со
оо
со ОО
4
tftvf.e
Изобретение относится к неразрушающему контролю и может быть использовано в ультразвуковой дефектоскопии для получения преобразователей с малыми допусками параметров.
Целью изобретения является повышение качества управления путем создания способа изготовления пъезокерами- ческих преобразователей с уменьшенным iо отклонением коэффициента преобразования.
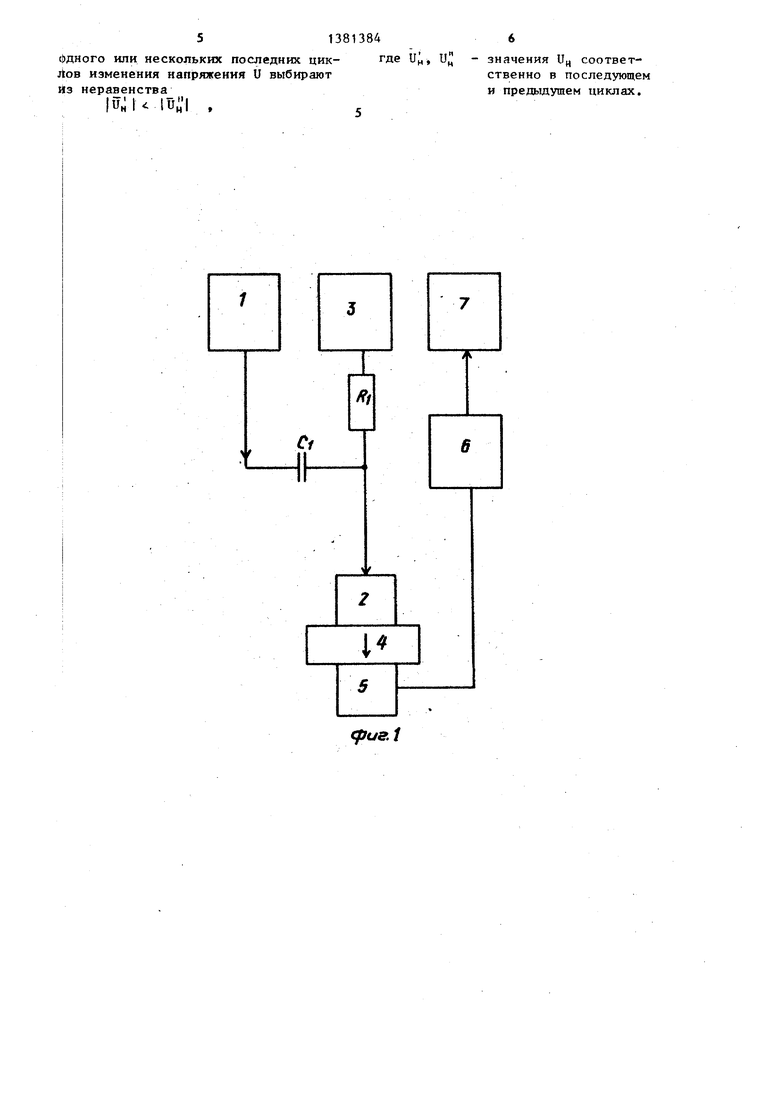
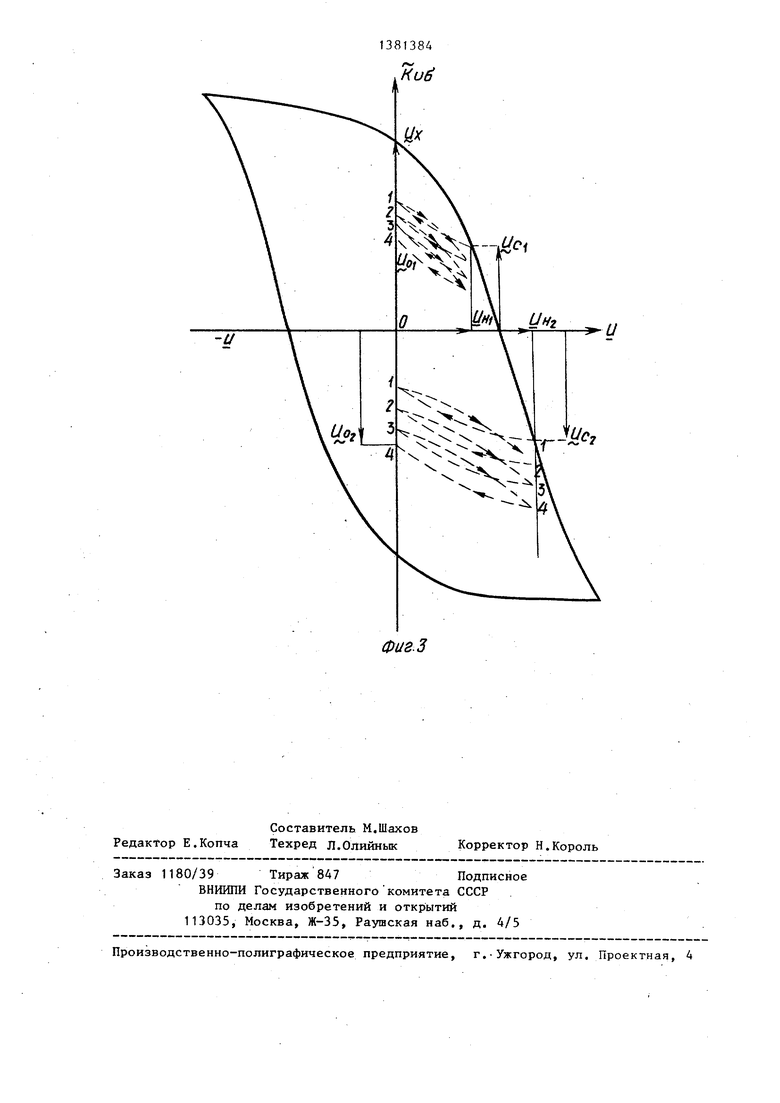
На фиг.1 изображена блок-схама устройства для реализации предлагаемого способа в случае, когда, контро- 15 лируемый и вспомогательный преобразователи установлены на акустическую нагрузку из твердого тела (в качестве излучателя использован контролируемый преобразователь, а приемником 20 вспомогательный преобразователь)j на фиг.2 - блок-схема устройства для реализации предлагаемого способа, когда преобразователь нагружен на жидкую среду и работает в совмещенном 25 режиме; на фиг.З - график зависимости относительного измерения коэффициентов преобразования K.j- от электрического напряжения U (сплошная линия для случая, когда U меняется (по за- 30 кону) от О до и, от и до О, от О до -у, от -и до 0. Пунктиром показано изменение U для четырех циклов изменения и, при изме.нении U по закону от О до и, от у„ до 0. Вверху пока- з5 зано, когда Ус- Ух (Ц. Ц), внизу - для случая П, 11 (Ux- Ut UQ
Устройство для реализации предлагаемого способа (фиг.О содержит ге- нератор 1 электрических импульсоы, 40 по дключенный через разделительныР: конденсатор С, к пьезокерамическому преобразователю с номинальным знс1че- нием коэффициента преобразования или контролируемому пьезокерамическому 45 преобразователю 2, подключенному через ограничительный высокоомный ре- зистор R, к источнику 3 постоянного напряжения и установленному на акустическую нагрузку 4, на противополож- ,« ной рабочей стороне которой установлен вспомогательньй преобразователь 5, Последний соединен с широкополосным усилителем 6, выход которого соединен с индикатором 7 (осциллогра- 5 .фом).
Устройство для реализации предлагаемого способа при совмещенном методе контроля с нагрузкой на жидкую
среду (фиг.2) содержит генератор 1 электрических импульсов, подключенный через разделительный конденсатор С , к пьезокерамическому преобразователю с номинальным значением коэффициента преобразования или контролируемому пьезокерамическому преобразователю 2, подключенному через ограничительный резистор R, к источнику 3 постоянного напряжения и установленному на акустическую нагрузку - в иммерсионную ванну с жидкостью 4, на основании которой установлен плоский отражатель 5. Контролируемый преобразователь 2 одновременно соединен через конденсатор С с широкополосным усилителем 6, далее соединенным с индикатором 7. Конденсатор С, предназначен для защиты входа усилителя 6 от напряжения поляризации. Резистор R служит для стекания заряда с конденсатора С ,
Способ реализуют следующим образом.
Устанавливают на одну из рабочих поверхностей акустической нагрузки 4 вспомогательный преобразователь 5, а на противоположную рабочую поверхность акустической нагрузки 4 - пъе- зокерамический преобразователь с номинальным значением коэффициента преобразования 2. Возбуждают ультразвуковые колебания в акустической нагрузке 4 преобразователем 2 от генератора 1. Принятые вспомогательным преобразователем 5 сигналы подают на усилитель 6. Фиксируют амплитуду и полярность по индикатору осциллографа,7. Затем на место пьезокерамичес- кого преобразователя с ном1шальным коэффициентом преобразования устанавливают контролируемый пьезокерамичес- кий преобразователь 2 и проводят повторные измерения. Сравнивают амплитуду и полярность сигналов номинального и контролируемого преобразователей. Если амплитуда и/или полярность контролируемого преобразователя отличается от амплитуды и/или полярности номинального, то подают на контролируе- мьй пьезокерамический преобразователь 2 постоянное напряжение от источника 3, выбирают направление управления в зависимости от полученных соотно- щений между значениями амплитуд и полярностей принятых сигналов. Включают встречно постоянное напряжение внутреннему полю пьезопластины, если
|U, | и импульсы одной полярности, следят за изменением амплитуды Ug, чтобы lUxi I Uc 1 Ugl , при плавном многократном изменении постоянно- го напряжения от О до U и обратно до 0. Повторяют изменение направления до получения наименьшей разности IUj.-yol . Включают напряжения поляризации согласно внутреннему полю пье- зопластины контролируемого преобразователя, если ) и принимаемые импульсы одной полярности, следят за изменением амплитулы JJ, чтобы lUol |Уе| |Ux|, при плавном многократ- ном изменении амплитуды от О до Оц и обратно до 0. Повторяют изменение напряжения до получения наименьшей . разности lUj.-Uo| . Включают напряжение поляризации встречно внутреннему полю пьезопластины испытуемого преобразователя, следят, чтобы lUd lUj,| при плавном многократном изменении постоянного напряжения от О до U и обратно до О, где |Uj,| I Ец|- 1. Повторяют изменение напряжения до получения наименьшей разности IUc-Uo| .
Формула изобретения
1. Способ управления пьезокерами- ческим преобразователем, заключающий .ся в том, что устанавливают на акустическую нагрузку вспомогательный пьезокерамический преобразователь и/или крнтролируемьй пьезокерамический преобразователь, возбуждают в акустической нагрузке вспомогательным или контролируемым пьезокерами- ческим преобразователем акустические колебания, принимают их одним из преобразователей, фиксируют значения амплитуды принятого электрического сигнала, подают на контролируемый пьезокерамический преобразователь электрическое постоянное напряжение и и изменяют его значения, о т л и - чающийся тем, что, с целью повышения качества управления путем уменьшения отклонения коэффициента преобразования, заменяют контролируемый пьезокерамический преобразовател на пьезокерамический преобразователь с номинальным значением коэффициента преобразования, фиксируют значение и полярность амплитуды принятого : электрического сигнала, снимают пьезокерамический преобразователь с номинальным значением коэффициента пра
Q }5 0 5
30
35
Q 5 п
5
образования, устанавливают контролируемый, пьезокерамический преобразователь, фиксируют значения и полярность амплитуды электрического сигнала, подают на него электрическое напряжение, создающее электрическое поле, встречное внутреннему полю пьезоэлемента контролируемого пьезо- керамического преобразователя, когда . или полярности Уц и УУ различны, и согласное электрическое поле, когда ( , плавно изменяют напряжение|и от О до UH и обратно до О, повторяют изменение напряжения до получения наименьшей разности причем значение подаваемого напряжения устанавливают соответствующим условиям:
Ш 1УсЬ lyj при luj lyj и. одинаковой полярности U ,
Шс1 при 1Уо1 одинаковой полярности U, и, lUj,| IU-Q Т при различных полярно- |и„1 |Ек1 1 , Uo,
где и - значения амплитуды электрического сигнала, зафиксированное при установке пьеэо- керамического преобразователя с номинальным значением коэффициента преобразования; Uy - значение амплитуды принятого электрического сигнала, зафиксированное при установке контролируемого пьезокера- мического преобразователя до подучи постоянного напря- жения U;
Up - значение амплитуды принятого электрического сигнала, зафиксированное при установке контролируемого пьезокерами- ческого преобразователя при в первом цикле изменения и от О до Пц; наибольшее значение электрического на;пряжения U; Е - напряженность коэрцитивного поля в пьезоэлементе контро-. лируемого пьезокерамическо- го преобразователя до подачи электрического напряжения 0; 1 - толщина пьезоэлемента контролируемого пьезокерамичес- кого преобразователя,
2, Способ ПОП.1, отличающийся тем, что значения U
Одного или нескольких последних цик- JkoB изменения напряжения U выбирают Из неравенства
|ин1 1ин1
где и и
- значения V соответственно в последующем и предьщушем циклах.
и
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсно-фазовое устройство для контроля толщины | 1990 |
|
SU1747894A1 |
| Устройство для считывания графической информации | 1981 |
|
SU1005103A1 |
| Способ измерения частотной характеристики объекта | 1987 |
|
SU1698651A1 |
| Пьезоэлектрический привод гибкого магнитного диска | 1987 |
|
SU1582201A1 |
| Способ поляризации пьезокерамических элементов | 1979 |
|
SU918284A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ АКУСТИЧЕСКОЙ ЭМИССИИ | 1996 |
|
RU2110792C1 |
| Ультразвуковой пьезоэлектрический преобразователь | 1990 |
|
SU1757760A1 |
| Способ изготовления образца материала пьезокристаллических преобразователей для механических испытаний | 1990 |
|
SU1727026A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2240073C1 |
| Пьезополупроводниковый стабилизатор постоянного напряжения | 1987 |
|
SU1408506A2 |
Изобретение относится к области неразрушающего контроля. Цель изобретения - повьшение качества управления путем создания способа изготовления пьез.окерамических преобразователей с уменьшенным отклонением коэффициента преобразования. Устанавливают на одну из рабочих поверхностей акустической нагрузки 4 преобразователь 5, а на противоположную поверхность - контролируемый пьезопреобра- зователь 2. Возбуждают ультразвуковые колебания в акустической нагрузке 4 от генератора 1. Принятые преобразователем 5 сигналы подают на усилитель 6. Сравнивают амплитуду и полярность сигналов номинального и контролируемого преобразователей. Если амплитуды и полярности номинального и контролируемого преобразователей отличаются, то на последний подают постоянное напряжение от источника 3 и выбирают направление управления в зависимости от полученных соотношений между значениями амплитуд и полярностей принятых сигналов.. 1 з.п. ф-лы, 3 ил. i (Л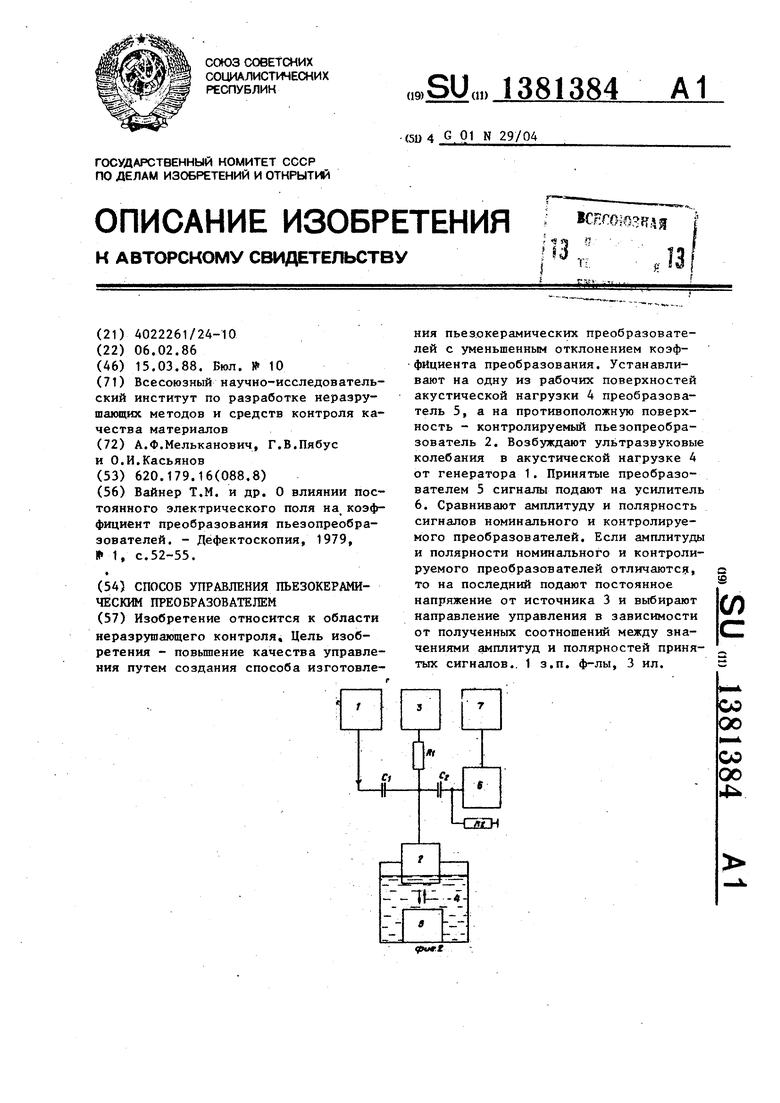
фигЗ
| Вайнер Т.Н | |||
| и др | |||
| О влиянии постоянного электрического поля на коэффициент преобразования пьезопреобра- зователей | |||
| - Дефектоскопия, 1979, Я 1, с.52-55 |
