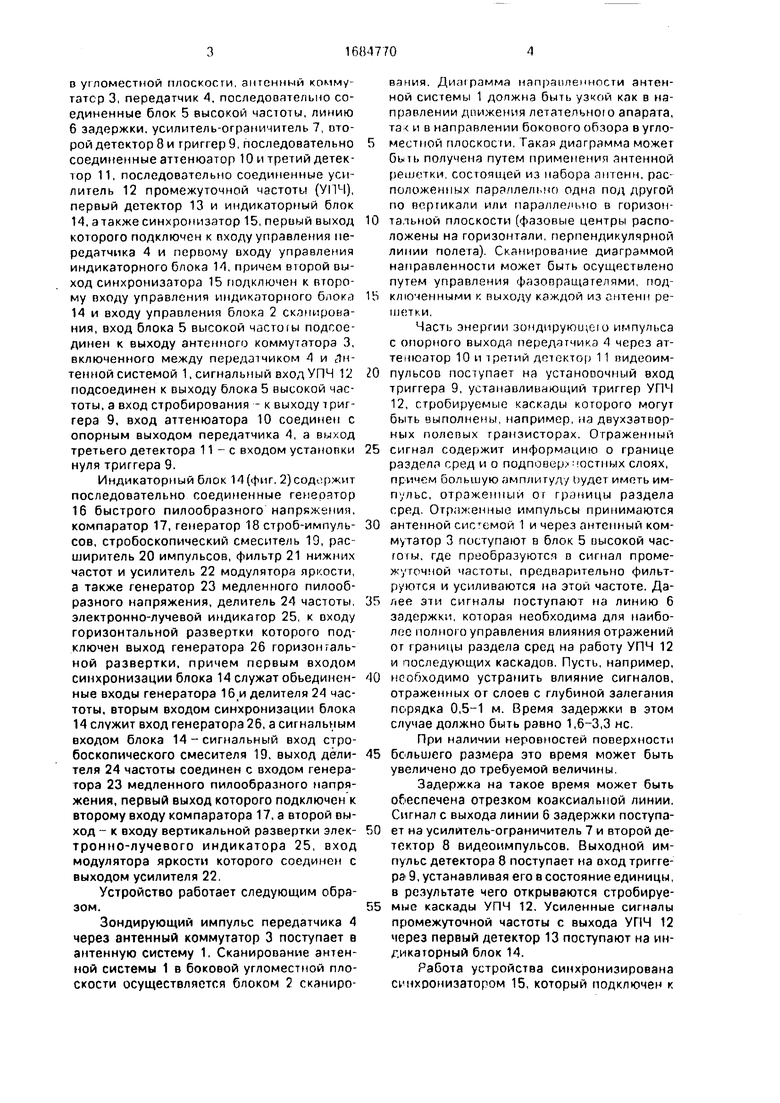
в угломестной плоскости, антенный коммутатор 3, передатчик 4, последовательно соединенные блок 5 высокой частоты, линию 6 задержки, усилитель-ограничитель 7, ото- рой детектор 8 и триггер 9, последовательно соединенные аттенюатор 10 и третий детектор 11, последовательно соединенные усилитель 12 промежуточной частоты (УПЧ), первый детектор 13 и индикаторный блок 14, атакже синхронизатор 15, первый выход которого подключен к входу управления передатчика 4 и первому входу управления индикаторного блока 14, причем второй выход синхронизатора 15 подключен к второму входу управления индикаторного блокл 14 и входу управления блока 2 сканирования, вход блока 5 высокой часто(ы подсоединен к выходу антенного коммутатора 3, включенного между передатчиком 4 и Дн- тенной системой 1, сигнальный вход УПЧ 12 подсоединен к выходу блока 5 высокой частоты, а вход стробирования - к выходу т риг- гера 9, вход аттенюатора 10 соединен с опорным выходом передатчика 4, а выход третьего детектора 11 - с входом установки нуля триггера 9.
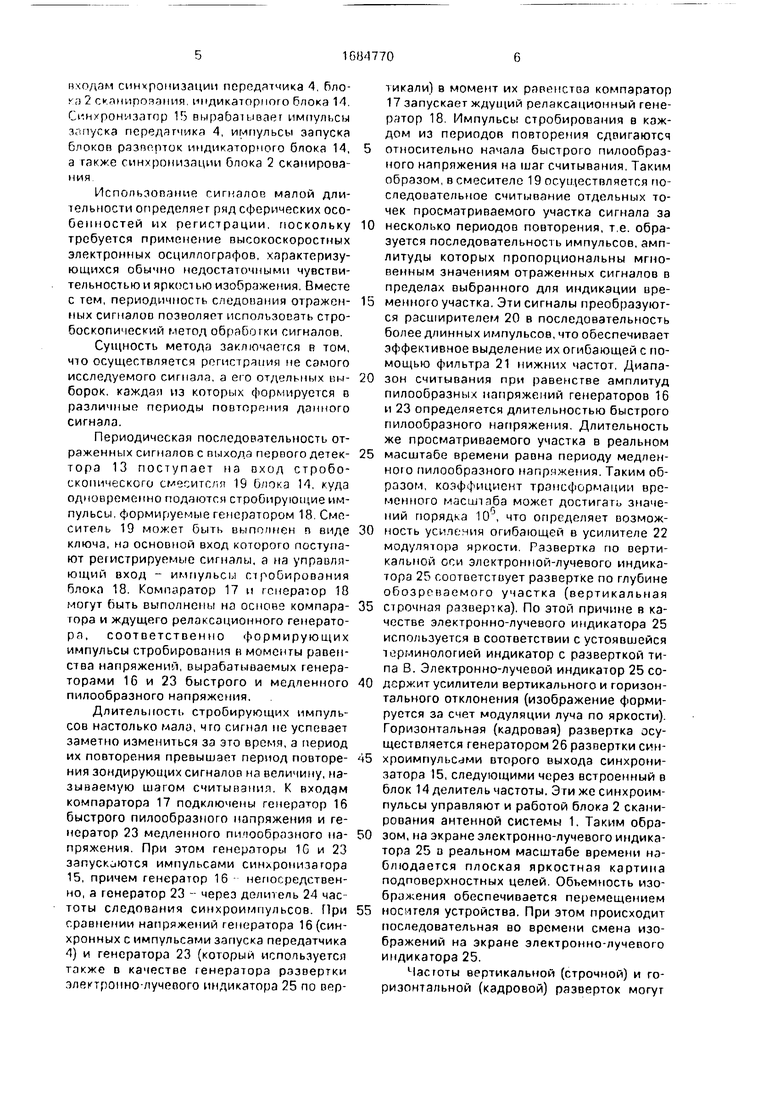
Индикаторный блок 14 (фиг. 2) содержит последовательно соединенные генеоатор 16 быстрого пилообразного напряжения, компаратор 17, генератор 18 строб-импульсов, стробоскопический смеситель 19, расширитель 20 импульсов, фильтр 21 нижних частот и усилитель 22 модулятора яркости, а также генератор 23 медленного пилообразного напряжения, делитель 24 частоты, электронно-лучевой индикатор 25, к входу горизонтальной развертки которого подключен выход генератора 26 горизонтальной развертки, причем первым входом синхронизации блока 14 служат объединенные входы генератора делителя 24 частоты, вторым входом синхронизации блока 14 служит вход генератора 26, а сигнальным входом блока 14 - сигнальный вход стробоскопического смесителя 19. выход делителя 24 частоты соединен с входом генератора 23 медленного пилообразного напряжения, первый выход которого подключен к второму входу компаратора 17, а второй выход - к входу вертикальной развертки электронно-лучевого индикатора 25, вход модулятора яркости которого соединен с выходом усилителя 22.
Устройство работает следующим образом.
Зондирующий импульс передатчика 4 через антенный коммутатор 3 поступает в антенную систему 1. Сканирование антенной системы 1 в боковой угломестной плоскости осуществляется блоком 2 сканирования. Днафамма направленности антенной системы 1 должна быть узкой как в направлении движения летательного апарага, та и в направлении бокового обзора в угломестной плоскости. Такая диаграмма может Оьпь получена путем применения антенной решетки, состоящей из набора лнгенн, расположенных параллельно одна под другой по вертикали или параллельно в горизон0 тальной плоскости (фазовые центры расположены на горизонтали, перпендикулярной линии полета). Сканирование диаграммой направленности может быть осуществлено путем управления фазовращателями, под5 ключенными к выходу каждой из антенн решетки.
Часть энергии зондирующею импульса с опорного выходл передатчика 4 через аттенюатор 10 и третий детектор 11 видеоим0 пульсоо поступает на устанопочный вход триггера 9, устанавливающий триггер УПЧ 12, стробируемые каскады которого могут быть выполнены, например, на двухзэтвор- ных полевых транзисторах. Отраженный
5 сигнал содержит информацию о границе раздела сред и о подповерхностных слоях, причем большую амплитуд/ Ьудет иметь импульс, отраженный от границы раздела сред. Отраженные импульсы принимаются
0 антенной системои 1 и через антенный коммутатор 3 поступают в блок 5 высокой час- готы, где преобразуются в сигнал промежуточной частоты, предварительно фильтруются и усиливаются на этой частоте. Да5 лее эти сигналы поступают на линию 6 задержки, которая необходима для наиболее полного управления влияния отражений от границы раздела сред на работу УПЧ 12 и последующих каскадов. Пусть, например,
0 необходимо устранить влияние сигналов, отраженных от слоев с глубиной залегания порядка 0,5-1 м. Время задержки в этом случае должно быть равно 1,6-3,3 не.
При наличии неровностей поверхности
5 большего размера это время может быть увеличено до требуемой величины.
Задержка на такое время может быть обеспечена отрезком коаксиальной линии. Сигнал с выхода линии 6 задержки поступа0 ет на усилитель-ограничитель 7 и второй детектор 8 видеоимпульсов. Выходной импульс детектора 8 поступает на вход триггера 9, устанавливая его в состояние единицы, в результате чего открываются стробируе5 мыс каскады УПЧ 12. Усиленные сигналы промежуточной частоты с выхода УПЧ 12 через первый детектор 13 поступают на индикаторный блок 14.
Работа устройства синхронизирована синхронизатором 15, который подключен к
«ходам синхронизации передатчика 4, бло- гэ 2 сканирования.индикаторного блока 14. Синхронизатор 15 вырабатывает импульсы запуска передатчика 4, импульсы запуска блоков рязперток индикаторного блока 14, а также синхронизации блока 2 сканирования
Использование сигналов малой длительности определяет ряд сферических особенностей их регистрации, поскольку требуется применение высокоскоростных электронных осциллографов, характеризующихся обычно недостаточными чувствительностью и яркост ью изображения. Вместе с тем, периодичность следования отраженных сигналов позволяет использовать стробоскопический метод обработки сигналов.
Сущность метода заключается в том, что осуществляется регистрация не самого исследуемого сигнала, а его отдельных выборок, каждая из которых формируется в различные периоды повторения данного сигнала.
Периодическая последовательность отраженных сигналов с выхода первого детектора 13 поступает на вход стробоскопического смесителя 19 блока 14, куда одновременно подаются стробирующие импульсы, формируемые генератором 18, Смеситель 19 может быть выполнен п виде ключа, но основной вход которого поступают регистрируемые сигналы, а на управляющий вход - импульсы глробирования блока 18. Компаратор 17 и генератор 18 могут быть выполнены на основе компаратора и ждущего релаксационного генератора, соответственно формирующих импульсы стробирования в моменты равенства напряжений, вырабатываемых генераторами 16 и 23 быстрого и медленного пилообразного напряжения.
Длительность стробирующих импульсов настолько мала, чго сигнал не успевает заметно измениться за это время, а период их повторения превышает период повторения зондирующих сигналов на величину, называемую шагом считывания. К входам компаратора 17 подключены генератор 16 быстрого пилообразного напряжения и генератор 23 медленного пилообразного напряжения. При этом генераторы 1G и 23 запускаются импульсами синхронизатора 15, причем генератор 16 непосредственно, а генератор 23 - через делитель 24 частоты следования синхроимпульсов. При сравнении напряжений генератора (синхронных с импульсами запуска передатчика 4) и генератора 23 (который используется также о качестве генератора развертки электронно-лучевого индикатора 25 по вертикали) в момент их равенства компаратор 17 запускает ждущий релаксационный генератор 18. Импульсы стробирования в каждом из периодов повторения сдвигаются
относительно начала быстрого пилообразного напряжения на шаг считывания. Таким образом, в смесителе 19 осуществляется последовательное считывание отдельных точек просматриваемого участка сигнала за
0 несколько периодов повторения, т.е. образуется последовательность импульсов, амплитуды которых пропорциональны мгновенным значениям отраженных сигналов в пределах выбранного для индикации вре5 менного участка. Эти сигналы преобразуются расширителем 20 в последовательность более длинных импульсов, что обеспечивает эффективное выделение их огибающей с помощью фильтра 21 нижних частот. Диапа0 зон считывания при равенстве амплитуд пилообразных напряжений генераторов 16 и 23 определяется длительностью быстрого пилообразного напряжения. Длительность же просматриваемого участка в реальном
5 масштабе времени равна периоду медленною пилообразного напряжения. Таким образом, коэффициент трансформации временного масштаба может достигать значений порядка 10J, что определяет возмож0 ность усиления огибающей в усилителе 22 модулятора яркости. Развертка по вертикальной оси электронной-лучевого индикатора 25 соответствует развертке по глубине обозреваемого участка (вертикальная
5 строчная развертка). По этой причине в качестве электронно-лучевого индикатора 25 используется в соответствии с устоявшейся терминологией индикатор с разверткой типа В. Электронно-лучевой индикатор 25 со0 держит усилители вертикального и горизонтального отклонения (изображение формируется за счет модуляции луча по яркости). Горизонтальная (кадровая) развертка осуществляется генератором 26 развертки син5 хроимпульсс)ми второго выхода синхронизатора 15, следующими через встроенный в блок 14 делитель частоты. Эги же синхроимпульсы управляют и работой блока 2 сканирования антенной системы 1. Таким обра0 зом, на экране электронно-лучевого индикатора 25 а реальном масштабе времени наблюдается плоская яркостная картина подповерхностных целей. Объемность изображения обеспечивается перемещением
5 носителя устройства. При этом происходит последовательная во времени смена изображений на экране электронно-лучевого индикатора 25,
Частоты вертикальной (строчной) и горизонтальной (кадровой) разверток могут
варьироваться в широких пределах в зависимости от скорости движения летательного аппарата. Эта скорость может изменяться от нулевого значения (для неподвижных вертолетов) до сотен метров в секунду. Введение новых элементов функциональной схемы позволяет получить более высокую помехоустойчивость устройства по отношению к мешающим отражениям от границы раздела воздух - почва и более достоверную информацию о структуре подповерхностных слоев почвы за счет подавления мешающих отражений и формирования объемного изображения. Формула изобретения Устройство дистанционного зондирования подповерхностных слоев почвы, содержащее передатчик, антенную систему, антенный коммутатор, выход которого подключен к входу последовательно соединенных блока высокой частоты усилителя промежуточной частоты, первого детектора и индикаторного блока, блок сканирования диаграммой направленности, выход которого подключен к входу управления антенной
системой, и синхронизатор, первый выход которого подключен к входу управления передатчика и первому входу синхронизации индикаторного блока, причем второй выход
синхронизатора подключен к входу управления блока сканирования и второму входу синхронизации индикаторного блока, а антенный коммутатор включен между передатчиком и антенной системой, отличающ е е с я тем, что, с целью повышения помехозащищенности и разрешающей способности измерений за счет исключения отражений от поверхности раздела воздух - почва, в него введены последовательно соединенные линия задержки, усилитель-ограничитель, второй детектор и триггер, выход которого подключен к входу строби- рования усилителя промежуточной частоты, а также последовательно соединенные аттенюатор и третий детектор, выход которого подключен к входу установки нуля триггера, причем вход линии задержки соединен с выходом блока высокой частоты, а вход аттенюатора подключен к опорному выходу
передатчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2010 |
|
RU2433423C1 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ВЫСОТЫ И МЕСТНОЙ ВЕРТИКАЛИ ДЛЯ ВЕРТОЛЕТОВ И КОСМИЧЕСКИХ АППАРАТОВ ВЕРТИКАЛЬНОЙ ПОСАДКИ | 1995 |
|
RU2083998C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2013 |
|
RU2530288C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| УСТРОЙСТВО ДЛЯ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 1994 |
|
RU2080622C1 |
| Устройство для определения подповерхностной структуры слоистых земных покровов | 1988 |
|
SU1562883A1 |
| ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1985 |
|
SU1840927A1 |
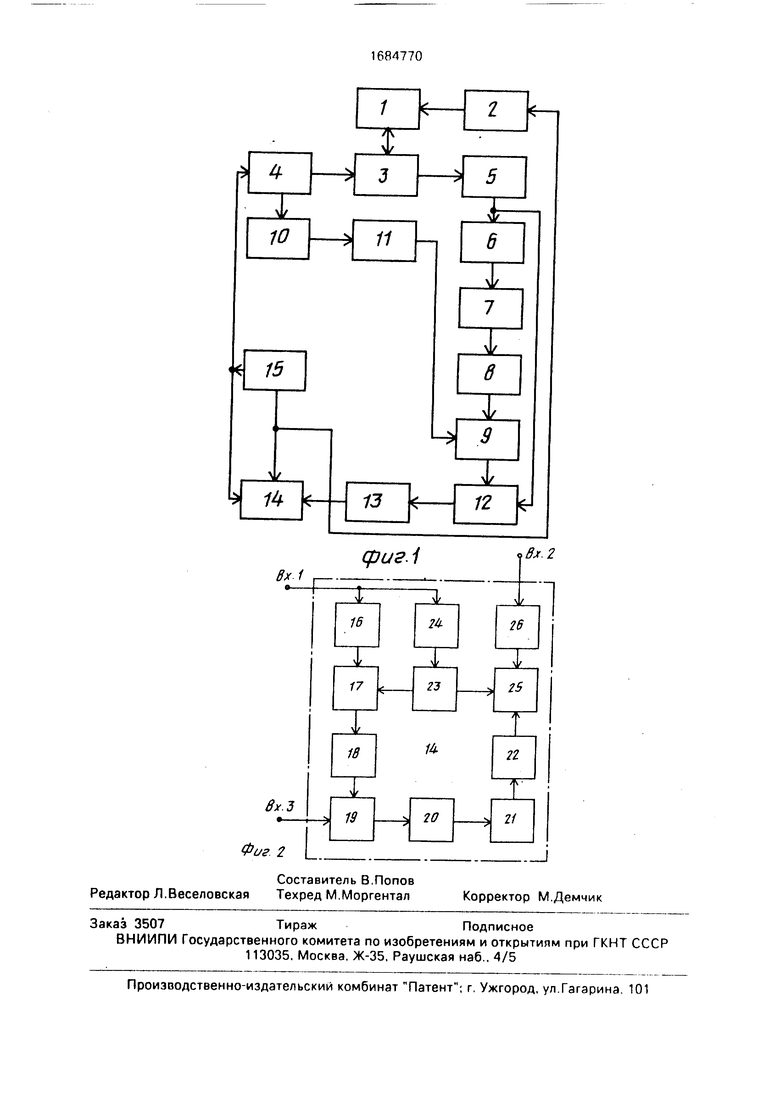
Изобретение относится к геофизике и может быть использовано при решении задач электроразведки с помощью радиолокаторов бокового обзора, установленных на борту летательных аппаратов. Цель изобретения - повышение помехозащищенности и разрешающей способности исследований за счет исключения отражений от поверхности раздела воздух - почва. Устройство содержит антенную систему, устройство Изобретение относится к геофизике и может быть использовано при решении задач электроразведки с помощью.рэдиолока- торов бокового обзора, установленных на борту летательных аппаратов. Цель изобретения-повышение помехозащищенности и разрешающей способности изменений за счет исключения отражений от поверхности раздела воздух - почва. сканирования диаграммой направленности, которое подключено к антенной системе, антенный коммутатор, подключенный к выходу антенны, передатчик, подключенный к другому входу антенного коммутатора, блок высокой частоты, входом соединенный с выходом антенното коммутатора и включающий в себя преобразователь частоты с предварительным усилителем промежуточной частоты, последовательно соединенные линию задержки, усилитель-органичитель, второй детектор видеоимпульсов, триггер. второй вход которого соединен через аттенюатор и третий детектор видеоимпульсов с входом передатчика, а выход триггера соединен со стробируемым входом основного усилителя промежуточной частоты, сигнальный вход которого соединен с входом первого детектора видеоимпульсов, выход которого подключен к входу индикаторного устройства со стробоскопическим преобразователем. Работа всей радиосистемы синхронизируется синхронизатором, который подключен к входам синхронизации передатчика, индикаторного устройства и устройства сканирования. 2 ил. На фиг. 1 представлена структурная схема устройства дистанционного зондирования подповерхностных слоев почвы; на фиг. 2 - структурная схема индикаторного блока этого устройства. Устройство дистанционного зондирования подповерхностных слоев почвы (фиг, 1) содержит антенную систе;му 1, к входу управления которой подключен выход бпока 2 сканирования диаграммой направленности (Л С о 00 Јь Ч х| О
Фиг 2
Составитель В.Попов Редактор Л.Веселовская Техред М.Моргентал
.I
Корректор М.Демчик
| Устройство высокочастотной геоэлектроразведки | 1986 |
|
SU1427321A1 |
| Радиолокационные методы исследования Земли/Под ред | |||
| Ю.А.Мельника, М.: Сов | |||
| радио, 1985, с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
