СО
ю го
05
Фив. 1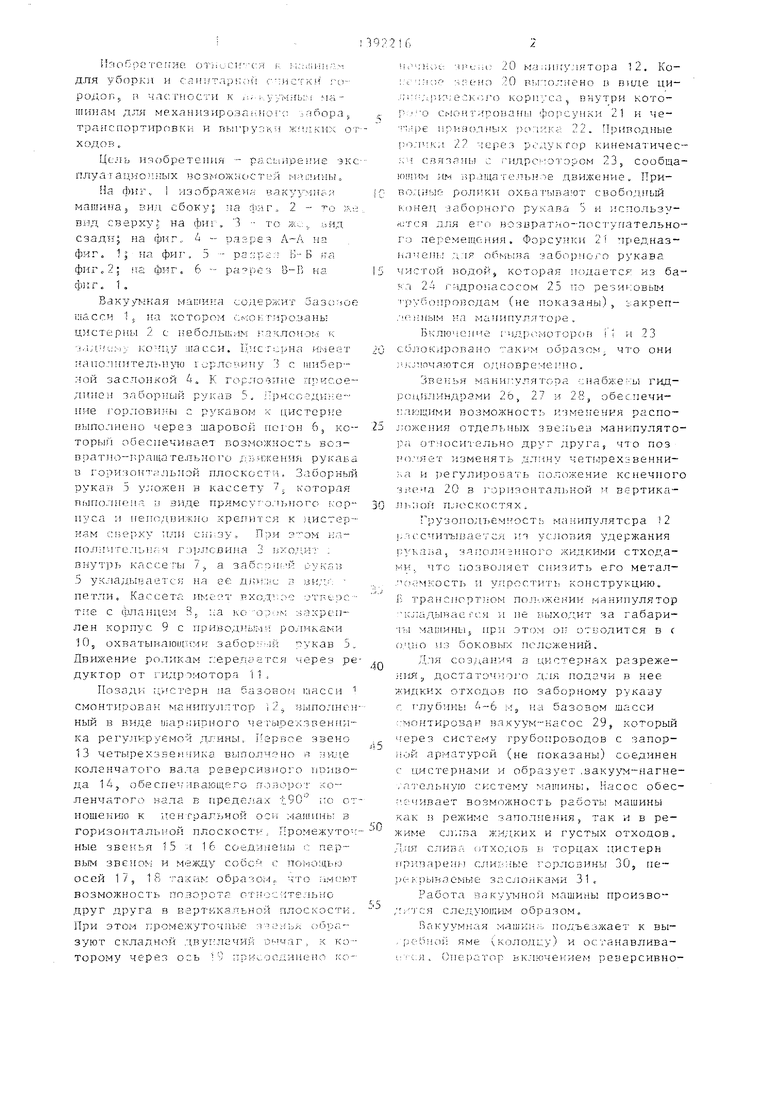
| название | год | авторы | номер документа |
|---|---|---|---|
| Ассенизационная машина | 1984 |
|
SU1165753A1 |
| Ассенизационная машина | 1979 |
|
SU783426A1 |
| Машина для удаления из выгребов бытовых отбросов | 1983 |
|
SU1201441A1 |
| Ассенизационная машина | 1977 |
|
SU632804A1 |
| Ассенизационная машина | 1984 |
|
SU1194986A1 |
| Ассенизационная машина | 1985 |
|
SU1296694A1 |
| Ассенизационная машина | 1979 |
|
SU859567A1 |
| Машина для внесения жидких органических удобрений | 1986 |
|
SU1396989A1 |
| Заправочно-загрузочное устройство машин для внесения жидких удобрений | 1983 |
|
SU1165260A1 |
| Ассенизационная машина | 1977 |
|
SU953124A1 |
Изобретение относится к машинам для уборки и санитарной очистки городов, а именно к вакуумным машинам для механизированного забора, транспортировки и выгрузки жидких отходов, Оно позволяет расширить экспл атаци- онные возможности машина за счет выполнения привода возвратно-поступательного перемещения заборного рукава 5в виде охватывающих заборный рукав приводных роликов, установленных в конечном звене 20 манипулятора и в кассете 7. Для обмыва заборного рукава 5 чистой водой конечное звено 20 манипулятора выполнено в виде цилиндрической моечной камеры с форсунками внутри, а первое звено 13 манипулятора установлено с возможностью перемещения в горизонтальной плоскости и соединено с реверсивным приводом. 6ил. с 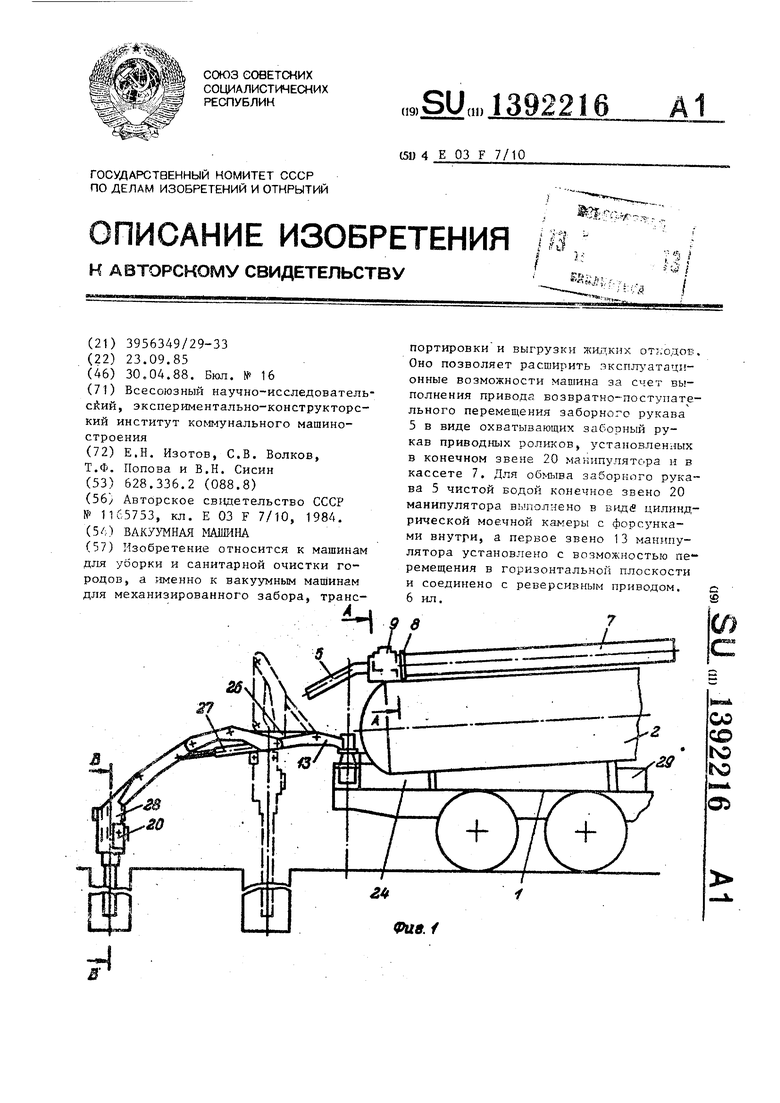
d
Паобро сспис огьсСИ ч:я /: ;;.:;а;им ч
для уборки и С Я 1П/ТЛрН;И f THCTK ГЧ -РОДОП, п частости к j;, :.умиь:м ма- ти лам ме.ханизнрозаьлюгс -чборЗз
транспортировка и ПЬП РУГГКИ Ж; ,. ОТ
ходов,
Цель ияобретения - pacLLiipeiine экс- плуа rasiHOMJZbix вoз южнocтeй r-sacmvibi.
На фиг, 1 изображе ;ч вакуумиа;- машитш 5 зил сбоку; -га inir. 2 - TO ;ь.;::
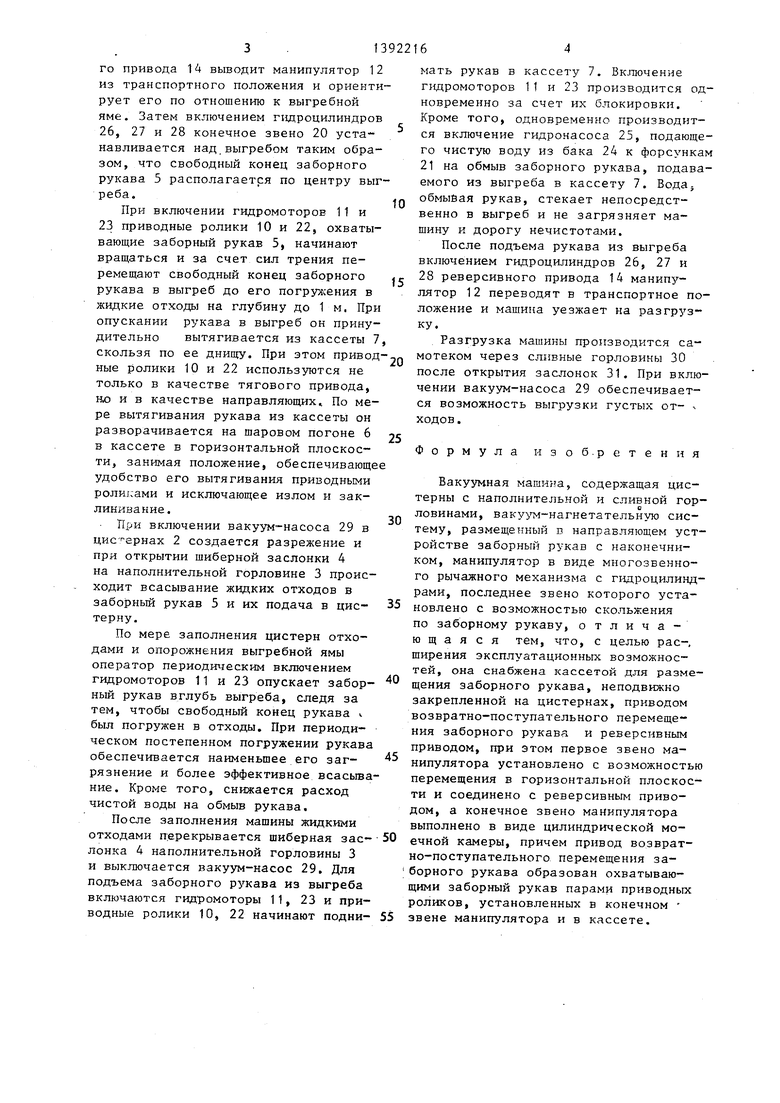
вид сверху на фиГ . 3 - то :-:,
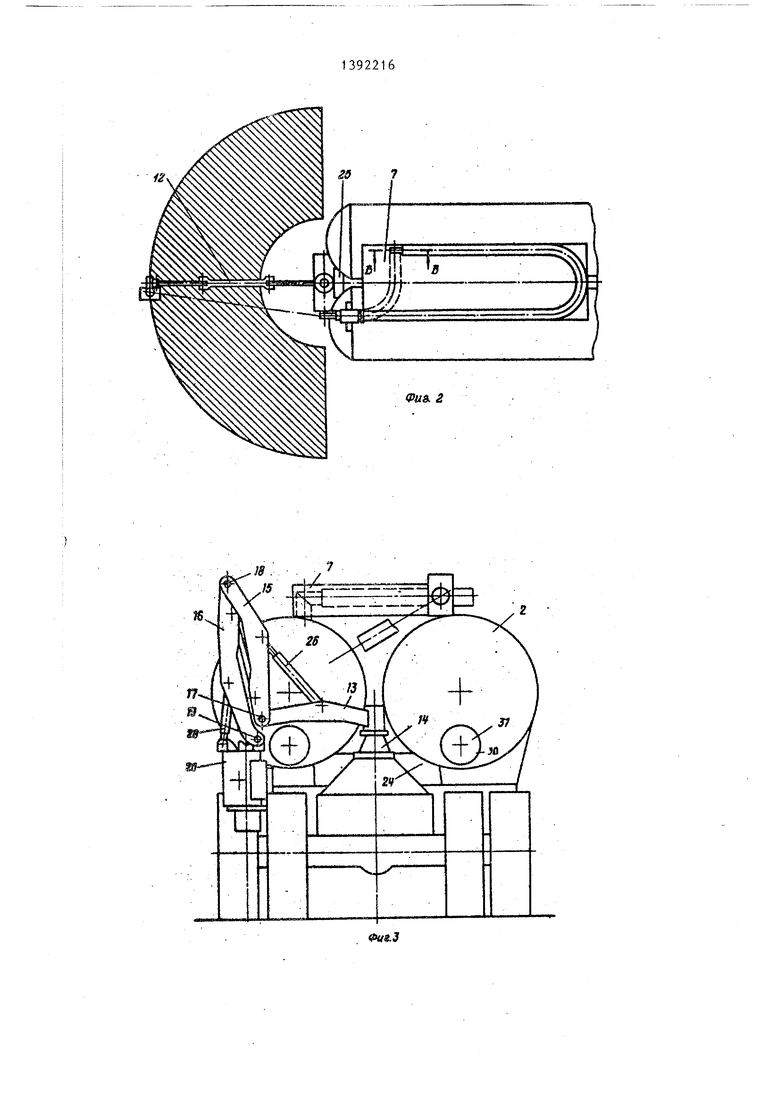
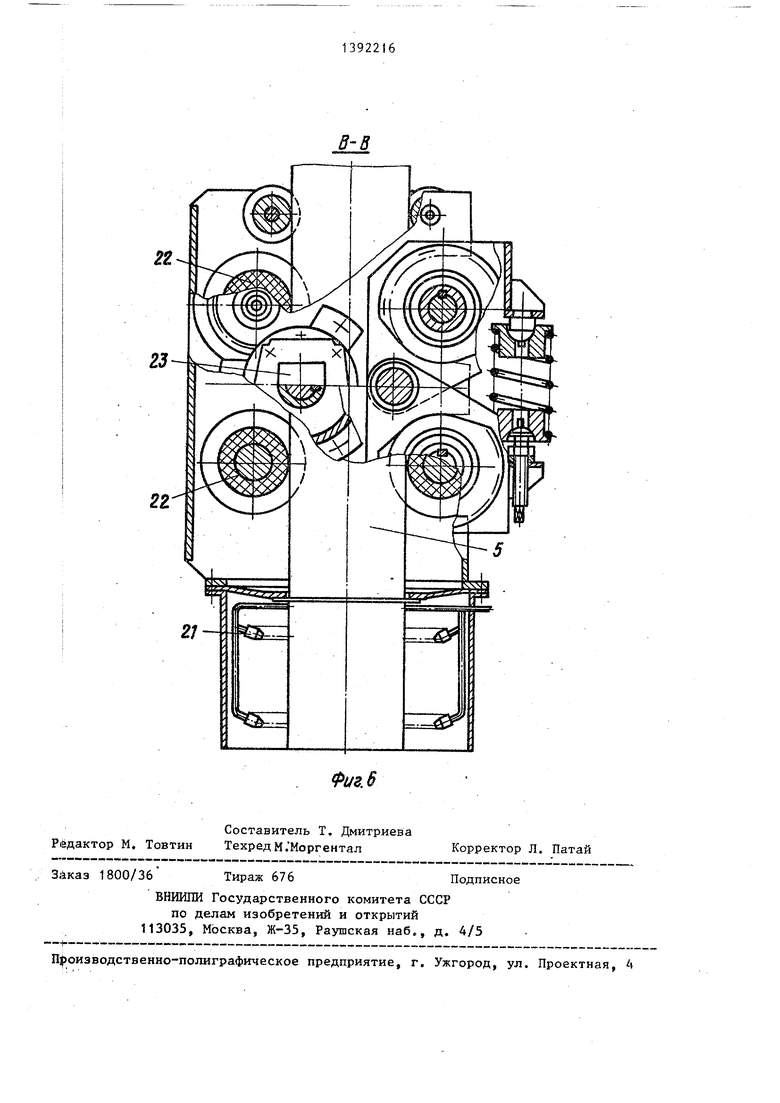
фиг. 1; на фиг. 5 - pa:;pe:j В-Б ла фиг. 2; пз. фиг. 6 - ра- роз 8-В на ф) I г „ 1 .
Вакуумная машина содерясит 5азс) iikiccH If на котором смоктировань; цмстерны 2 с неболыким ;-аклоном У;; аадч.;;ч; кочцу iiiaccH. Цистерна Hf -iecT наполнительную 1орлс ииу 3 с шиберной заслонкой 4, К гое:ювине гп исоепыпо. 1нено через шаровой погон 6, коJaoopKbm
рукаи 5 5 ;;ожен в кассету 7, которая пыпо.лнс иа и виде прямоуг о. :,:ор иуса и непо;1ви к о крепится к гщстер- нам CHjepxy с;;;;зу. При iia- fio.iinMTC. ibH;: ч r:jpj CBHna 3 иходит ; внутрь кассеты 7, а заб(:-:п11 : й рукан 5 у; ладывается }Ш ее д ;и:; С л вид,. . Кассета имесп нход -се jTBtnc- Tiie с (отанцем 3„ иа )ai захрсп- лен корпус 9 с приводнь М 1 ро.ликами 10, охватываго1лими забор:- :1й 5, Движение ролзгкам :.:ередаатся через редуктор от .lOTopa 11,
ПозадЕ-; гглстерн на базово.- шасси i смонтирован манипулятор 2 )- ный в виде uiap iuipHoro ге гырехзвенн:а- ка pei yjiv:pyeMO i длиньи ГЬэрвое звено 13 четырехзвенника вьгполчоно з ;5нде коле1 чатого вала реверс - 8ного псиво- да 14, обеспеч лваюа1;его rfonopcvr уо- ленчатогс; вала в 1 реде;|;ах по от- HomeKHj o к иснгральчой оси ма. нинь; з горизонтальной плоскостт--, Промежуто - иые звенья 15 л 16 соединеиь с: первым звеном и между собс с по1-10;|ДЬ(0 осей 17, 18 raкrt ; образо;-1„ чт(з амс-ют возможность поворота относительно друг друга в вертикальной плоскости. При этом промежуточные з- сгИзк образуют складн й л,вуг. , к которому через ось 9 прич осдинено ко0
ii(nuu 3 U;iH; 20 ;;и1;улятора 12. Ко- ;ч SLU Ho 20 рылол }ено в виде ци- Л -;-;л1 л;еск1Л (з корпуса, пкутри кото- Р О Сг- оитлронаны (Ьог сунки 21 и че bipe нр -1Нс:лMbix ролика 22. Приводные Р тлчкл 2 лерез р здукгор кинематичес- :: сзязан 1 с |Лщро: :О1Л)ром 23, сообща- кня им Л.М ;;р::лца тельное дви.жение. При- во,лиые ролглгО охватывают свобо;и ый коне.ц заборного рукава 5 и использу- кггся для е л-, возБрат.-ю-лостулательно- Г о :1еремеще|- ия. Форсу; ки 21 л;1едназ- na4eiib: для забор)юго рукава л истой водой, которая по/дается из ба- i л 2А j-идронасосом 25 по рези1-:овым рубонроводам (не показаны) ,, ;:акреп- , ; а м;; ипуллто1)е .
Бключенче идр(л.к)торсл1 it и 23 сблокировано образО М. Ч7 о они л i Jлoчaютcя одновре:-1е1лш .
Звенья манипулятора Л1абже -:ь5 гид- роди.линдрами 26,, 27 и 28, обеспечивающими позможность -:зменения распо- . Л5жения отдельных звеньев манкпулято- i;;i от: ос5- тельно друг друга, что поз т ол:яет л.зменять длину чет.ырехзвенни- :-.а и 1)е гулирозать положение кснечпого злеиа 20 в 1 оризонтал1)НОЙ - вертикальной ПЛОСЗ СОСЛГЯХ .
ГрузополЛ)емность маьл-шулятсра 12 ,лсслитъизае7с 1 и.з условия удержания рукаьа, заполнэнног о жидкими отходами, лто- позволяет сн ;зить его метал- . лс емкость и упростить конструкцию. {; трансно рт :ом положении манипулятор л;лaдьгr ac гс.я л не 11Ь ходит за габариты машины, при это ои отиодится в с o Uio из боковых положений.
;для созда1гля а ц15стерках разреже- г.ну. У достатэл 1ого для подали в нее жидких отходов но заборному рукаау
с ГЛ1убЛКЬ
-D М.
5
::монтирозан вакуук-насос 29, который лерез систему трубопроводов с запорной арматурой (не показаны) соединен с цистернами и образует ,заку м-нагне- /а1 ельну1о с:кстему г--:ап1ины, Насос обес- Л чивает возможность р)аботь машины как в режиме залолне.ния, так и в режиме сллва ,ких и густых отходов, , 1ля слива (лгходов и торцах цистерн приларенм cJiи;;лыe орловины 30, перекрываемые заслонками 31.
Работа закуумно; машины произво- следуюид-м образом.
Вакуумная MaiuHii;;, подъезжает к вы- ,ребной яме колодцу) и останавлива- с:ся. Отгератор включением реверсивно3 . 13
го привода 14 выводит манипулятор 12 из транспортного положения и ориентирует его по отношению к выгребной яме. Затем включением гидроцилиндров 26, 27 и 28 конечное звено 20 уста навливается над.выгребом таким образом, что свободный конец заборного рукава 5 располагается по центру выгреба,
При включении гидромоторов 11 и 23 приводные ролики 10 и 22, охватывающие заборный рукав 5, начинают вращаться и за счет сил трения перемещают свободный конец заборного рукава в выгреб до его погрух вния в жидкие отходы на глубину до 1 м. При опускании рукава в выгреб он принудительно вытягивается из кассеты 7 скользя по ее днищу. При этом привод ные ролики 10 и 22 используются не только в качестве тягового привода, шэ и в качестве направляющих. По мере вытягивания рукава из кассеты он разворачивается на шаровом погоне 6 в кассете в горизонтальной плоскости, занимая положение, обеспечивающе удобство его вытягивания приводными роликами и исключающее излом и заклинивание.
При включении вакуум-насоса 29 в цис- ернах 2 создается разрежение и при открытии щиберной заслонки 4 на наполнительной горловине 3 происходит всасывание жидких отходов в рукав 5 и их подача в цис- терну.
По мере заполнения цистерн отходами и опорожнения выгребной ямы оператор периодическим включением гидромоторов 11 и 23 опускает забор- ный рукав вглубь выгреба, следя за тем, чтобы свободный конец рукава v был погружен в отходы. При периодическом постепенном погружении рукава обеспечивается наименьшее его заг- рязнение и более эффективное всасывание. Кроме того, снижается расход чистой воды на обмыв рукава.
После заполнения машины жидкими отходами перекрывается шиберная заслонка 4 наполнительной горловины 3 и выключается вакуум-насос 29. Для подъема заборного рукава из выгреба включаются гидромоторы 11, 23 и приводные ролики 10, 22 начинают подни-
64
мать рукав в кассету 7. Вк.гпочение пщромоторов 1 1 и 23 производится одновременно за счет их блокировки. Кроме того, одновременно производится включение гидронасоса 25, подающего чистую воду из бака 24 к форсункам 21 на обмыв заборного рукава, подаваемого из выгреба в кассету 7. Вода, обмывая рукав, стекает непосредственно в выгреб и не загрязняет машину и дорогу нечистотами.
После подъема рукава из выгреба включением гидроцшшндров 26, 27 и 28 реверсивного привода 14 манипулятор 12 переводят в транспортное положение и машина уезжает на разгрз з- ку.
Разгрузка машины производится самотеком через сливные горловины 30 после открытия заслонок 31. При включении вакуум-насоса 29 обеспечивается возможность выгрузки густых от- ходов.
Формула изоб.ретения
Вакуумная машина, содержащая цистерны с наполнительной и сливной горловинами, вакуум-нагнетательную систему, размещенный в направляющем устройстве заборный рукав с наконечником, манипулятор в виде многозвенного рычажного механизма с пздроцилинд- рами, последнее звено которого установлено с возможностью скольжения по заборному рукаву, о т л и ч а - ю щ а я с я тем, что, с целью рас-, ширения эксплуатационных возможностей, она снабжена кассетой для размещения заборного рукава, неподвижно закрепленной на цистернах, приводом возвратно-поступательного перемещения заборного рукава и реверсивным приводом, при этом первое звено манипулятора установлено с возможностью перемещения в горизонтальной плоскости и соединено с реверсивным привоом, а конечное звено манипулятора выполнено в виде цилиндрической моечной камеры, причем привод возврато-поступательного перемещения за- борного рукава образован охватываюими заборный рукав парами приводных оликов, установленных в конечном вене манипулятора и в кассете.
12
I 9
ФигЛ
Фиг. 5
22
| Ассенизационная машина | 1984 |
|
SU1165753A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
