I;D
00
4
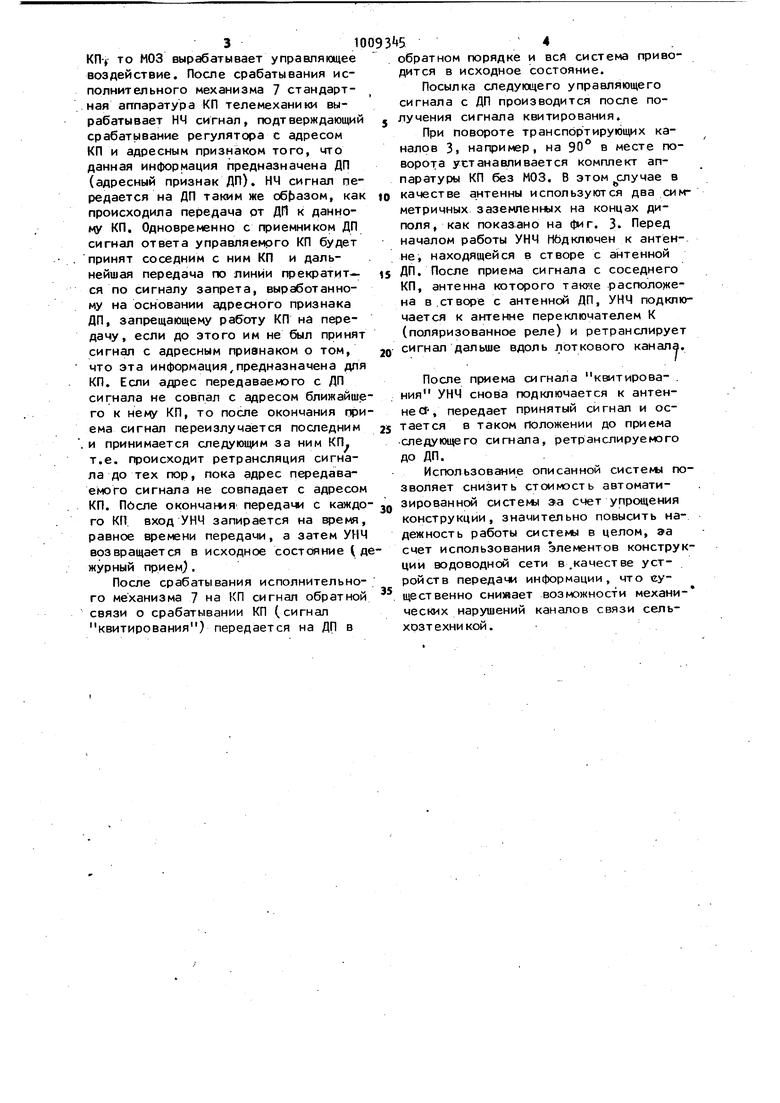
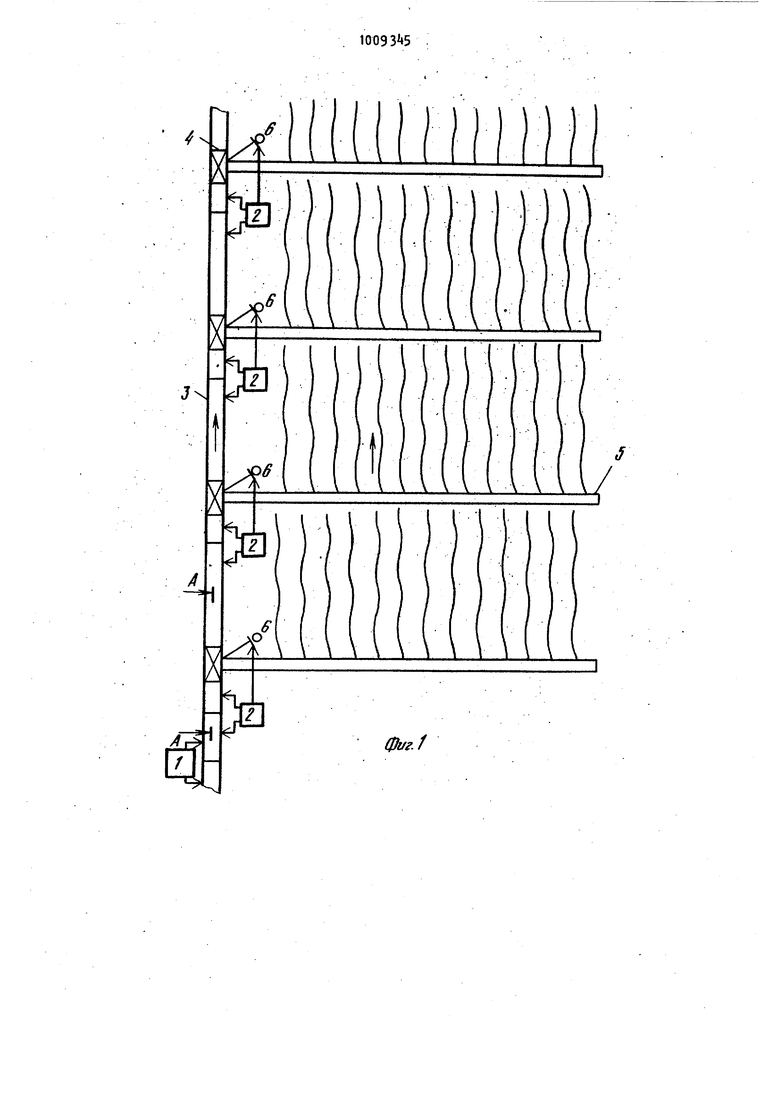
сд Изобретение относится к сельскому водному хозяйству и может быть использовано при автоматизации водорас пределения на.оросительных системах, использукйдих поливные лотки. Известна оросительная система с поливными лотками, содержащая водозаборное сооружение и сеть распределительных и поливных лотков, оснащенных гидротехническими сооружениями и водовыпускными трубками L1j; Недостатком данной системы является недостаточная оперативность управления и большие затраты ручного труда из-за того, что перемещение контрольных пере1 ычек на лотках осуществляется вручную. Известна также автоматизированная оросительная система, включающая, открытые лотковые перпендикулярно друг другу расположенные транспортирующие и отводяи4ие каналы с гидродействующими затворами, управляемыми по.сигналам exaнизмoв отработки задания на контролируе№1х пунктах, снабженных при емо-пере датчиками с антенными диполями для радиорелейной связи между собой и с диспетчерским пунктом 2 Недостатком этой систем. является сложность конструкции и недостаточ ная надежность, вызванные размещением на контролируемых пунктах антенных диполей значительных -размеров. Целью изобретения является упрощение конструкции системы и повышение надежности. . Эта цель достигается тем, что оба отрезка антенного диполя приемо-передатчиков контролируе№Гх пунктов выполнены в виде заземленных на концах участков арматуры смежных секций лотков, электрически изолированных друг от друга и от соседних секций, при-, чем контролируемые пункты для передачи сигналов между перпендикулярно рас пoлoжeнны ft1 лотками снабжены переключателями диполей в секциях этих лотков. На фиг.- 1 показана система, вид в плане; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - место соединения двух - перпендикулярных лотков, вид в плане. Автоматизированная оросительная система включает диспетчерский пункт (ДП)1, контролируемые пункты(кг1 , расположенные на транспортирую-щем лотковом канале 3. На транспортирующем канале 3 установлены также гид родействую1 4ие затворы , осуществляющие подпор воды перед водовыпусками в отводящи.е каналы 5. Водовыпуски в поливные латки оснащаются гидроавтоматами с телеизменяемой установкой 6. Сигнал управления с выхода контролируемого пункта 2 поступает на гидроавтомат с телеизменяемой установкой 6. Контролируемый пункт 2 содержит .реверсивный усилитель низкой частоты (УНЧ), играющий роль при емо пере дат i iкд} стандартную аппаратуру КП телемеханики, механизм отработки задания (МОЗ), выход которого подключен ко входу исполнительного механизма 7, осуществляющего изменение уставки гидроавтомата 6, автономные исто.чники питания (ИП). Вход-выход УНЧ подключен .к арматуре 8 двух смежных секций транспортирующего лоткового канала 3. Арматура двух других концов смежных секций заземлена с помощью заземлителей 9. Секции транспортирующего канала 3 разделены диэлектри- ческими вставками 10. Контролируемые пункты между двумя взаимно перпендикулярными каналами снабжены переключателями К диполей. Система работает следующим образом. На ДП вырабатывается низкочастотный (НЧ) сигнал команды на включение или отключение (изменение уставки) гидрорегулятора, заданного адресом отводящего канала 5. НЧ сигнал с ДП содержит также адресный признак, что данная .информация предназначена для КП. Сигнал команды через УНЧ подается на арматуру двух смежных секций транспортирующего канала 3, разделенных диэлектрической вставкой 10 и заземленных на концах заземлитепями 9. Арматура двух смежных секций, к которым подводится НЧ сигнал, образует антенну в виде симметричного диполя, заземленного на концах и расположенного у границы раздела ВоздухЗемля, Диполь излучает электромагнитный сигнал с максимумом излучения вдоль образующих его проводов. Излучаемое электромагнитное поле принимается такой же антенной ближайщего, КП, преобразует его в НЧ сигнал, который поступает на вход УНЧ и после усиления на вход стандартной аппаратура КП телемеханики. Если адрес передаваемого сигнала совпал с адресом ближайщего к диспетчерскому пункту КП то МОЗ вырабатывает управляющее воздействие. После срабатывания исполнительного механизма 7 стандартная аппаратура КП телемеханики вырабатывает НЧ сигнал, подтверждающий срабатывание регулятора с адресом КП и адресным признаком того, что данная информация предназначена ДП (адресный признак ДП). НЧ сигнал передается на ДП таким же об{)азом, как происходила передача от ДП к данному КП. Одновременно с приемником ДП сигнал ответа управляемого КП будет принят соседним с ним КП и дальнейшая передача по линии прекратится по сигналу запрета, выработанному на основании адресного признака ДП, запрещающему работу КП на передачу, если до этого им не был принят сигнал с адресным признаком о том, что эта информация,предназначена для КП. Если адрес передаваемого с ДП сигнала не совпал с адресом ближайше го к нему КП, то после окончания при ема сигнал переизлучается последним и принимается следующим за ним КП. т.е. происходит ретрансляция сигнала до тех пор, пока адрес передаваемого сигнала не совпадает с адресом КП. Пйсле окончания передачи с каждо го КП вход УНЧ запирается на щземя, равное времени передачи, а затем УНЧ возвращается в исходное состояние i д журный прием) . После срабатывания исполнительного механизма 7 на КП сигнал обратной связи о срабатывании КП (сигнал квитирования) передается на ДП в обратном порядке и вей система приводится в исходное состояние. Посылка следующего управляющего сигнала с ДП производится после получения сигнала квитирования. При повороте транспортирующих каналов 3| например, на 90 в месте поворота устанавливается комплект аппаратуры КП без МОЗ. В этом случае в качестве антенны используются два симметричных заземленных на концах диполя, как показано на фиг. 3. Перед началом работы УНЧ Нбдключен к антенне, находящейся в створе с антенной ДП. После приема сигнала с соседнего КП, антенна которого также расположена в.створе с антенной ДП, УНЧ подключается к антенне переключателем К (поляризованное реле) и ретранслирует сигнал дальше вдоль лоткового канала. После пр)иема сигнала квитирова- . ния УНЧ снова подключается к антенне ОТ- , передает принятый сигнал и остается в таком положении до приема следующего сигнала, ретранслируемого до ДП. Использование описанной системы позволяет снизить стоимость автоматизированной система эа счет упрощения конструкции, значительно повысить надежность работы системы в целом, эа счет использования элементов конструкции водоводной сети в.качестве устройств передачи информации, что существенно снижает возможности механи- ческих нарушений каналов связи сельхозтехникой.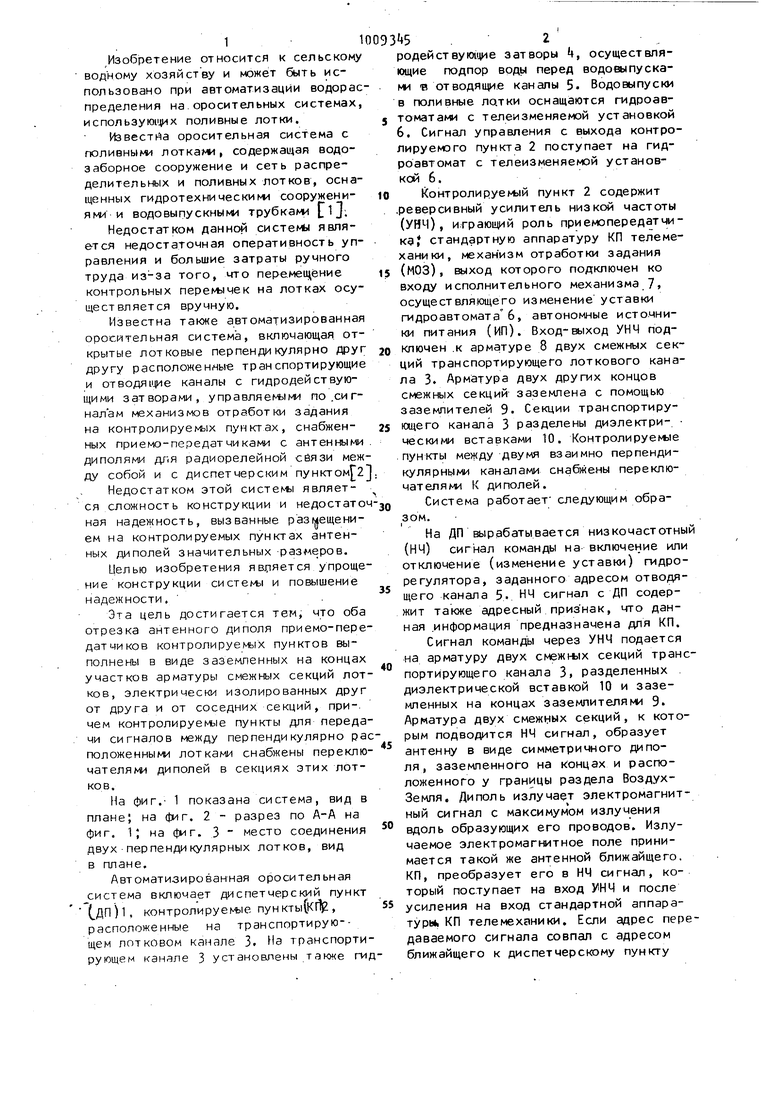
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная оросительная система | 1982 |
|
SU1102528A1 |
| Автоматизированная открытая оросительная система | 1983 |
|
SU1144663A1 |
| Автоматизированная оросительная система | 1981 |
|
SU1011777A1 |
| Устройство для передачи информации | 1974 |
|
SU488245A1 |
| Система телемеханики | 1983 |
|
SU1149296A1 |
| АВТОМАТИЗИРОВАННАЯ ЛОТКОВАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА | 1992 |
|
RU2028765C1 |
| Устройство для телеуправления иТЕлЕСигНАлизАции пО СилОВыМРАСпРЕдЕлиТЕльНыМ СЕТяМ | 1979 |
|
SU824261A1 |
| Система телемеханики для рассредоточенных объектов | 1975 |
|
SU556477A1 |
| Устройство телесигнализации | 1980 |
|
SU953649A1 |
| ВПТ5 Щ тШп^^:^ | 1973 |
|
SU408363A1 |
АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА, содержащая от1 рытЫе перпендикулярно друг другу расположенные транспортирующие и отводжцие лотковые каналы с гидродействукмф км затворами, управляекъ ми по сигналам механизмов отработки задания на контролируемых пунктах, снабжениях приемо-передатчиками с антенныии д поля 1 для радиорелейной связи между со.брй и между диспетчерским пунктом, . о т л и ч а ю щ а я с я тем, что, с целью упроще1№1я ее конструкции и . повышения надежности, оба отрезка антенного 1поля приемо-пере датчиков контролируемлх пуиктов выполнены в .виде заземленных на концах участков арматуры смежных секций лотковых каналов, электрически. изолиров |ных друг от друга и от соседних секций, причем коктропируемле пункты для .переда1«1 сигналов между перпендикулярно расположенным1 каналами снабжены переключателем гюлей в секциях этих каналов.
Li
X
nil
/f
}(
Л|
f
X
V
Фиг.
fO
fO
Иё т25 5
/
/
/
V
fff8 4-/4
ff f fff
,#
фиг. г
Т
/ /
FHr
8 J
/ff
8
| U Бочкарев Я | |||
| В | |||
| Основы ,автоматики и автоматизации производственных процессов в гидромелиорации | |||
| М. | |||
| Колос, 1969, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Панкин М.З | |||
| Автоматизация и телемеханизация производственных -.процессов | |||
| М | |||
| , Колос, 1977, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
