1138
Изобретение относится к весоизмерительной технике.
Цель изобретения - повьшение точности за счет уменьшения влияния аэростатической силы.
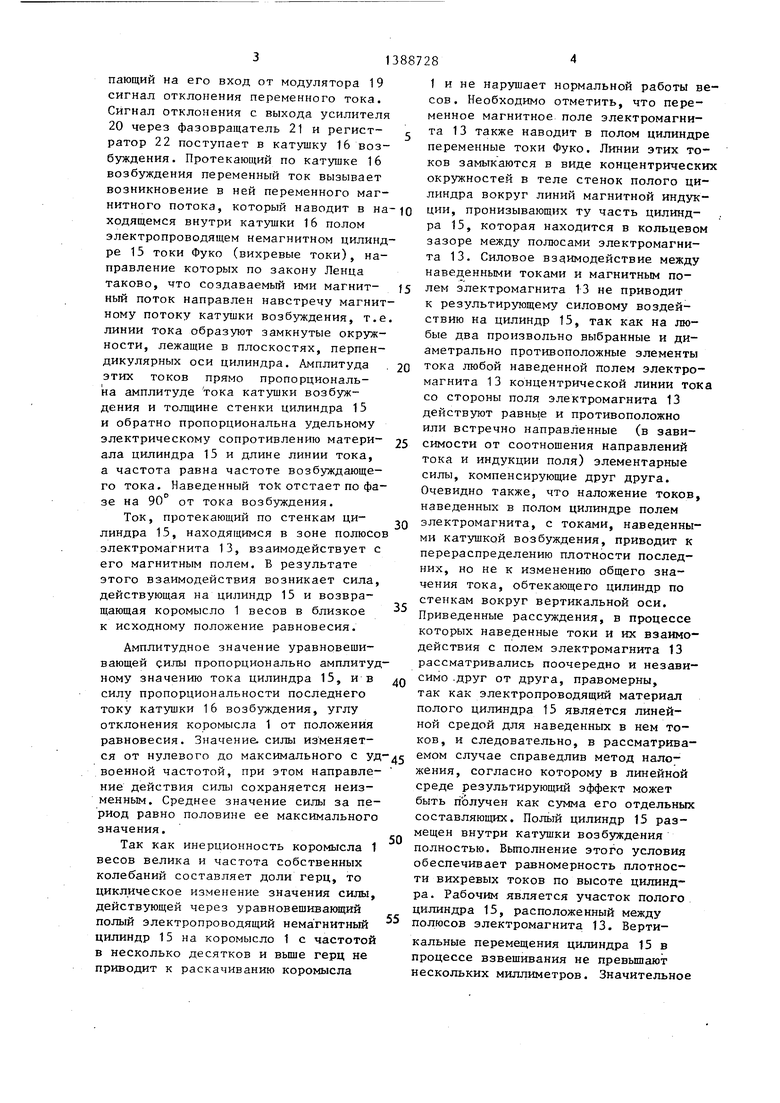
На фиг. 1 изображена схема весов с электромагнитным уравновешиванием; на фиг. 2 - электромагнитный компенсатор весов, изометрическая проекция.
В автоматических весах с электромагнитным уравновешиванием коромысло 1 при помощи опорной призмы 2 установлено на подушке 3. К одному из плеч коромысла 1 подвешен подвижный элемент 4 преобразователя 5 отклонения и грузоприемная чашка 6, на которой размещается взвешиваемый груз 7. Преобразователь 5 отклонения состоит из генераторной катушки 8 с ферромагнитным сердечником 9, двух идентичных приемных катушек 10 и 11, расположенных соосно генераторной катушке 8 на одинаковом расстоянии от ее центра и под- вижного элемента 4, выполненного из немагнитного проводящего материала в виде полого цилиндра. Электромагнитный компенсатор 12 выполнен в виде неподвижно закрепленного на основании весов электромагнита 13 переменного тока с обмоткой (катушкой) 14, неподвижно закрепленной в кольцевом зазоре между полюсов электромагнита 13, подвижного полого цилиндра 15, идентичного по форме, размерам и материалу подвижному элементу 4 трансформаторного преобразователя 5 отклонения. Подвижный полый цилиндр 15 свободно подвешен к коромыслу 1 весов так, что он расположен внутри катушки 16 возбуждения (дополнительная катушка), при этом его нижняя часть находится в кольцевом зазоре между полюсов электромагнита 13. Основания катушки 16 возбуждения и подвижного полого цилиндра 15 расположены на уровне нижнего края полюсов электромагнита 13 перемен ного тока. Генераторная катушка 8 подключена к генератору 17 высокой частоты..Приемные катушки 10 и 11 подключены к блоку 18 преобразования сигнала отклонения, выход которого через модулятор 19 подключен к усилителю 20. Выход усилителя 20 через фазовращатель 21 и регистратор 22 соединен с катушкой
0
0
5
0
возбуждения электромагнитного компенсатора 12. Выход генератора 23. низкой частоты соединен с управляющим входом модулятора 19 и входом усилителя 24 мощности. К выходу усилифеля 24 мощности подключена обмотка 14 электромагнита 13 переменного тока.
Автоматические весы с электромагнитным уравновешиванием работают следующим образом.
После включения весов сигнал низкой частоты с выхода генератора 23 низкой частоты подается на усилитель 5 24 мощности, усиливается им и поступает в обмотку 14 электромагнита 13 переменного тока. В кольцевом зазоре между полюсов электромагнита 13 возникает переменное магнитное поле, амплитуда индукции которого пропорциональна амплитуде переменного тока в обмотке 14, а частота равна частоте сигнала низкой частоты на выходе генератора 23.
При наложении груза 7 на чашку 6 весов коромысло 1 отклоняется от положения равновесия, что приводит к возникновению на выходе преобразователя 5 отклонения сигнала переменного тока. Уровень этого сигнала пропорционален углу отклонения коромысла 1 от положения равновесия, а его полярность зависит от .направления перемещения (вниз йпи вверх) плеча коромысла 1, связанного с подвижным элементом 4. Указанный сигнал переменного тока поступает на вход блока 18, где выпрямляется и сравнивается, и затем поступает на модулятор 19. Модулятор 19 преобразует сигнал отклонения постоянного тока в сигнал отклонения переменного тока, амплитуда которого пропорциональна уровню сигнала отклонения постоянного тока, частота равна частоте низкочастотного сигнала, поступающего на управляющий вход модулятора 19с выхода генератора 18 низкой частоты, а фаза определяется направлением перемещения (вниз или вверх) плеча коромысла 1. Последовательное преобразование переменного тока высокой частоты в постоянный ток, а затем в переменный ток низкой частоты производится в связи с тем, что работа пре- образователя 5 отклонения эффективна на высоких частотах,а работа компенсатора - на более низких частотах. Усилитель 20 усиливает посту5
0
5
0
5
пающий на его вход от модулятора 19 сигнал отклонения переменного тока. Сигнал отклонения с выхода усилителя 20 через фазовращатель 21 и регистратор 22 поступает в катушку 16 возбуждения. Протекающий по катушке 16 возбуждения переменный ток вызывает возникновение в ней переменного магнитного потока, который наводит в находящемся внутри катушки 16 полом электропроводящем немагнитном цилиндре 15 токи Фуко (вихревые токи), направление которых по закону Ленца таково, что создаваемый ими магнитный поток направлен навстречу магнитному потоку катушки возбуждения, т.е линии тока образуют замкнутые окружности, лежащие в плоскостях, перпендикулярных оси цилиндра. Амплитуда этих токов прямо пропорциональна амплитуде тока катушки возбуждения и толщине стенки цилиндра 15 и обратно пропорциональна удельному электрическому сопротивлению материала цилиндра 15 и длине линии тока, а частота равна частоте возбуждающего тока. Наведенный тоК отстает по фазе на 90 от тока возбуждения.
Ток, протекающий по стенкам цилиндра 15, находящимся в зоне полюсо электромагнита 13, взаимодействует с его магнитным полем. В результате этого взаимодействия возникает сила, действующая на цилиндр 15 и возвращающая коромысло 1 весов в близкое к исходному положение равновесия.
Амплитудное значение уравновешивающей силы пропорционально амплитудному значению тока цилиндра 15, ив силу пропорциональности последнего току катушки 16 возбуждения, углу отклонения коромысла 1 от положения равновесия. Значение силы изменяется от нулевого до максимального с удвоенной частотой, при этом направление действия силы сохраняется неизменным. Среднее значение силы за период равно половине ее максимального значения.
Так как инерционность коромысла 1 весов велика и частота собственных колебаний составляет доли герц, то циклическое изменение значения силы, действующей через уравновешивающий полый электропроводящий немагнитный цилиндр 15 на коромысло 1 с частотой в несколько десятков и выше герц не приводит к раскачиванию коромысла
0
5
0
5
0
5
0
5
0
5
1 и не нарушает нормальной работы весов. Необходимо отметить, что переменное магнитное поле электромагнита 13 также наводит в полом цилиндре переменные токи Фуко. Линии этих токов замыкаются в виде концентрических окружностей в теле стенок полого цилиндра вокруг линий магнитной индукции, пронизывающих ту часть цилиндра 15, которая находится в кольцевом зазоре между полюсами электромагнита 13. Силовое взаимодействие между наведенными токами и магнитным полем электромагнита 13 не приводит к результирующему силовому воздействию на цилиндр 15, так как на любые два произвольно выбранные и диаметрально противоположные элементы тока любой наведенной полем электромагнита 13 концентрической линии тока со стороны поля электромагнита 13 действуют равные и противоположно или встречно направленные (в зависимости от соотношения направлений тока и индукции поля) элементарные силы, компенсирующие друг друга. Очевидно также, что наложение токов, наведенных в полом цилиндре полем электромагнита, с токами, наведенными катушкой возбуждения, приводит к перераспределению плотности последних, но не к изменению общего значения тока, обтекающего цилиндр по стенкам вокруг вертикальной оси. Приведенные рассуждения, в процессе которых наведенные токи и их взаимодействия с полем электромагнита 13 рассматривались поочередно и независимо .друг от друга, правомерны, так как электропроводящий материал полого цилиндра 15 является линейной средой для наведенных в нем токов, и следовательно, в рассматриваемом случае справедлив метод наложения, согласно которому в линейной среде результирующий эффект может быть получен как сумма его отдельных составляющих. Полый цилиндр 15 размещен внутри катушки возбуждения полностью. Вьтолнение этого условия обеспечивает равномерность плотности вихревых токов по высоте цилиндра. Рабочим является участок полого цилиндра 15, расположенный между полюсов электромагнита 13. Вертикальные перемещения цилиндра 15 в процессе взвешивания не превьш1ают нескольких миллиметров. Значительное
смещение цилиндра 15 внутрь магнито- провода (ниже уровня нижнего края полюсов) нежелательно, так как магнитные поля рассеивания, существующие в области пространства внутри магнитопровода, могут оказать воздействие на точность работы компенсатора 12. Полярность подключения , обмотки 14 электромагнита 13 к уси- лителю 24 мощности выбирается такой, чтобы сила, действующая на рабочую часть уравновешивающего цилиндра 15, стремилась возвратить коромысло 1 к положению равновесия. Фазовра- щатель 21 позволяет исключить фазовы сдвиг между током в уравновешивающем цилиндре 15 и магнитной индукции между полюсов электромагнита 1 3, возникающей вследствие различных полных сопротивлений цилиндра 15 и обмотки 14, Исключение фазового сдвига обеспечивает получение максимального уравновешивающего усилия при выбранных параметрах электромагнитного компенсатора 12. О значении массы взвешиваемого груза судят по показаниям регистратора 22, которые пропорциональны амплитудному (дейст- вунмдему) значению тока, протекающего по обмотке 10 возбуждения. Формула изобретения
Автоматические весы с электромагнитным уравновешиванием, содержащие коромысло, трансформаторный преобразователь отклонения, подвижный элемент которого в виде полого цилинде 0 5 п
5
ра из немагнитного проводящего материала подвешен к одному плечу коромысла, генераторная катушка подключена к генератору высокой частоты, а приемные катзшки - к входу блока преобразования, усилитель, регистратор и электромагнитный компенсатор, подвижный элемент которого подвешен к другому плечу коромысла, а катушка расположена в кольцевом зазоре сердечника, отличающиеся тем, что, с целью повьш1ения точности за счет уменьшения влияния аэростатической Силы, в них введены генератор низкой частоты, модулятор, фазовращатель и усилитель мощности, а в компенсатор введена дополнительная катушка, которая закреплена своей нижней частью в колыт.евом зазоре между полюсами сердечника, подвижный элемент компенсатора выполнен идентичным -подвижному элементу преобразователя отклонений и расположе-н внутри дополнительной катушки, причем торцы дополнительной катушки и подвижного элемента компенсатора расположены на уровне нижнего края полюсов сердечника, дополнительная катушка через регистратор, фазовращатель и усилитель подключена к выходу модулятора, информационньй вход которого соединен с выходом блока преобразования, управляющий - с выходом генератора низкой частоты, а катушка компенсатора подключена к генератору низкой частоты через усилитель мош ности.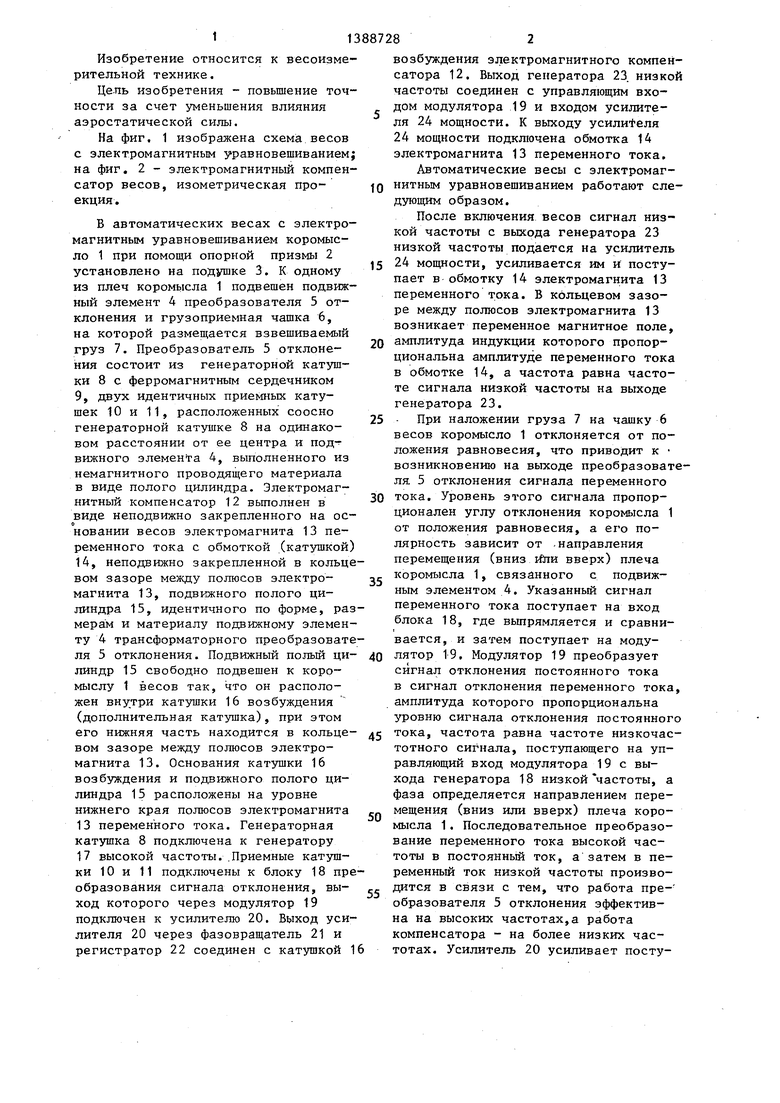
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические весы с электромагнитным уравновешиванием | 1985 |
|
SU1303837A1 |
| Весы с электромагнитным уравновешиванием | 1988 |
|
SU1515065A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1987 |
|
SU1446483A1 |
| Устройство для измерения магнитной восприимчивости слабомагнитных материалов | 1985 |
|
SU1285418A1 |
| Трансформаторный датчик отклонения для весов с электромагнитным уравновешиванием | 1982 |
|
SU1040342A1 |
| Автоматизированный измеритель момента спиральных пружин | 2017 |
|
RU2676220C1 |
| Компенсационный ротационный вискозиметр | 1977 |
|
SU702269A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610931C1 |
| Вибрационный магнитометр | 1979 |
|
SU783732A1 |
| Магнитометр | 1988 |
|
SU1580298A1 |

Изобретение относится к весоизмерительной технике. Цель изобретения - повьшение точности за счет уменьшения влияния аэростатической силы. Фазовращатель 21 позволяет исключить фазовый сдвиг между током в уравновешивающем цилиндре 15 и током, наводимым маги, индукцией между полюсами электромагнита 13, возникающей вследствие различных полных сопротивлений цилиндра 15 и обмотки 14. Исключение фазового сдвига обеспечивает получение максимального уравновешивающего усилия при выбранных параметрах электромагнитного компенсатора 12. О значении массы взвешиваемого груза судят по показаниям регистратора 22, которые пропорциональны амплитудному значению тока, протекающего по обмотке 10 возбуждения. 2 ил. / / (Л I 00 00 00
Iff и г Z
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1068723A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Трансформаторный датчик отклонения для весов с электромагнитным уравновешиванием | 1982 |
|
SU1040342A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
