммутатора 19, происходит разряд интегрирующего конденсатора в генераторе 23 пилообразного напряжения и далее процессы в устройстве повторяются.
При достаточно медленном изменении периода Т происходит синхронное изменение скорости нарастания выходного напряжения Генератора 23 пилообразного напряжения и соответствующая перестройка синхронизатора 8 на выявление резких отклонений периода следования выходных импульсов компаратора 6 от изменившегося среднего значения периода. Формула изобретения
Устройство измерения скорости движения землеройно-транспортных и сельскохозяйственных машин, содержащее последовательно соединенные приемник и синхронный детектор, второй выход которого соединен с первым выходом генератора, второй выход которого соединен с входом передатчика, фильтр нижних частот и регистратор, отличающееся тем, что, с целью повьшения точности, введены последовательно соединенные полосовой усилитель, компаратор и преобразователь частоты в напряжение, первый выход которого соединен с входом фильтра нижних частот, синхронизатор и преобразователь уровня сигнала, выход которого соединен с входом регистратора, при этом третий выход генератора соединен с вторым входом преобразователя частоты в напряжение, третий вход и второй выход которого соединены соответственно с первым выходом и первым
входом синхронизатора, второй вход которого соединен с выходом фильтра нижних частот и входом преобразователя уровня сигнала.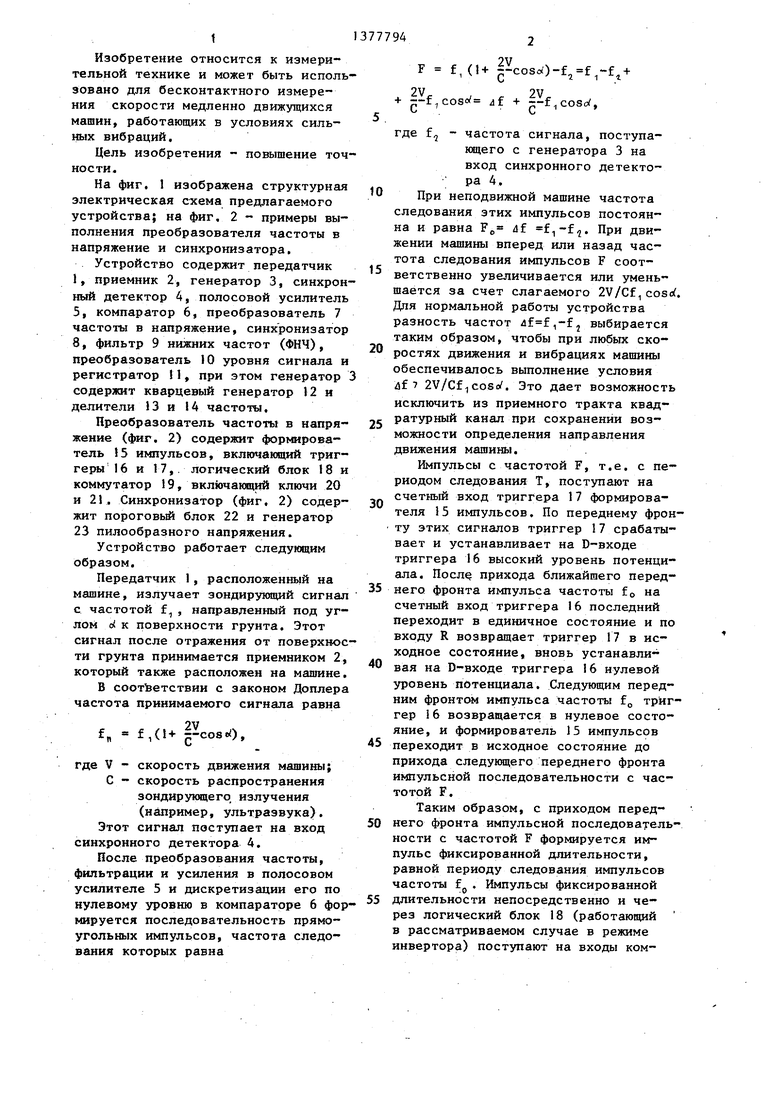
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитооптический гистериограф | 1982 |
|
SU1081579A1 |
| Устройство дистанционного зондирования подповерхностных слоев почвы | 1989 |
|
SU1684770A1 |
| Магнитооптический гистериограф | 1985 |
|
SU1302225A1 |
| МНОГОКАНАЛЬНЫЙ ПАНОРАМНЫЙ ПРИЕМНИК | 1996 |
|
RU2115997C1 |
| Измеритель частотных характеристик | 1990 |
|
SU1798721A1 |
| Цифроаналоговый синхронизатор | 1985 |
|
SU1288821A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| ШИРОКОДИАПАЗОННЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2002 |
|
RU2227272C2 |
| Устройство для проверки индуктивности магнитных головок | 1985 |
|
SU1273985A1 |
| Устройство для измерения скорости звука | 1990 |
|
SU1728672A1 |
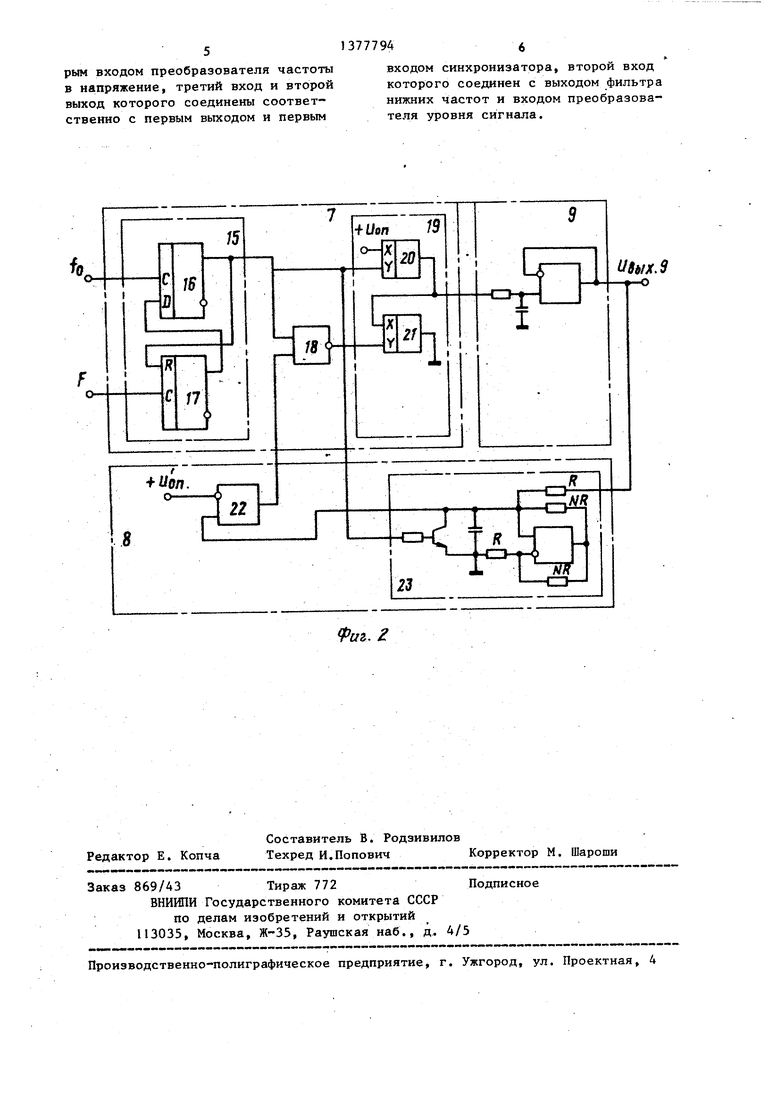
Изобретение относится к измерительной технике и может использо ваться для бесконтактного измерения скорости медленно движущихся машин, работающих в условиях сильных вибраций. Цель изобретения - повышение точности. Устр-во содержит передатчик 1, приемник 2, г-р 3, синхронный детектор 4, фильтр нижних частот 9 и регистратор 11. Г-р 3 содержит кварцевый генератор 12 и делители частоты 13 и 14. С целью повышения точности в устр-во введены последовательно соединенные полосовой усилитель 5, компаратор 6 и преобразователь частоты в напряжение, а также синхронизатор 8 и преобразователь уровня сигнала 10. Для нормальной работы устр-ва разность частот Af f,-f j(f - частота зондирующего сигнала, поступающего с передатчика 1, расположенного на машине; f - частота сигнала, поступающего с г-ра 3 на вход синхронного детектора 4) выбирается т. обр., чтобы при любых скоростях движения и вибрациях машины обеспечивалось выполнение условия uf 2V/C-f cose/, где V - скорость движения машины; С - скорость распространения зондирующего излучения. Это дает возможность исключить из приемного тракта квадратурный канал при сохранении возможности определения направления движения машины. 2 ил. i СЛ
/5
I I
3
18
uz.Z
iUon 19
х
20
4а
U8b/j(.3 -о
| Измеритель скорости сложного движения | 1979 |
|
SU813347A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
