Изобретение относится к промышленным роботам, а именно к сенсорным устройствам для очувствления захватов и корпусов промышленных роботов.
Известны захваты промышленных роботов 1 и 2.
Однако они обладают неысокой надежностью, особенно при работе с предметами, имеюшими дискретные поверхности, в связи с тем, что рабочие поверхности захватов очувствлены в них частично.
Наиболее близким по технической суш,ности и достигаемому результату к изобретению является тактильный сенсор, выполненный в виде поверхности захватного устройства, чувствительный к прикладываемому давлению, содержащий слой резины, образующий внутреннюю поверхность захвата, в котором выполнены отверстия, заполненные угольным порошком, причем обе поверхности слоя резины снабжены токопроводящими пластинами. Поверхность захвата фиксирует момент соприкосновения захвата с предметом и вырабатывает сигналы, пропорциональные величине и площади прикладываемого,давления 3.
Однако применение резины, не обладающей достаточной эластичностью, не обеспечивает необходимой чувствительности поверхности захвата при приложении нагрузки между отверстиями, особенно при фиксации момента соприкосновения поверхности захвата с предметом. Кроме того, при зажатии захвата с предметом внутри резина в местах контактирования с ним сминается полностью, в связи с чем чувствительность сенсора теряется полностью, что не позволяет измерять усилие, прикладываемое к предмету со стороны захвата.
Целью изобретения является повышение чувствительности.
Указанная цель достигается тем, что в тактильном сенсоре промышленного робота, содержащем листовой упругий элемент с токопроводящими пластинами и отверстиями в которых размещены тензорезистивные датчики, упругий элемент снабжен замкнутыми полостями, заполненными жидкостью, контактирующими через стенки с датчиками, .разделенными пустотелыми замкнутыми перегородками, заполненными той же жидкостью и контактирующими с датчиками торцами, причем толщина стенок полостей и торцов перегородок, контактирующих с датчиками, выбрана из условия равенства Их жесткости по отношению к передаваемому давлению.
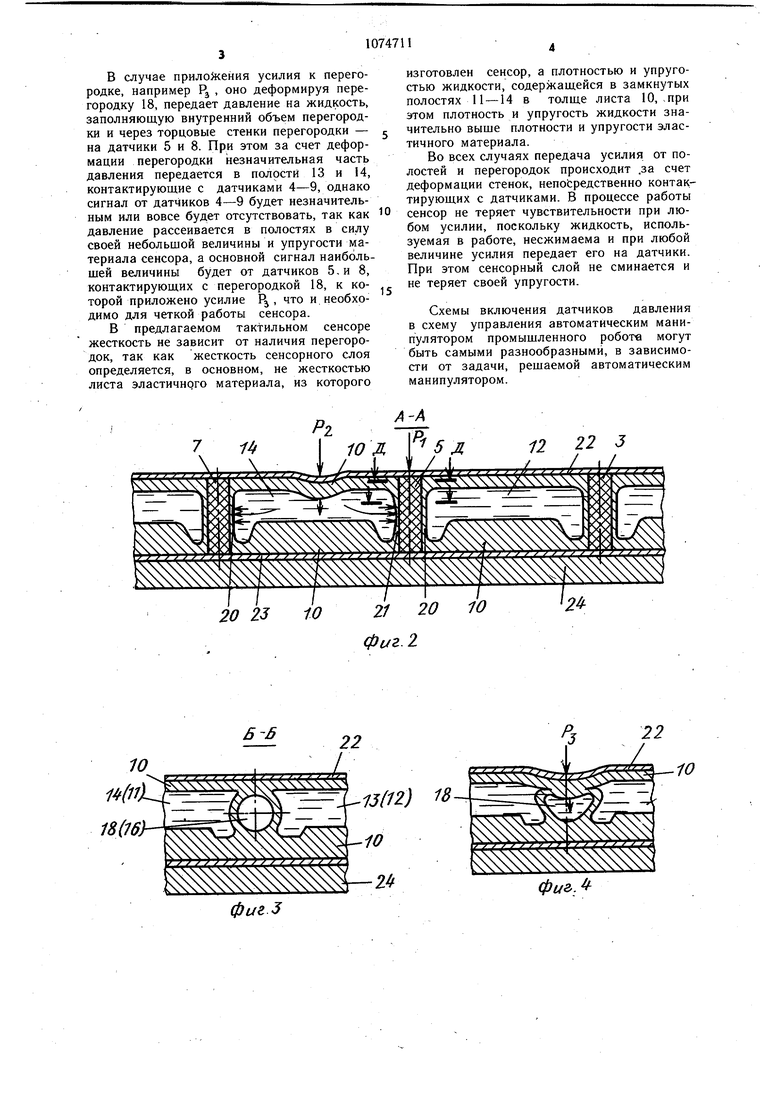
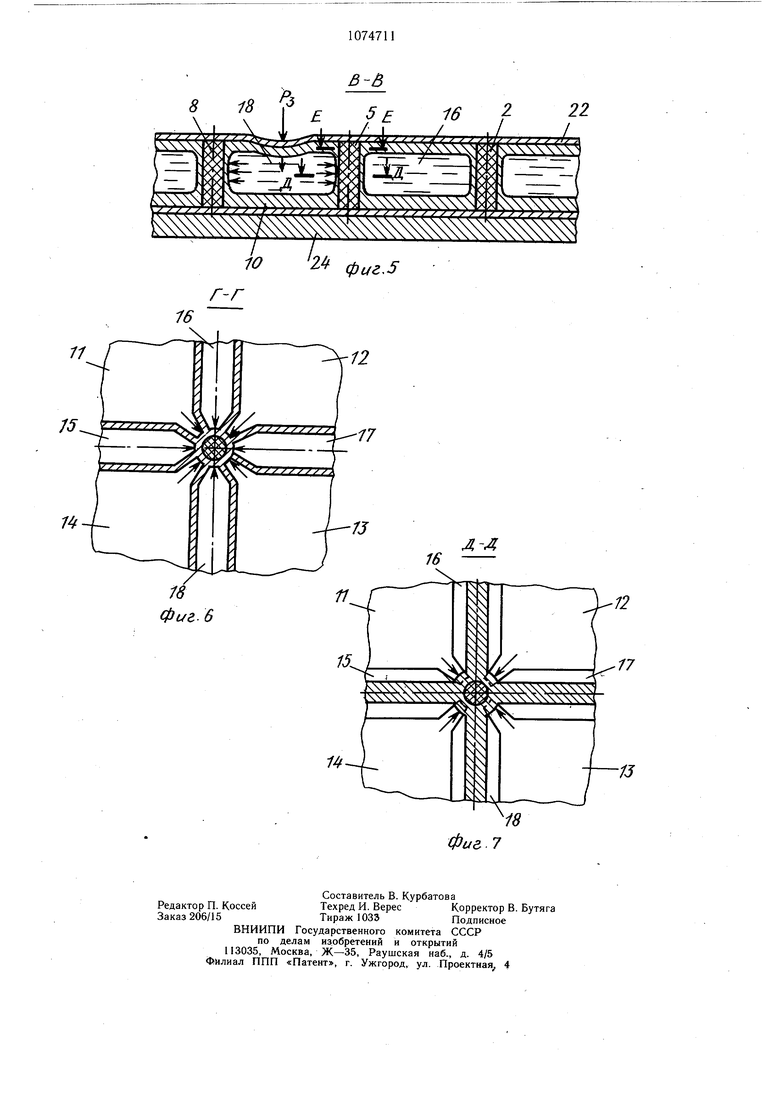
На фиг. 1 изображена поверхность тактильного сенсора, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б а фиг. 1; на фиг. 4 - то же, при действии нагрузки Р ; фиг. 5 - сечение В-В на фиг. 1; на фиг. 6 -.сечение Г-Г на фиг. 2 и 5; на фиг. 7 - сечение Д-Д на фиг. 2 и 5.
Тактильный сенсор состоит из тензорезистивных (силоизмерительных) датчиков 1-9, закрепленных в отверстиях листа 10 из эластичного материала, например реЗИНЫ. В толще листа 10 содержатся замкнутые полости (минирезервуары) 11 -14, заполненные жидкостью, например трансформаторным MacjjOM. Между собой полости 11 - 14 разделены перегородками 15-19 кольцевого сечения и содержат замкнутые полости, заполненные той же жидкостью. Стенки перегородок и лист 10 конструктивно представляют собой одно целое. Торцы перегородок 15-19 контактируют с дат чиками 1-9, так, например, полости пере5 городок 16 и 18 контактируют с датчиками 2, 5 и 8 (фиг. 5). Полости 11 -14 также контактируют с датчиками. Так, например, на фиг. 2 показано контактирование полостей 12 и 14 с датчиками 3, 5 и 7, а на фиг. 6 и фиг. 7 - контактирование поло0 стей 11 -14 с датчиком 5.
Во всех случаях полости контактируют с датчиками через тонкий слой материала листа 10, например полости 12 и 14 контактируют с датчиками 5 и 7 через тонкие стенки 20 и 21 (фиг. 2). Наружная поверхность листа 10 покрыта гибким токопроводящим материалом в виде пластины 22, приклеенной к листу 10, например из бериллиево-бронзовой фольги, имеющей прочный электрический контакт с датчиками I-9.
Q От противоположной стороны датчиков выполняются отдельные выводы с каждого датчика с помощью проводников, подключаемых в измерительное устройство системы управления робота, что дает возможность замерять усилие на каждом отдельном
участке сенсора (не показаны).
В том случае, когда необходимо замерять общее усилие, пропорциональное площади, прикладываемой к сенсору нагрузки, на противоположной стороне листа 10 также устанавливается токопроводящая пластина 23, аналогичная пластине 22, из того же материала. Пластина 22 снаружи покрывается тонким слоем диэлектрического покрытия, например лаком.
При работе сенсор устанавливается на
очувствляемой поверхности 24. При приложении усилия, например Р к датчику 5 поверхность пластины 22 н этом месте деформируется и передает усилие на датчик 5. Электрическое сопротивление датчика, пропорциональное величине усилия Р по0 дается в измерительное устройство системы управления робота.
При приложении усилия между датчиками 1-9, например Р к полости 14, оно передается жидкости, заполняющей полость 14, которая мгновенно передает
5 давление на датчики 4, 5, 7 и 8 через стенки 20 и 21. Сигналы этих датчиков, пропорциональные усилию Р , обозначают место проложения и интенсивность усилия Pj. В случае приложения усилия к перегородке, например Р , оно деформируя перегородку 18, передает давление на жидкость, заполняющую внутренний объем перегородки и через торцовые стенки перегородки - на датчики 5 и 8. При этом за счет деформации перегородки незначительная часть давления передается в полости 13 и 14, контактирующие с датчиками 4-9, однако сигнал от датчиков 4-9 будет незначительным или вовсе будет отсутствовать, так как давление рассеивается в полостях в силу своей небольшой величины и упругости материала сенсора, а основной сигнал наибольшей величины будет от датчиков 5. и 8, контактирующих с перегородкой 18, к которой приложено усилие Pj , что и необходимо для четкой работы сенсора. В предлагаемом тактильном сенсоре жесткость не зависит от наличия перегородок, так как жесткость сенсорного слоя определяется, в основном, не жесткостью листа эластичного материала, из которого 20 23 изготовлен сенсор, а плотностью и упругостью жидкости, содержащейся в замкнутых полостях 11 -14 в толще листа 10, ,при этом плотность и упругость жидкости значительно выше плотности и упругости эластичного материала. Во всех случаях передача усилия от полостей и перегородок происходит .за счет деформации стенок, непосредственно контактирующих с датчиками. В процессе работы сенсор не теряет чувствительности при любом усилии, поскольку жидкость, используемая в работе, несжимаема и при любой величине усилия передает его на датчики. При этом сенсорный слой не сминается и не теряет своей упругости. Схемы включения датчиков давления в схему управления автоматическим манипулятором промышленного робота могут быть самыми разнообразными, в зависимости от задачи, решаемой автоматическим манипулятором. 22 J / , / Ч ХучЧУчу 21 20 10 Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Тактильный сенсор промышленного робота | 1986 |
|
SU1371902A2 |
| Матричный тактильный датчик | 1986 |
|
SU1388282A1 |
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ВОСПРОИЗВЕДЕНИЯ ТАКТИЛЬНОГО ИЗОБРАЖЕНИЯ СОСТОЯНИЯ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2009 |
|
RU2425620C2 |
| Тактильный сенсор робота | 1987 |
|
SU1491699A1 |
| Тактильный сенсор промышленного робота | 1987 |
|
SU1463480A1 |
| УСТРОЙСТВО ДЛЯ ТАКТИЛЬНОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2011 |
|
RU2479245C2 |
| УСТРОЙСТВО ИССЛЕДОВАНИЯ ПЛОТНОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ | 2009 |
|
RU2440016C2 |
| ЕМКОСТНЫЙ ДАТЧИК ДАВЛЕНИЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 1991 |
|
RU2010199C1 |
ТАКТИЛЬНЫЙ СЕНСОР ПРО- МЫШЛЕННОГО РОБОТА, содержащий листовой упругий элемент с токопроводящими пластинами и отверстиями, в которых размещены тензорезистивные датчики, отличающийся тем, что, с целью повышения чувствительности, упругий элемент снабжен замкнутыми полостями, заполненными жидкостью, контактирующими через стенки с датчиками, разделенными пустотелыми, замкнутыми перегородками, заполненными той же жидкостью и контактирующими с датчиками торцами, причем толщина стенок . полостей и торцов перегородок, контактирующих с датчиками, выбрана из условия равенства их жесткости по отношению к передаваемому давлению. сл 4 VI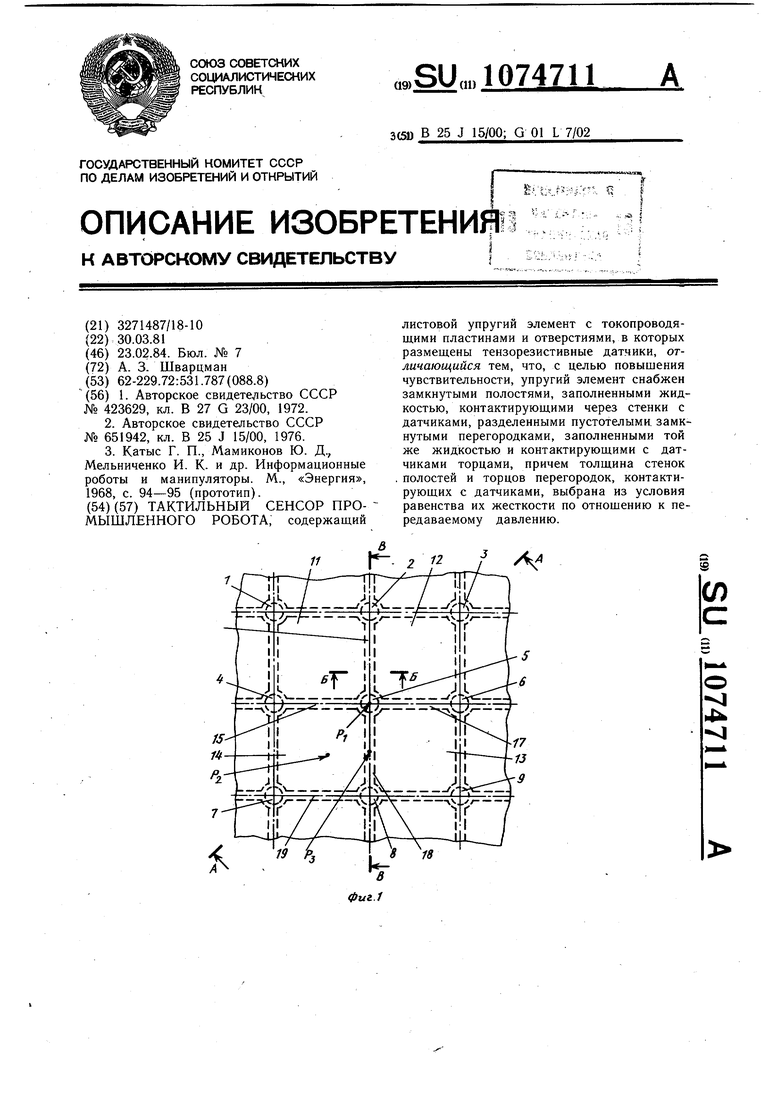
фиг 5 фи&Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| П., Мамиконов Ю | |||
| Д., Мельниченко И | |||
| К | |||
| и др | |||
| Информационные роботы и манипуляторы | |||
| М., «Энергия, 1968, с | |||
| Экономайзер | 0 |
|
SU94A1 |
