со
00 00 N5
00 ю
Изобретение относится к робототехнике, а именно к устройствам для очувствления захватов и корпусов промышленных роботов.
Целью изобретения является упрощение конструкции и расширение функциональных возможностей за счет возможности определения места приложения и величины нагрузки, а также регулировки чувствительности датчика.
Полости трубок 2 и 3, а также полости 5 и 6 заполнены рабочей средой - жидкостью или газом.
Выходы тензорезисторов соединяются со входами системы обработки сигналов (не показаны).
Матричный тактильный датчик работает следующим образом.
При касании датчика плоскостью 21 объекта последний воздействует на нажимНа фиг. 1 представлен матричный так- Ю ные элементы 17. Эти элементы передают тильный датчик, общий вид; на фиг. 2 - раз- давление на трубки 3 и через стенки 16
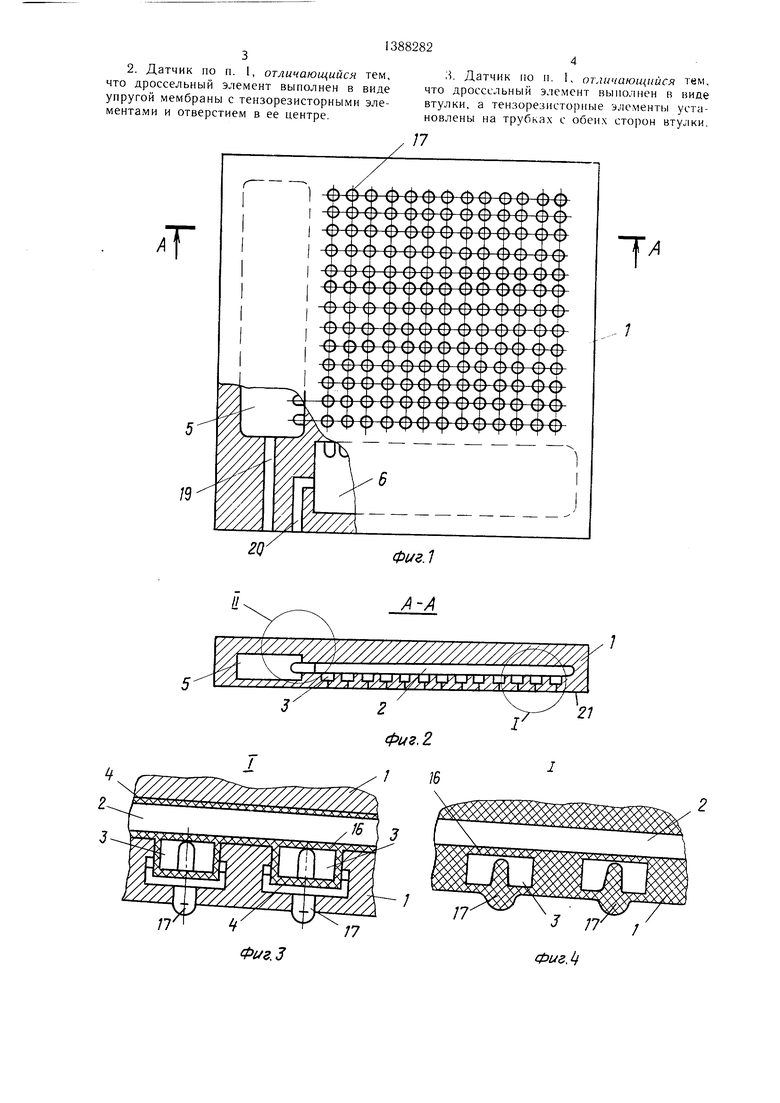
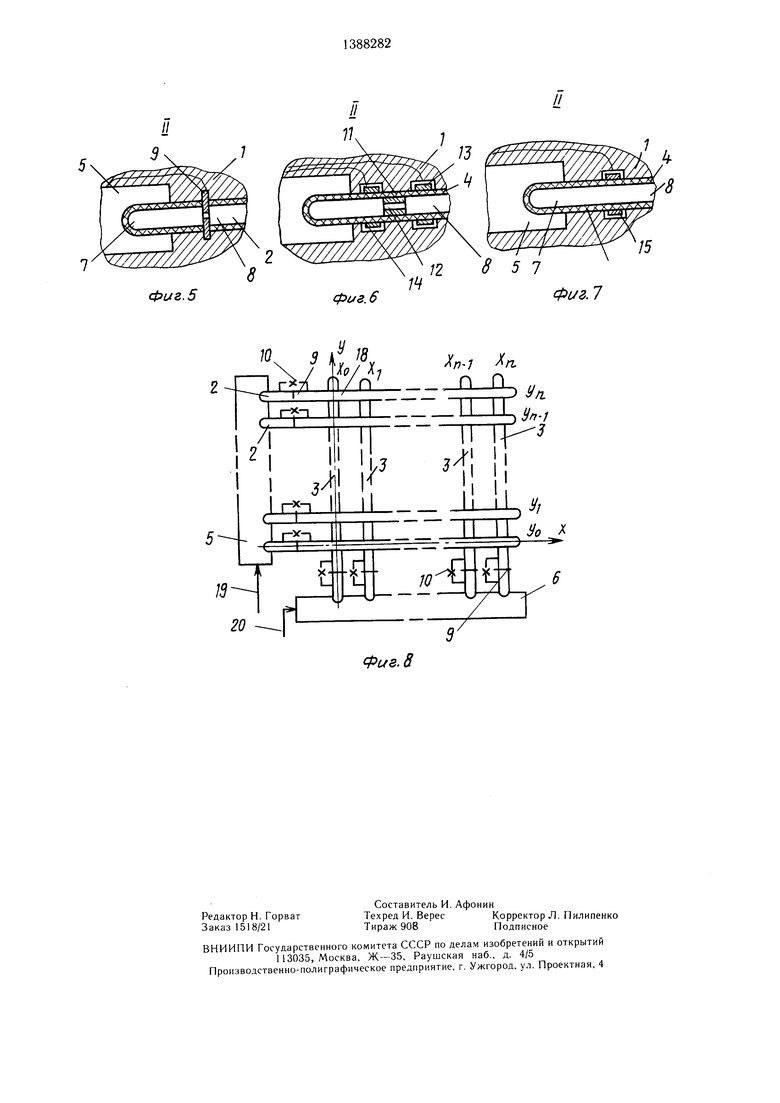
трубкам 2. Повыщение давления в полостях 8 трубок 2 и 3 воспринимается тензорез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 2, вариант 1; на фиг. 4 - то же, вариант 2, на фиг. 5 - узел II на фиг. 2, вариант 1; на фиг. 6 - то же, вариант 2; на фиг. 7 - . висящее от геометрических характеристик то же, вариант 3; на фиг. 8 - принципиаль- дроссельных отверстий 10 (12) давление в ная схема матричного тактильного датчика. Матричный тактильный датчик состоит из пластины 1, в которой размещены замкнутые полости 2 и 3, выполненные в виде трубок со стенками 4 с прямоуголь- 20 отпускании объекта прекращается воздейст- ным или круглым поперечным сечением (на вие на элементы 17. Давление на трубки 3 фиг. 3 и 4 показаны трубки с прямоугольным поперечным сечением). В варианте 2 (фиг. 4) замкнутые полости выполнены нерезисторами. Через некоторое время заполостях 7 и 8 уравновешивается за счет перетекания жидкости через дроссельное отверстие. Сигнал исчезает. В варианте конструкции по фиг. 7 сигнал сохраняется. При
посредственно в пластине 1, изготовленной из
прекращается, что ведет к снижению давления в полостях 8. Создается перепад давления в полостях 7 и 8. Жидкость начинает перетекать из полостей 7 в полости
эластичного материала, трубки расположе- - 8. Появляется сигнал обратного знака на ны в два слоя. В каждом слое оси трубок параллельны друг другу. Оси трубок, расположенных в разных слоях, пересекаются в плане под произвольным углом (на фиг. 2 и 8 оси ортогональны).
Трубки 2 и 3 в каждом слое с одной стороны выходят в уравнительные полости 5 и 6 соответственно.
Каждая трубка разделена на две части
тензорезистивных датчиках.
Место расположения объекта, воздействующего на датчик, определяется тем, на какие именно элементы 17 оказывается .,,-. давление по координатному методу (фиг. 8). Точное расположение объекта на датчике и величина усилия определяется системой обработки сигнала.
Датчик начинает воспринимать только
в этих полостях, можно изменять порог чувствительности датчика.
нагрузку, создающую давление на элементы (полости) 7 и 8, например мембранами 9, ос 17, превышающее давление в полостях имеющими центральное отверстие 10, вы-5 и 6. Таким образом, изменяя давление
полняющее роль дросселя с турбулентным режимом течения. В варианте исполнения, представленном на фиг. 6, трубки разделяются на две части втулкой 11 с отверстием 12, выполняющим роль дросселя с лами- 40 нарным режимом течения. На мембране 9 напылением выполнены тензорезисторы. В варианте конструкции на фиг. 6 тензорезисторы напылены на кольца 13 и 14, либо неФормула изобретения
. Матричный тактильный датчик, содержащий пластину с замкнутыми полостями, заполненными рабочей средой, и тензоре- зисторные элементы, отличающийся тем, что, с целью упрощения конструкции и расщипосредственно на стенке 4 вместо колец 13 . рения функциональных возможностей, и 14. В варианте конструкции по фиг. 7 замкнутые полости выполнены в виде кон- трубки не разделяются на две части, а тензорезисторы напылены на кольцо 15 или
тактирующих между собой двух слоев упругих трубок, сообщающихся через дроссельные элементы с общей уравнительной полостью, причем в каждом из слоев труб- Трубки 2 и 3 в слоях взаимодействия о расположены параллельно одна другой
друг с другом через разделяющие их стен-и под углом к трубкам другого слоя, тензорезисторные элементы установлены в каждой из трубок, а трубки одного из слоев имеют возможность контакта с дополнительно введенными нажимными элементаной пересечением осей трубок (фиг. 1 и 8). 55 ми, которые установлены на рабочей по- Полости 5 и 6 соединены каналами верхности датчика в местах, соответствующих точкам пересечения осей трубок обоих слоев.
непосредственно на трубку вместо кольца 15.
ки 16.
Нижний слой трубок 3 взаимодействует с нажимными элементами 17. Элементы 17 расположены в узлах 18 сетки, -образован19 и 20 с системой управления чувствительностью датчика (не показано).
Полости трубок 2 и 3, а также полости 5 и 6 заполнены рабочей средой - жидкостью или газом.
Выходы тензорезисторов соединяются со входами системы обработки сигналов (не показаны).
Матричный тактильный датчик работает следующим образом.
При касании датчика плоскостью 21 объекта последний воздействует на нажим ные элементы 17. Эти элементы передают давление на трубки 3 и через стенки 16
трубкам 2. Повыщение давления в полостях 8 трубок 2 и 3 воспринимается тензовисящее от геометрических характеристик дроссельных отверстий 10 (12) давление в отпускании объекта прекращается воздейст- вие на элементы 17. Давление на трубки 3
резисторами. Через некоторое время зависящее от геометрических характеристик дроссельных отверстий 10 (12) давление в отпускании объекта прекращается воздейст- вие на элементы 17. Давление на трубки 3
полостях 7 и 8 уравновешивается за счет перетекания жидкости через дроссельное отверстие. Сигнал исчезает. В варианте конструкции по фиг. 7 сигнал сохраняется. При
висящее от геометрических характеристик дроссельных отверстий 10 (12) давление в отпускании объекта прекращается воздейст- вие на элементы 17. Давление на трубки 3
прекращается, что ведет к снижению давления в полостях 8. Создается перепад давления в полостях 7 и 8. Жидкость начинает перетекать из полостей 7 в полости
8. Появляется сигнал обратного знака на
8. Появляется сигнал обратного знака на
тензорезистивных датчиках.
Место расположения объекта, воздействующего на датчик, определяется тем, на какие именно элементы 17 оказывается давление по координатному методу (фиг. 8). Точное расположение объекта на датчике и величина усилия определяется системой обработки сигнала.
Датчик начинает воспринимать только
в этих полостях, можно изменять порог чувствительности датчика.
Формула изобретения
. Матричный тактильный датчик, содержащий пластину с замкнутыми полостями, заполненными рабочей средой, и тензоре- зисторные элементы, отличающийся тем, что, с целью упрощения конструкции и расщирения функциональных возможностей, замкнутые полости выполнены в виде кон-
2. Датчик по п. 1, отличающийся тем, что дроссельный элемент выполнен в виде упругой мембраны с тензорезисторными элементами и отверстием в ее центре.
3. Датчик по п. 1, отличающийся тем, что дроссельный элемент выполнен в виде втулки, а тензорезисторные элементы установлены на трубках с обеих сторон втулки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК АБСОЛЮТНОГО ДАВЛЕНИЯ НА ОСНОВЕ КНИ МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ | 2015 |
|
RU2609223C1 |
| МАТРИЦА ИНТЕГРАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ДАВЛЕНИЯ | 2007 |
|
RU2362236C1 |
| Частотный преобразователь для тензодатчиков | 1985 |
|
SU1270547A1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ГИБОЧНЫХ РАБОТ И РАЗВАЛЬЦОВКИ | 2002 |
|
RU2221663C2 |
| Кран машиниста | 1989 |
|
SU1787837A1 |
| Тензорезисторный манометр | 1990 |
|
SU1775625A1 |
| Устройство для взвешивания грузов на кране | 1985 |
|
SU1244078A1 |
| Холодильная установка | 1989 |
|
SU1740917A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2658124C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК ДАВЛЕНИЯ НА ОСНОВЕ ТОНКОПЛЕНОЧНОЙ НАНО- И МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ | 2009 |
|
RU2391640C1 |
Изобретение относится к области робототехники, а именно к устройствам для очувствления захватов и корпусов промышленных роботов. Цель изобретения - упрощение конструкции и расширение функциональных возможностей. В датчике, содержащем пластину с замкнутыми полостями, заполненными рабочей средой, и тен- зорезисторные элементы, полости выполнены в виде упругих трубок, расположенных в двух контактирующих между собой слоях. Трубки одного слоя расположены параллельно друг другу и под углом к трубкам другого слоя, образуя сетку, в каждом узле которой один из слоев трубок взаимодействует с нажимными элементами, установленными на рабочей поверхности датчика. Каждая из трубок через свой дроссельный элемент соединяется с общей уравнительной полостью. Тензорезистор- ные элементы установлены в каждой трубке. 2 з.п. ф-лы. 8 ил.
(ИИИИНН
W
/ / .„A.i. r/iT г чг I fi f f- . f--
/ / / / 7 / J
,/
/7
Фиг.З
ФигЛ
А-А
/
фиг. 6
5
(7 n
/5.
С
r-x-1
I
) У ft
I ry-i
TTTp lii
I
и
Т I j
0 1
//
851
,j TV/
TZIZfZf L
Фиг. 7
(7 n
/5.
) У ft
I
ГГТГ/.х
10
. Ь
7
,/
Фиг. 8
| Тактильный сенсор промышленного робота | 1981 |
|
SU1074711A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
