Изобретение относится к области измерительной техники и может быть использована для автоматизированного определения величины момента, создаваемого плоской спиральной пружиной или торсионом с неограниченным углом закрутки, плоской пружиной, работающей на изгиб или кручение, селективного подбора близких по характеристикам пружин с заданной точностью, контроля качества этапов технологического процесса их изготовления.
Устройство для измерения момента спиральных пружин согласно а.с. СССР №777504, G01L 3/10, опубл. 07.11.1980 г., бюллетень №41 содержит подвижную часть, установленную в корпусе с помощью растяжек, датчик углового положения подвижной части, усилитель, моментный датчик в виде постоянного магнита, закрепленного на подвижной части, и неподвижных катушек и компенсатор жесткости растяжек.
Полуавтомат для проверки крутящих моментов спиральных пружин согласно а. с. СССР №433367, G01L 3/10, опубл. 25.06.1974 г., бюллетень №23 содержит гильзу, свободно посаженную на закручивающий шпиндель, несущий на себе поводок с собачкой, сцепляющейся с храповым колесом шпинделя, и двумя упорными кулачками, определяющими поочередно величину углового спуска проверяемой пружины, механически взаимодействующими с жесткими откидными упорами, два электромагнитных датчика, два грузовых рычага.
Стенд контроля выходных характеристик спиральных пружин согласно а.с. СССР №1732196, G01L 3/10, опубл. 07.05.1992 г., бюллетень №17 содержит датчик угла, счетчик импульсов, блок управления, привод, компаратор, интегратор, аналого-запоминающий блок, блок управления током, аналого-цифровой преобразователь, дешифратор, мультиплексор, блок запуска, блок задержки, привод, источник света, фотоприемник, диск с отверстием датчик угла, опоры, электромагнитную рамку, входной вал, выходной вал, регистратор.
Автоматизированный стенд контроля выходных характеристик спиральных пружин согласно патенту на изобретение №2526553, МПК G01L 3/10, опубл. 27.08.2014 г., бюл. №24, который содержит выходной вал стенда, соединенный с зажимом внутреннего конца испытуемой пружины, зажим наружного конца испытуемой пружины, связанный с входным валом стенда, соединенным через редуктор с электродвигателем, оптическую систему, электромеханическую систему уравновешивания коромыслом с помощью электромагнитов и регистратор.
К недостаткам этих устройств следует отнести наличие погрешностей механизмов задания и отсчета моментов закручивания пружин за счет трения между подвижными элементами конструкции.
Наиболее близким по технической сущности к заявленному техническому решению, взятым за прототип, является автоматизированный измеритель момента спиральных пружин согласно патенту на изобретение №2623816, МПК G01L 3/10, опубл. 29.06.2017 г., бюлл. №19, который содержит электронный блок измерения, первая выходная шина которого подсоединена к входной шине регистратора, выходная шина которого соединена с входной шиной электронного блока измерения, вторая выходная шина которого подключена к входной шине модуля управления шаговым двигателем, выходная шина которого соединена с входной шиной шагового двигателя, механический выход которого соединен с механическим входом модуля закрепления испытуемой пружины, механические выходы которого связаны и закреплены к плечам коромысла симметрично и соосно выходному валу, установленному на опорах выходного вала в горизонтальной плоскости, и на котором закреплена фиксируемая втулка, соединенная ортогонально с осью балансировочного груза, на которой установлен подвижный балансировочный груз, а в центре симметрии коромысла закреплено зеркало оптической системы, включающей также точечный источник света, вход которого подключен к первому выходу электронного блока измерения, и фотоприемник, подключенный к его первому входу, второй выход электронного блока измерения подключен к входу регистратора, выход которого подключен ко второму входу электронного блока измерения, упоры плеч коромысла, которые имеют возможность касания к коромыслу, магнитоэлектрические преобразователи, установленные симметрично и перевернуто ортогонально на концах плеч коромысла, каждый из которых содержит катушку и установленный соосно постоянный магнит, при этом обмотки катушек подсоединены последовательно к третьему и четвертому выходу электронного блока измерения, а магнитные полюса каждого из постоянных магнитов и катушек ориентированы друг относительно друга таким образом, что взаимодействия магнитных полей создают моменты, направленные на уравновешивание момента коромысла, создаваемого испытуемой пружиной, а выходной вал с опорами выходного вала закреплены на платформе, на которой установлены также уровень в горизонтальной плоскости платформы, шаговый двигатель, модуль закрепления исследуемой пружины, ортогонально упоры плеч коромысла, при этом платформа установлена на регулируемых по высоте опорах гашения вибраций, источник механических вибраций, вход которого подключен к выходу блока управления параметрами вибраций.
К недостаткам прототипа следует отнести воздействие вибрационных колебаний на механические связи элементов конструкции (шаговый двигатель, модуль закрепления пружины, коромысло, опоры выходного вала и т.д), что вызывает изменения их параметров связей и, следовательно, уменьшается точность измерения момента.
Технический результат, на достижение которого направлено изобретение, заключается в увеличении точности измерения момента за счет уменьшения влияния вибрационных колебаний на конструктивные элементы и механические связи элементов конструкции (шаговый двигатель, модуль закрепления пружины, коромысло, опоры выходного вала и т.д), что вызывает изменения параметров связей.
Технический результат достигается тем, что в автоматизированном измерителе момента спиральных пружин, содержащий электронный блок измерения, первая выходная шина которого подключена к входной шине регистратора, выходная шина которого соединена с входной шиной электронного блока измерения, вторая выходная шина которого подключена к входной шине модуля управления шаговым двигателем, выходная шина которого соединена с входной шиной шагового двигателя, механический выход которого соединен с механическим входом модуля закрепления испытуемой пружины, механические выходы которого связаны и закреплены к плечам коромысла симметрично и соосно выходному валу, установленному на опорах выходного вала в горизонтальной плоскости, и на котором закреплена фиксируемая втулка, соединенная ортогонально с осью балансировочного груза, на которой установлен подвижный балансировочный груз, а в центре симметрии коромысла закреплено зеркало оптической системы, включающей также точечный источник света, вход которого подключен к первому выходу электронного блока измерения, и фотоприемник, подключенный к его первому входу, второй выход электронного блока измерения подключен к входу регистратора, выход которого подключен ко второму входу электронного блока измерения, упоры плеч коромысла, которые имеют возможность касания к коромыслу, магнитоэлектрические преобразователи, установленные симметрично и перевернуто ортогонально на плечах коромысла, каждый из которых содержит катушку и установленный соосно постоянный магнит, при этом обмотки катушек подсоединены последовательно к третьему и четвертому выходу электронного блока измерения, а магнитные полюса каждого из постоянных магнитов и катушек ориентированы друг относительно друга таким образом, что взаимодействия магнитных полей создают моменты, направленные на уравновешивание момента коромысла, создаваемого испытуемой пружиной, а выходной вал с опорами выходного вала закреплены на платформе, на которой установлены уровень в горизонтальной плоскости платформы, шаговый двигатель, модуль закрепления исследуемой пружины, ортогонально упоры плеч коромысла новым является то, что в него введены постоянный магнит возврата диска, электромагнит, кронштейн и диск, закрепленный соосно на выходном вале, по обе стороны которого установлены с зазором постоянный магнит возврата диска и электромагнит, закрепленные на кронштейне, установленном на платформе, при этом вход электромагнита подключен к выходу блока управления параметрами переменного магнитного поля, причем полюса магнитных полей постоянного магнита возврата диска и электромагнита ориентированы соосно и направлены перпендикулярно к плоскостям диска.
В автоматизированном измерителе момента спиральных пружин диск изготовлен из магнитно мягкого материала.
В автоматизированном измерителе момента спиральных пружин кронштейн выполнен из немагнитного материала.
В автоматизированном измерителе момента спиральных пружин в качестве блока управления параметрами переменного магнитного поля используется звуковой генератор.
В автоматизированном измерителе момента спиральных пружин постоянный магнит возврата диска изготовлен из самарий кобальтового сплава.
Сущность изобретения поясняется на фиг. 1, где приведена структурно-функциональная схема автоматизированного измерителя выходных момента спиральных пружин.
Здесь:
1 - электронный блок измерения;
2 - модуль управления шаговым двигателем;
3 - шаговый двигатель;
4 - модуль закрепления испытуемой пружины;
5 - коромысло;
6 - упор плеча коромысла;
7 - катушка;
8 - постоянный магнит;
9 - точечный источник света;
10 - ось балансировочного груза;
11 - подвижный балансировочный груз;
12 - зеркало оптической системы;
13 - фиксируемая втулка;
14 -выходной вал;
15 - фотоприемник;
16 - опора выходного вала;
17 - платформа;
18 - кронштейн;
19 - диск;
20 - электромагнит;
21 - постоянный магнит возврата диска;
22 - блок управления параметрами переменного магнитного поля;
23 - регистратор;
24 - уровень;
Автоматизированный измеритель момента спиральных пружин, содержит электронный блок 1 измерения, первая выходная шина которого подключена к входной шине регистратора 23, выходная шина которого соединена с входной шиной электронного блока 1 измерения, вторая выходная шина которого подключена к входной шине модуля 2 управления шаговым двигателем, выходная шина которого соединена с входной шиной шагового двигателя 3, механический выход которого соединен с механическим входом модуля 4 закрепления испытуемой пружины, механические выходы которого связаны и закреплены к плечам коромысла 5 симметрично и соосно выходному валу 14, установленному на опорах 16 выходного вала в горизонтальной плоскости, и на котором закреплена фиксируемая втулка 13, соединенная ортогонально с осью 10 балансировочного груза, на которой установлен подвижный балансировочный груз 11, а в центре симметрии коромысла 5 закреплено зеркало 12 оптической системы, включающей также точечный источник 9 света, вход которого подключен к первому выходу электронного блока 1 измерения, и фотоприемник 15, подключенный к его первому входу, второй выход электронного блока измерения 1 подключен к входу регистратора 23, выход которого подключен ко второму входу электронного блока 1 измерения, упоры плеч коромысла 6, которые имеют возможность касания к коромыслу 5, магнитоэлектрические преобразователи, установленные симметрично и перевернуто ортогонально на плечах коромысла 5, каждый из которых содержит катушку 7 и установленный соосно постоянный магнит 8, при этом обмотки катушек подсоединены последовательно к третьему и четвертому выходу электронного блока 1 измерения, а магнитные полюса каждого из постоянных магнитов и катушек ориентированы друг относительно друга таким образом, что взаимодействия магнитных полей создают моменты, направленные на уравновешивание момента коромысла 5, создаваемого испытуемой пружиной, а выходной вал 14 с опорами 16 выходного вала закреплены на платформе 17, на которой установлены уровень 24 в горизонтальной плоскости платформы 17, шаговый двигатель 3, модуль закрепления исследуемой пружины 4, ортогонально упоры плеч коромысла 6, постоянный магнит 21 возврата диска, электромагнит 20, кронштейн 18 и диск 19, закрепленный соосно на выходном вале 14, по обе стороны которого установлены с зазором постоянный магнит 21 возврата диска и электромагнит 20, закрепленные на кронштейне 18, установленном на платформе 17, при этом вход электромагнита 20 подключен к выходу блока 22 управления параметрами переменного магнитного поля, причем полюса магнитных полей постоянного магнита 21 возврата диска и электромагнита 20 ориентированы соосно и направлены перпендикулярно к плоскостям диска.
В автоматизированном измерителе момента спиральных пружин диск 19 изготовлен из магнитно мягкого материала.
В автоматизированном измерителе момента спиральных пружин кронштейн 18 выполнен из немагнитного материала.
В автоматизированном измерителе момента спиральных пружин в качестве блока 22 управления параметрами переменного магнитного поля используют звуковой генератор.
В автоматизированном измерителе момента спиральных пружин постоянный магнит 21 возврата диска изготовлен из самарий кобальтового сплава.
Измеритель выходных характеристик спиральных пружин работает следующим образом. Перед включением процесса измерения производится регулировка горизонтальности платформы 17 и коромысла 5 по уровню 24, после этого осуществляется регулировка параметров вибрации путем установки параметров частоты и ускорения вибрационных колебаний диска 19 в блоке 22 управления параметрами переменного магнитного поля, при этом электромагнит 20 создает переменное магнитное поле, которое притягивает диск 19 к опоре 16 выходного вала, с силой, превосходящей силу притяжения постоянного магнита 21 возврата диска и создаются вибрационные микроколебания диска 19 совместно с выходным валом 14 между опорами 16 выходного вала, и этим уменьшаются трение в опорах 16 выходного вала с выходным валом 14 и увеличивается точность измерения.
Далее производится балансировка коромысла 5 путем поворота оси 10 балансировочного груза вокруг выходного вала 14 и передвижением подвижного балансировочного груза 11 вдоль оси 10, ориентируясь на срабатывание индикации в электронном блоке 1 измерения по его индикации об уравновешивании коромысла 5 при засветке точечным источником 9 света оптического приемника 15.
Потом устанавливается испытуемая пружина в модуль 4 закрепления пружины. После этого в регистратор 23 вводится номер испытуемой пружины, диапазон измерения момента закручивания, количество контролируемых точек характеристики испытуемой пружины.
Затем по команде оператора запускается процесс контроля, при этом на выходе регистратора 23 появляется сигнал запуска измерения на втором входе электронного блока 1 измерения, а через его первую выходную шину по программе, заложенной в регистраторе 23, осуществляется процесс контроля характеристики пружины и управление движением шагового двигателя 3, который закручивает пружину на заданный программой угол по точкам до значения угла соответствующего диапазону измерения, а получаемый при этом момент закручивания передается от испытуемой пружины с выхода модуля 4 закрепления испытуемой пружины на коромысло 5, которое под его действием выходит из равновесия, а затем уравновешивается током от первого и третьего выходов электронного блока 1 измерения при помощи электромагнитов путем взаимодействия магнитных полей постоянных магнитов 8 и катушек 7, при этом ток через обмотку катушки пропорционален измеряемому моменту испытуемой пружины, при уравновешивании происходит засветка фотоприемника 15 через зеркало 12 оптической системы от точечного источника 9 света, питаемого от четвертого выхода электронного блока 1 измерения в каждой точке измерения, сигнал с выхода фотоприемника 15 подается на первый вход электронного блока 1 измерения и осуществляется регистрация результатов измерений в регистраторе 23 через его входную шину при появлении на втором входе электронного блока 1 измерения импульса конца измерения. После окончания съема характеристик испытуемой пружины производится процесс реверсирования шагового двигателя 3 в исходное положение для раскрутки испытуемой пружины и устанавливается следующая испытываемая пружина. По результатам выборки характеристик заданного количества испытуемых пружин в регистраторе 23 включается программа обработки и отбора близких по характеристикам испытуемых пружин с заданной точностью подбора.
Все блоки и модули в автоматизированном измерителе момента спиральных пружин реализуются на известных аналоговых и цифровых интегральных микросхемах и электромеханических элементах.
Таким образом, заявляемый автоматизированный измеритель момента спиральных пружин позволяет увеличить точность измерения путем уменьшения влияния вибрационных колебаний на конструктивные элементы (шаговый двигатель, модуль закрепления пружины, коромысло, опоры выходного вала и т.д), и их механические связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель выходных характеристик спиральных пружин | 2016 |
|
RU2623816C1 |
| АВТОМАТИЗИРОВАННЫЙ ИЗМЕРИТЕЛЬ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2014 |
|
RU2586411C1 |
| Автоматизированный измеритель выходных характеристик спиральных пружин | 2014 |
|
RU2608330C2 |
| АВТОМАТИЗИРОВАННЫЙ СТЕНД КОНТРОЛЯ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2012 |
|
RU2526553C2 |
| Автоматизированный стенд контроля круговых потенциометров | 2019 |
|
RU2725887C1 |
| Стенд для контроля выходных характеристик спиральных пружин | 1990 |
|
SU1732196A1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Устройство для проверки магнитных головок | 1980 |
|
SU892472A1 |

Изобретение относится к области измерительной техники и может быть использовано для автоматизированного определения величины момента, создаваемого плоской спиральной пружиной или торсионом с неограниченным углом закрутки. Сущность изобретения заключается в том, что автоматизированный измеритель момента спиральных пружин дополнительно содержит постоянный магнит возврата диска, электромагнит, кронштейн и диск, закрепленный соосно на выходном вале, по обе стороны которого установлены с зазором постоянный магнит возврата диска и электромагнит, закрепленные на кронштейне, установленном на платформе, при этом вход электромагнита подключен к выходу блока управления параметрами переменного магнитного поля, причем полюса магнитных полей постоянного магнита возврата диска и электромагнита ориентированы соосно и направлены перпендикулярно к плоскостям диска. Технический результат – повышение точности измерения момента спиральных пружин. 4 з.п. ф-лы, 1 ил.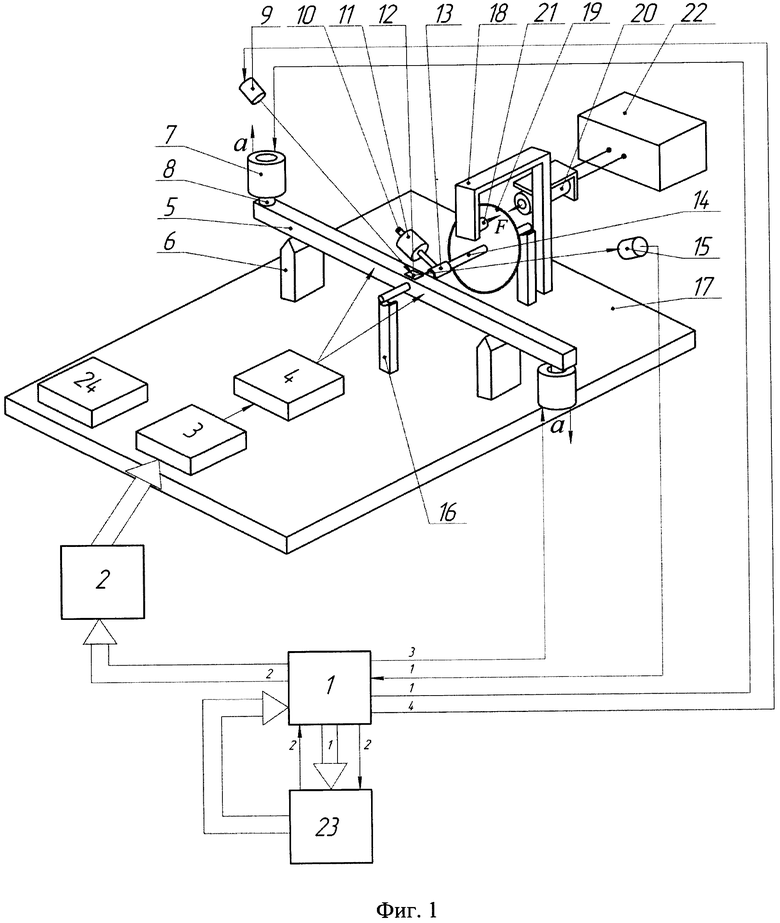
1. Автоматизированный измеритель момента спиральных пружин, содержащий электронный блок измерения, первая выходная шина которого подключена к входной шине регистратора, выходная шина которого соединена с входной шиной электронного блока измерения, вторая выходная шина которого подключена к входной шине модуля управления шаговым двигателем, выходная шина которого соединена с входной шиной шагового двигателя, механический выход которого соединен с механическим входом модуля закрепления испытуемой пружины, механические выходы которого связаны и закреплены к плечам коромысла симметрично и соосно выходному валу, установленному на опорах выходного вала в горизонтальной плоскости, и на котором закреплена фиксируемая втулка, соединенная ортогонально с осью балансировочного груза, на которой установлен подвижный балансировочный груз, а в центре симметрии коромысла закреплено зеркало оптической системы, включающей также точечный источник света, вход которого подключен к первому выходу электронного блока измерения, и фотоприемник, подключенный к его первому входу, второй выход электронного блока измерения подключен к входу регистратора, выход которого подключен ко второму входу электронного блока измерения, упоры плеч коромысла, которые имеют возможность касания к коромыслу, магнитоэлектрические преобразователи, установленные симметрично и перевернуто ортогонально на плечах коромысла, каждый из которых содержит катушку и установленный соосно постоянный магнит, при этом обмотки катушек подсоединены последовательно к третьему и четвертому выходам электронного блока измерения, а магнитные полюса каждого из постоянных магнитов и катушек ориентированы относительно друг друга таким образом, что взаимодействия магнитных полей создают моменты, направленные на уравновешивание момента коромысла, создаваемого испытуемой пружиной, а выходной вал с опорами выходного вала закреплены на платформе, на которой установлены уровень в горизонтальной плоскости платформы, шаговый двигатель, модуль закрепления исследуемой пружины, ортогонально упоры плеч коромысла, отличающийся тем, что в него введены постоянный магнит возврата диска, электромагнит, кронштейн и диск, закрепленный соосно на выходном валу, по обе стороны которого установлены с зазором постоянный магнит возврата диска и электромагнит, закрепленные на кронштейне, установленном на платформе, при этом вход электромагнита подключен к выходу блока управления параметрами переменного магнитного поля, причем полюса магнитных полей постоянного магнита возврата диска и электромагнита ориентированы соосно и направлены перпендикулярно к плоскостям диска.
2. Автоматизированный измеритель момента спиральных пружин по п. 1, отличающийся тем, что диск изготовлен из магнитно-мягкого материала.
3. Автоматизированный измеритель момента спиральных пружин по п. 1, отличающийся тем, что кронштейн выполнен из немагнитного материала.
4. Автоматизированный измеритель момента спиральных пружин по п. 1, отличающийся тем, что в качестве блока управления параметрами переменного магнитного поля используют звуковой генератор.
5. Автоматизированный измеритель момента спиральных пружин по п. 1, отличающийся тем, что постоянный магнит возврата диска изготовлен из самарий кобальтового сплава.
| Измеритель выходных характеристик спиральных пружин | 2016 |
|
RU2623816C1 |
| АВТОМАТИЗИРОВАННЫЙ ИЗМЕРИТЕЛЬ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2014 |
|
RU2586411C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА СПИРАЛЬНЫХ ПРУЖИН | 0 |
|
SU267492A1 |
| JPS 61182509 A, 15.08.1986 | |||
| CN 105784347 A, 20.07.2016. | |||

