Изобретение откосится к сельскому хозяйству и может быть использовано для управления технологическими процессами на рисовых оросительных системах.
Цель изобретения - повышение качества, надёжности управления, снижение капитальных затрат.
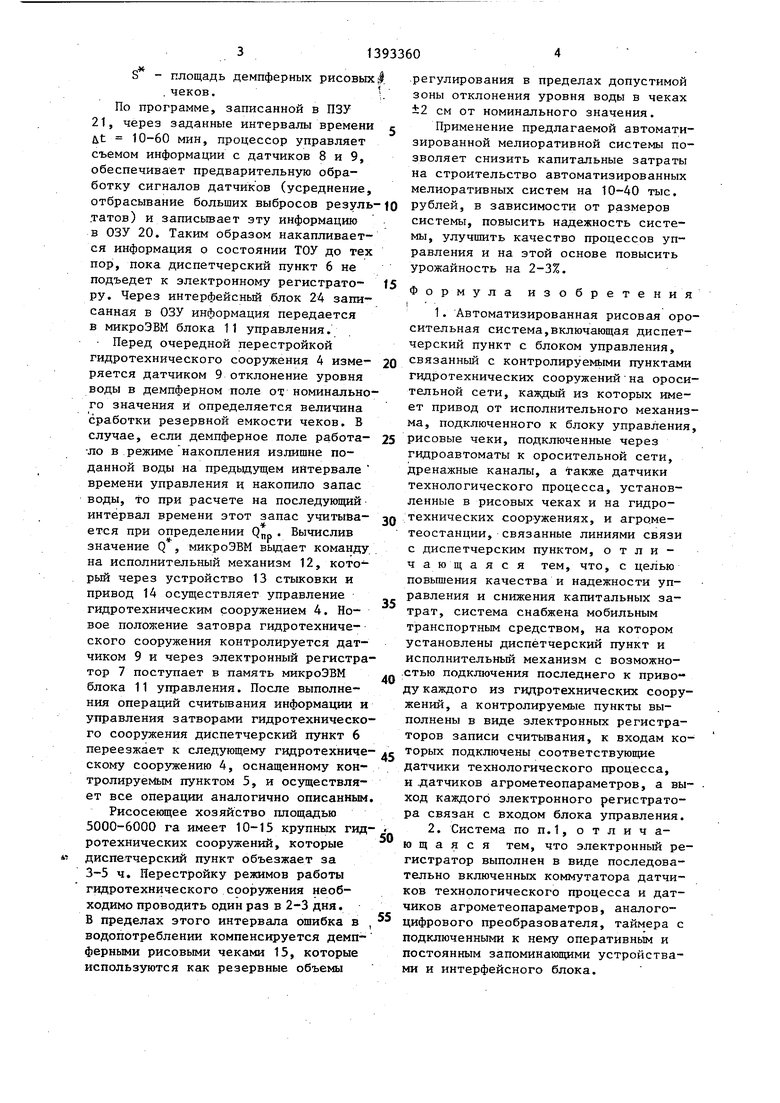
На фиг.1 показана предлагаемая система, вид сверху; на фиг.2 - диспетчерский и контролируемый пункты; на фиг.З - орошаемое рисовое поле; на фиг,4 блочная схема электронного регистратора.
Система состоит из водоисточника 1, орошаемых рисовых полей 2, сети оросительных и дренажных каналов
3с гидротехническими сооружениями
4и контролируемыми пунктами 5,- передвижного диспетчерского пункта 6. Контролируемый пункт 5 содержит электронный регистратор 7, к котором подключают датчики 8 агрометеопара- метров и технологические датчики 9. Диспетчерский пункт 6 размещен на мобильном транспортном средстве (автомобиле 10) и включает блок 11 управления, оснащенный rикpoЭBM, и исполнительный механизм 12. Последний имеет-устройство 13 стыковки с приводом 14 затворов гидротехнических сооружений 4.
В состав каждого орошаемого рисового поля 2 входят, наряду с обычными чеками, также демпферные рисовы чеки 15. Подча воды во все чеки осуществляется при помощи гидроавтоматов 16 уровня нижнего бьефа. На во- довыщ сках в демпферные рисовые чеки устанавливают гидроавтоматы 17 смешанного регулирования.На водовыпуске в ороситель демпферных чеков 15 устанавливается расходомер 18.
Электронный регистратор 7 включает процессор с таймером 19, оперативное запоминающее устройство (ОЗУ) 205постоянное запоминающее устройство (ПЗУ) 21, аналого-цифровой преобразователь 22, соединенный через коммутатор 23 с датчиками 8 и 9, и интерфейсный блок 24.
Микроэвм включает стандартные блоки: процессор, ОЗУ, внешнее запоминающее устройство (магнитофон и гибкие диски), цифровое печатное устройство, дисплей и клавиатуру, устройство связи с объектом, через которое микроэвм блока 11 управления подклю0
0
чается к электронному регистратору 7. В качестве микроЭВМ можно использовать устройства: ЛВК-2(3), Электроника-60 (15 ВУМС); ЕС 1840 или IBM-PC.
Привод затворов гидротехнических сооружений представляет собой исполнительный механизм 12, состоящий из следующих известных функциональных элементов: редуктора, электро- или пневмопривода, соединенного с энергетической установкой автомобиля 10. Привод включается по команде блока 11 управления, по командам микроЭВМ.
Система работает следующим образом.
Диспетчерский пункт 6 подъезжает к орному. из гидротехнических сооружений 4 и подключается к электронному регистратору 7 и приводу 14 затвора гидротехнического сооружения.При этом происходит перезапись информации, накопленная в памяти электрон- ного регистратора 7 об агрометеопа- раметрах и технологических парамет- 5 Рах (положение затвора, значения
уровней и расходов воды). Эта информация обрабатывается на микроЭВМ, которая сопоставляет расход воды, прошедшей через гидротехническое сооружение за прошедший интервал времени, с расчетным водопотребле- нием, полученньм при обработке агро- метеопараметров и данных об уровнях воды в демпферных рисовых чеках.
Таким образом, блок управления посредством микроЭВМ оценивает состояние технологического объекта управления (ТОУ) по информации, поступающей с электронных регистраторов 7. Микроэвм вычисляет отклонение технологических режимов от заданных и определяет новое положение затвора гидротехнического сооружения, которое необходимо обеспечить для компенсации отклонений технологических параметров ТОУ.
При этом величина коррекции водо- подачи определяется по формуле
0
5
0
5
uQ (Q - Q
р
S ) -g.;
5
где Q
S фактический расход воды в демеферное рисовое поле; прогнозный расход воды, который должен был поступать в демпферное поле; суммарная площадь управляемого участка рисовой системы;
S - площадь демпферных рисовых чеков.
По программе, записанной в ПЗУ 21, через заданные интервалы времени ut 10-60 мин, процессор управляет съемом информации с датчиков 8 и 9, обеспечивает предварительную обработку сигналов датчиков (усреднение, отбрасывание больших выбросов резуль .татов) и записывает эту информацию в ОЗУ 20. Таким образом накапливается информация о состоянии ТОУ до тех пор, пока диспетчерский пункт 6 не подъедет к электронному регистрато- ру. Через интерфейсный блок 24 записанная в ОЗУ информация передается в микроэвм блока 11 управления. Перед очередной перестройкой гидротехнического сооружения 4 изме- ряется датчиком 9 отклонение уровня воды в демпферном поле от номинального значения и определяется величина сработки резервной емкости чеков. В случае, если демпферное поле работа- -ло в режиме накопления излишне поданной воды на предыдущем интервале времени управления и накопило запас воды, то при расчете на последующий интервал времени этот запас учитыва- ется при определении . Вычислив значение Q , микроЭВМ вьщает команду на исполнительный механизм 12, который через устройство 13 стыковки и привод 14 осуществляет управление гидротехническим сооружением 4. Новое положение затовра гидротехнического сооружения контролируется датчиком 9 и через электронный регистратор 7 поступает в память микроЭВМ блока 11 управления. После выполнения операций считьшания информации и управления затворами гидротехническо
1. Автоматизированная рисовая оросительная система,включающая диспетчерский пункт с блоком управления, связанный с контролируемыми пунктами гидротехнических сооружений на оросительной сети, каждьш из которых имеет привод от исполнительного механизма, подключенного к блоку управления, рисовые чеки, подключенные через гидроавтоматы к оросительной сети, дренажные каналы, а также датчики технологического процесса, установленные в рисовых чеках и на гидротехнических сооружениях, и агроме- теостанции, связанные линиями связи с диспетчерским пунктом, отличающаяся тем, что, с целью повышения качества и надежности управления и снижения капитальных затрат, система снабжена мобильным транспортным средством, на котором установлены диспетчерский пункт и исполнительный механизм с возможно- .стью подключения последнего к приводу каждого из гидротехнических сооружений, а контролируемые пункты выполнены в виде электронных регистраторов записи считывания, к входам кого соор5 ения диспетчерский пункт 6 переезжает к следующему гидротехниче- с торых подключены соответствующие скому сооружению 4, оснащенному кон- датчики технологического процесса, тролируемым пунктом 5, и осзтцествля- и датчиков агрометеопараметров, а вы- ет все операции аналогично описанным. ход каждого электронного регистрато- Рисосеющее хозяйство площадью
ра связан с входом блока управления.
5000-6000 га имеет 10-15 крупных гид- ротехнических сооружений, которые диспетчерский пункт объезжает за 3-5 ч. Перестройку режимов работы гидротехнического сооружения необходимо проводить один раз в 2-3 дня. В пределах этого интервала ошибка в водопотреблении компенсируется демпферными рисовыми чеками 15, которые используются как резервные объемы
с O 5 0 5 Q л
5
регулирования в пределах допустимой зоны отклонения уровня воды в чеках i2 см от номинального значения.
Применение предлагаемой автоматизированной мелиоративной системы позволяет снизить капитальные затраты на строительство автоматизированных мелиоративных систем на 10-40 тыс. рублей, в зависимости от размеров системы, повысить надежность системы, улучшить качество процессов управления и на этой основе повысить урожайность на 2-3%.
Формула изобретения
1. Автоматизированная рисовая оросительная система,включающая диспетчерский пункт с блоком управления, связанный с контролируемыми пунктами гидротехнических сооружений на оросительной сети, каждьш из которых имеет привод от исполнительного механизма, подключенного к блоку управления, рисовые чеки, подключенные через гидроавтоматы к оросительной сети, дренажные каналы, а также датчики технологического процесса, установленные в рисовых чеках и на гидротехнических сооружениях, и агроме- теостанции, связанные линиями связи с диспетчерским пунктом, отличающаяся тем, что, с целью повышения качества и надежности управления и снижения капитальных затрат, система снабжена мобильным транспортным средством, на котором установлены диспетчерский пункт и исполнительный механизм с возможно- .стью подключения последнего к приводу каждого из гидротехнических сооружений, а контролируемые пункты выполнены в виде электронных регистраторов записи считывания, к входам торых подключены соответствующие датчики технологического процесса, и датчиков агрометеопараметров, а вы- ход каждого электронного регистрато-
торых подключены соответствующие датчики технологического процесса, и датчиков агрометеопараметров, а вы- ход каждого электронного регистрато-
ра связан с входом блока управления.
2. Система по п.1, отличающаяся тем, что электронный регистратор выполнен в виде последовательно включенных коммутатора датчиков технологического процесса и датчиков агрометеопараметров, аналого- цифрового преобразователя, таймера с подключенными к нему оперативным и постоянным запоминающими устройствами и интерфейсного блока.
JS
Выходной интердзеис (н поз. if)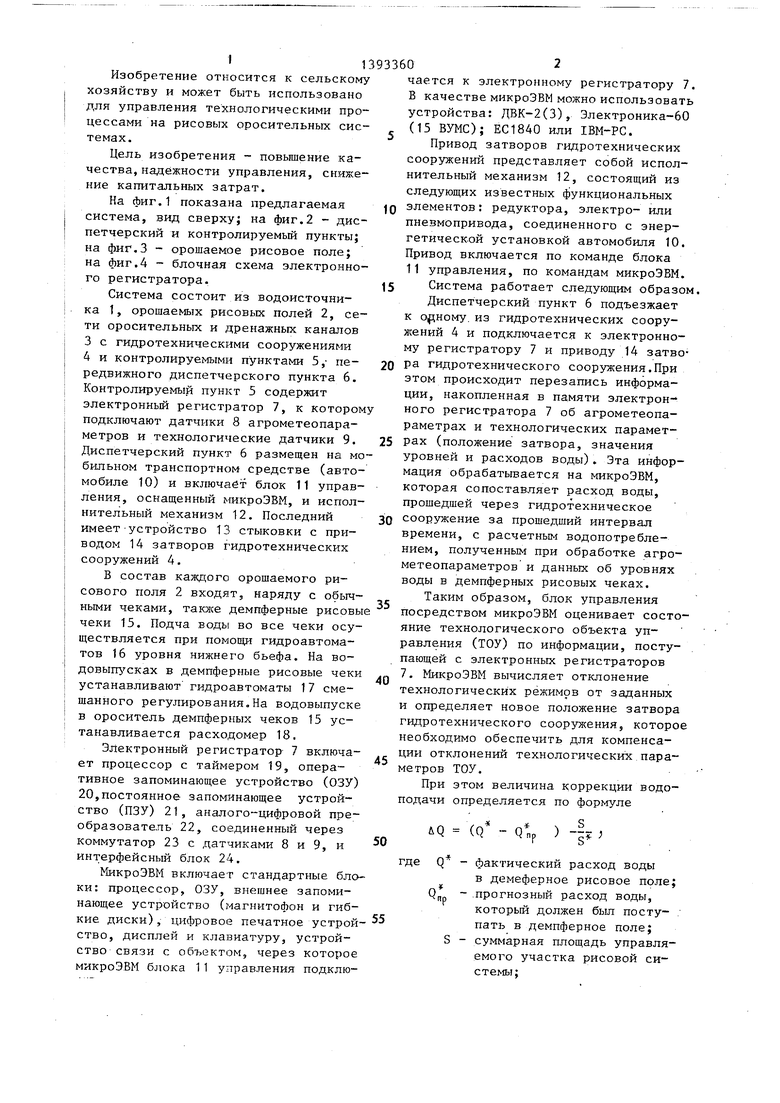
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ водораспределения на рисовых оросительных системах | 1983 |
|
SU1155199A1 |
| Автоматизированная рисовая оросительная система | 1986 |
|
SU1329683A1 |
| Автоматизированная рисовая оросительная система | 1985 |
|
SU1392196A1 |
| Способ водораспределения на рисовых оросительных системах | 1986 |
|
SU1521388A2 |
| Автоматизированная рисовая оросительная система | 1986 |
|
SU1434388A1 |
| Способ водораспределения на рисовых оросительных системах | 1986 |
|
SU1372013A2 |
| Автоматизированная оросительная система | 1981 |
|
SU1009345A1 |
| Автоматизированная оросительная система | 1981 |
|
SU1011777A1 |
| ГИДРОАВТОМАТ СИФОННОГО ТИПА | 2007 |
|
RU2378679C2 |
| Автоматизированная оросительная система | 1986 |
|
SU1328429A1 |

Изобретение относится к сельскому хозяйству. Целью изобретения является повышение качества и надежности управления и снижение капитальных затрат.Автоматизированная рисовая оросительная система включает передвижной (на автомобиле 10) диспетчерский пункт, оснащенный блоком управления 11с микроЭВМ и исполнительным -механизмом 12, подключаемым к приводу 14 затворов гидротехнических сооружений (ГС). Орошаемые рисовые поля включают как обычные, так и димпферные рисовые чеки, а также сеть оросительных и дренажных каналов 3 с ГС. Рядом с ГС контролируемь е пункты оборудуются датчиками, связанными с датчиками 8 агрометеопарамет- ров и датчиками 9 технологического состояния оборудования. Контролируемые пункты выполнены в виде электронных регистраторов на основе таймера, интерфейсных блоков и запоминающих . устройств для периодической записи и последующей передачи в блок управления 11 показаний датчиков 8 и .9. Выполнение диспетчерского пункта в виде мобильного передвижного управляющего устройства с приспособлениями для подключения к установленным на объекте электронным регистраторам и приводам .затворов ГС позволяет использовать один исполнительный механизм для привода затворов всех ГС при объезде системы и -с максимальной оперативностью и точностью прогнозирования управлять процессом орошения. 1 з.п. ф-ль1, 4 ил. с 9 (Л 00 00 00 Од
| Способ водораспределения на рисовых оросительных системах | 1983 |
|
SU1155199A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
