113
Изобретение относится к электроизмерительной технике, в частности к области измерения нагфяженности электрического поля Земли, и может быть :использовано при проведении как само- летных метеорологических,так и других исследований электростатических полей .
Цель изобретения - увеличение точности измерений путем учета заряда летательного аппарата.
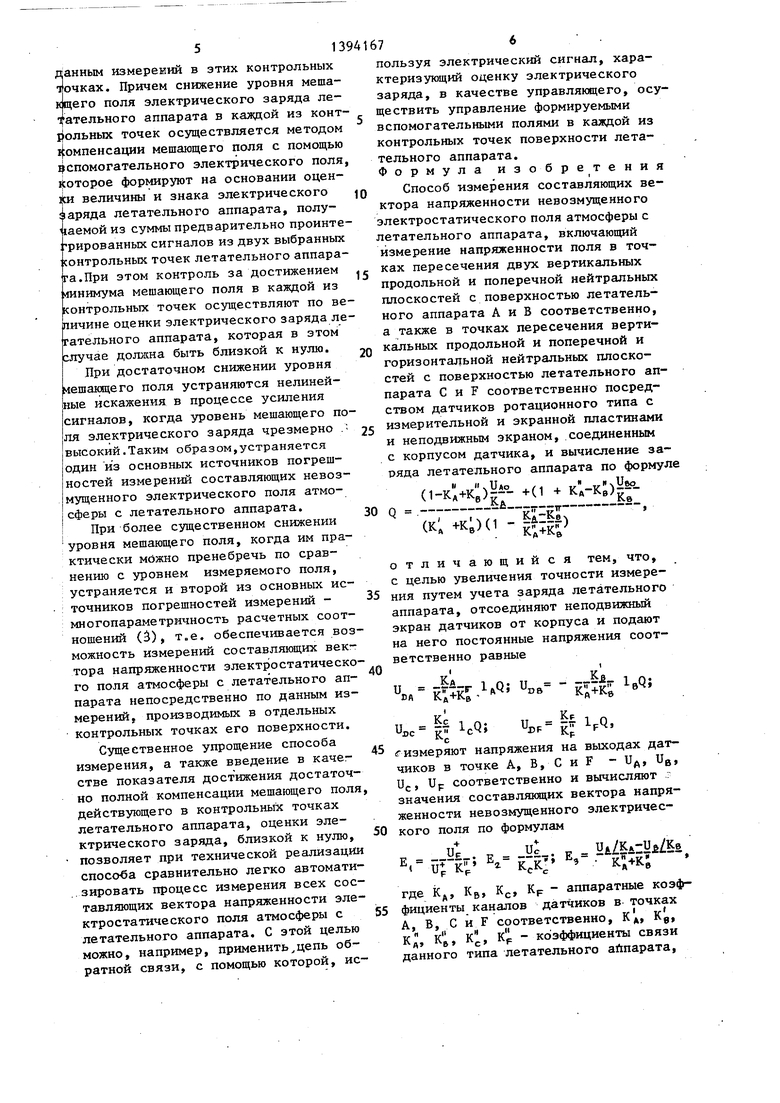
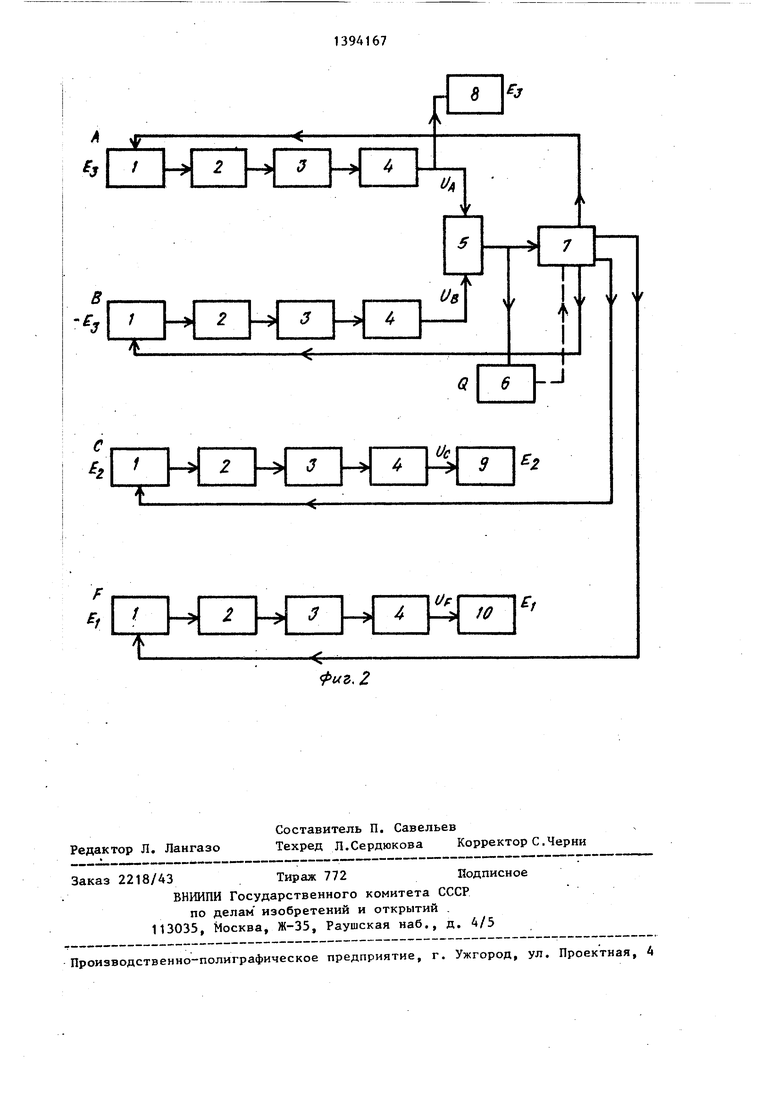
На фиг. 1 показаны места установки датчиков на летательном аппарате; на фиг. 2 - структурная электрическая схема устройства, реализующего пред- лагаемьй способ.
Устройство для реализации способа измерения составляющих вектора напряженности невозмущенного электростати- ческого поля атмосферы с летательного аппарата содержит датчики 1 поля (устанавливаются в контрольных точках А, В, С и F поверхности летательного апарата) ротационного типа с измерительной и экранной пластинами и неподвижным экраном, усилитель
2сигналов датчиков поля, детекторы
3огибанщих сигналов, интеграторы
4с регулируемыми постоянными време- ни, суммирующий блок 5, блок 6 измерения (оценки), блок 7 (или усилитель формирования управляющих напряжений, подаваемых на управляющие электроды датчиков с целью компенсации мешающего поля, измеритель 8 составляющей
Ej, измеритель 9 составляющей Е, измеритель 10 составляющей Е,.
Устройство работает следующим образом.
Пусть измерения составляющих (Е,, Е, Е) вектора (Е) напряженности невозмущенного электростатического поля атмосферы производят с летательного аппарата, проводящая поверхность которого условно представлена в виде параллелепипеда (фиг. 1). Контрольные точки А, В, С и F выбраны на поверхности летательного аппарата в местах пересечения ортогональных нейтральных плоскостей, причем в данном случае А и В выбраны особо (т.е. АВ Ц Eg).
В каждой из контрольных точек (А, В, С и F) на поверхности летательного аппарата располагают по датчику 1 поля (например, ротационного типа с плоскими пластинами), с помощью которых преобразуют величины и знаки на- пряженностей поля, действующих в этих
Q
5
0 5
о
0
е
5
0
5
672
точках, в электрические сигналы (фиг. 2). Затем эти сигналы усиливают с помощью усилителей 2 низкой частоты, детектируют с помощью детекторов 3 и интегрируют с помощью интеграторов 4 с элементами регулирования постоянных времени интегрирования (например КС-цепи с регулируемыми параметрами) . Затем в пропорции, учитьшаю- щей коэффициенты связи, суммируют . сигналы из выбранных контрольных точек А и В с помощью суммирукяцего блока 5, на выходе которого получают электрический сигнал, по величине и полярности которого с помощью блока 6 оценивают величину и знак электрического зардца летательного аппарата. В простейшем случае, в качестве блока 6 может быть использован, например, миллиамперметр. По полученной таким образом оценке электрического заряда летательного аппарата определяют интенсивности и знаки полей электрического заряда летательного аппарата в каждой из контрольных точек. Для формирования вспомогательных (компенсирующих) полей используют блок 7 формирования управляющих напряжений, с помощью которого могут быть Получены управляющие напряжения необходимой величинБ и полярности. Сама операция формирования вспомогательных полей осуществляется в датчиках 1 поля, на неподвижные экраны которых подаются эти управляющие напряжения. Следовательно, на вход усилителей 2 поступают сигналы, являющиеся результатом алгебраического сложения естественньпс и вспомогательных электрических полей. Этим самым при компенсации мешающих полей обеспечивается устранение двух основных источников погрещностей: многопараметрич- ность расчетных соотнощений и нелинейные искажения в процессе усиления сигналов.
Определение составляющих неискаженного электростатического поля атмосферы с летательного аппарата может быть осуществлено путем замеров проинтегрированных сигналов из каждой контрольной точки с помощью измерителей 8, 9 и 10 составляющих Е,, Е, и Е, соответственно (фиг. 2).
В качестве указанных измерителей в простейшем случае- могут быть использованы, например, обычные -миллиамперметры и т.д. Отметим, что в качестве показателя достаточно полной компенсации в нашем случае выбрана оценка электрического заряда, получаемая с помощью блока 6, близкая к нулю.
Пусть в выбранньрс контрольных точках А, В, С и F (фиг. 1) установлены датчики измерителей электростатического поля атмосферы для измерения трех JO его ортогональных составляющих Е,, Ё Е, и собственного электрического заряда летательного аппарата Q. Тогда амплитуда напряжения на выходах датчиков определяется системой уравнений J5
-2
(1 - к: .к:). () if
(К; Ki)(1-||-;f|)
А
(3)
Если к неподвижному экрану датчиков А, В, С и F приложить постоянные напряжения, определяемые соотношениями
I
15
Un. iftQJ
ев K i +К 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки электрического состояния атмосферы с самолета | 1987 |
|
SU1483401A1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ ПОЛЕЙ В АТМОСФЕРЕ | 2014 |
|
RU2581419C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Способ определения параметров ожидаемого землетрясения | 2023 |
|
RU2839290C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2556286C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ ДО ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2260198C9 |
| Измеритель вектора напряжённости электрического поля, размещённый на беспилотном летательном аппарате | 2023 |
|
RU2810650C1 |
| СПОСОБ ПОЛЕТА ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2014 |
|
RU2544447C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБСЛЕДОВАНИЯ ОБЪЕКТОВ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ | 2012 |
|
RU2495375C1 |
Изобретение относится к электроизмерительной технике. Цель изобретения - з еличение точности измерений путем учета заряда летательного ап- . парата (ЛА). Производят оценку величины и знака ЛА. Снижают до миним. Зфовень мешающего поля эл. заряда ЛА в каждой из контрольных точек (КТ) его поверхности. При этом производят измерение составлякяцих вектора напряженности злектростатич. поля атмосферы по данным измерений в этих КТ. Снижение уровня мешающего поля зл. заряда ЛА в каждой из КТ осуществля-. ется методом компенсации мешающего поля с помощью вспомогательного эл. поля, к-тое формируют на основании оценки величины и знака эл. заряда ЛА, получаемой из суммы предварительно проинтегрированных сигналов из 2-х КТ. Контроль за достижением миним мешающего поля в КТ осуществляют по величине оценки эл. заряда ЛА, к-рая д.б. близкой к нулю. При достаточном снижении уровня мешающего поля устраняются нелинейные искажения в процессе усиления сигналов, когда уровень мешаюцего поля эл. заряда чрезмерно высок. Т. обр. устраняется один из основных источников погрешностей измерения составлякицих невозмущенного электростатич. поля атмосферы с ЛА. При более существенном снижении уровня мешающего поля, когда им можно пренебречь, устраняется и 2-й источник погрешности - много- параметричность расчетных соотношений, т.е. обеспечивается возможность измерений составляющих вектора напряженности электростатнч, поля атмосферы с ЛА непосредственно по данным измерений, проводимых в КТ его поверхности. 2 ил. с . вг& Ы
Ед Кд.р + К,Е
Е
Kl-Q - ,;
ЕС KC-Q +
Ер Kp-Q + .Е,;
где Кд, Кд KB, KgJ Kg, К, Kp t Кр- коэффициенты связи, зависящие от конфигурации проводящей поверхности летательного аппарата.
Согласно (1), учиташая операции
преобразования, усиления и детектирования, имеем дело не с самими полями Ед, ЕВ, ЕС и EF, а с напряжениями Uoftr, UOB , UDC и UOF на выходе измерительных каналов
UAO КА-ЕА;
,.E,; Uco КС-ЕС; Upo К.
где Кд, Kg, К(. и Кр - коэффициенты связи измерительных каналов А, В, С и F, учитьшающие изменения интенсив- ностей сигналов при выполнении операций их преобразования, усиления и детектирования.
Искомые величины Е
1
Е, И Q
определяются с помощью соотношений
Кс
С ТГ с
-- 1 П- к
(4)
(1)
К
20
W И Q
25
35
40
50
55
30
где 1д, Ig, 1, IP - константы датчиков, пропорциональные расстоянию между неподвижным экраном и измерительной пластиной, то вид соотношений (3) значительно упрощается
Е, пт г} Кр Кр
Ег -г -тг;(5)
KC Kj.
UA УВ
г.
5 г j-ir
Кд +Кц
Данное упрощение результатов измерений происходит вследствие того, что при подаче на неподвижтю экраны датчиков А, В, С и F напряжений, определяемых из формул (1), происходит компенсация электростатического поля, обусловленного зарядом Q летательного аппарата.
Предлагаемый способ измерения составляющих вектора напряженности невозмущенного электростатического поля атмосферы с летательного аппарата можно условно разбить на две стадии. На первой стадии производят оценку величины и знака электрического заряда летательного аппарата. На второй стадии снижают до минимума (в пределе - до нуля) уровень мешающего поля электрического заряда летательного аппарата в каждой из контрольных точек , его поверхности и при этом производят измерение составлякяцих вектора напряженности электростатического поля атмосферы непосредственно по
данным измерений в этих контрольных точках. Причем снижение уровня меша- кщего поля электрического заряда летательного аппарата в каяздой из контрольных точек осуществляется методом 1|:омпенсации мешающего поля с помощью : спомогательного электрического поля которое формируют на основании оцен- величины и знака электрического Наряда летательного аппарата, получаемой из суммы предварительно проинтегрированных сигналов из двух выбранных контрольных точек летательного аппара- а.При этом контроль за достижением нимума мешающего поля в каждой из онтрольных точек осуществляют по ве ичине оценки электрического заряда ле ательного аппарата, которая в этом чае должна быть близкой к нулю. При достаточном снижении уровня мешающего поля устраняются нелинейные искажения в процессе усиления сигналов, когда уровень мешающего поля электрического заряда чрезмерно . высокий.Таким образом,устраняется |один из основных источников погреш- |ностей измерений составляющих невоз- 1мущенного электрического поля атмо- I сферы с летательного аппарата. I При более существенном снижении уровня мешающего поля, когда им практически можно пренебречь по сравнению с уровнем измеряемого поля, устраняется и второй из основных источников погрешностей измерений - многопараметричность расчетных соотношений (3), т.е. обеспечивается возможность измерений составляющих вектора напряженности электростатического поля атмосферы с летательного аппарата непосредственно по данным измерений, производимых в отдельных контрольных точках его поверхности.
Существенное упрощение способа измерения, а также введение в качег стве показателя достижения достаточно полной компенсации мешающего поля действующего в контрольных точках летательного аппарата, оценки электрического заряда, близкой к нулю, позволяет при технической реализации способа сравнительно легко автоматизировать процесс измерения всех составляющих вектора напряженности электростатического поля атмосферы с летательного аппарата. С этой целью можно, например, применить цепь обратной связи, с помощью которой, ис
5
0
Q 5
пользуя электрический сигнал, кара- ктеризукиций оценку электрического заряда, в качестве управляющего, осуществить управление формируемыми вспомогательными полями в каждой из контрольных точек поверхности летательного аппарата.
Формула изобретения Способ измерения составляющих вектора напряженности невозмущенного электростатического поля атмосферы с летательного аппарата, включающий измерение напряженности поля в точках пересечения двух вертикальных продольной и поперечной нейтральных плоскостей с поверхностью летательного аппарата А и В соответственно, а также в точках пересечения вертикальных продольной и поперечной и горизонтальной нейтральных плоскостей с поверхностью летательного аппарата С и F соответственно посредством датчиков ротационного типа с измерительной и экранной пластинами и неподвижным экраном, соединенным с корпусом датчика, и вычисление заряда летательного аппарата по формуле
, 4UA.
и.
Q
)р- (1 + к;-к;)
Кв
v v
(v - -А
tK, +KB)U .„
)
отличающийся тем, что, с целью увеличения точности измерения путем учета заряда летательного аппарата, отсоединяют неподвижный экран датчиков от корпуса и подают на него постоянные напряжения соответственно равные
Кс
Kir
i icQ; v ii ipQ.
l
измеряют напряжения на выходах датчиков в точке А, В, С и F - U, Ug, U., Up соответственно и вычисляют значения составляющих вектора напряженности невозмущенного электрического поля по формулам
к - УЕ.. Е - Е - .
и; к; к;+к;
t
где Кд, KB, KC, Кр - аппаратные коэффициенты каналов датчиков в точках А, В, С и F соответственно, К, Kg, Кд, К , К., Кр - коэффициенты связи данного типа летательного айпарата.
UAO. UBO- напряжения, измеренные на ветственно при заземленном неподвиж- выходах каналов датчиков А и В соот- ном экране.
фиг. 2
| Имянитов И.М | |||
| Приборы и методы для изучения электричества атмосферы.- М.: Гостехиздат, 1957, с | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
| Техническое описание и инструкция по эксплуатации самолетного прибора для измерения напряженности электрического ПОЛЯ (СПНП) | |||
| ГГО | |||
| им | |||
| А.И | |||
| Воейкова, Л., 1979, | |||
