нМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель переходных характеристик электронных блоков | 1978 |
|
SU741194A1 |
| Устройство для автоматического измерения параметров амплитудно-частотной характеристики избирательного четырехполюсника | 1983 |
|
SU1087924A1 |
| Измеритель переходной характеристики четырехполюсника | 1984 |
|
SU1223168A1 |
| Устройство для допускового контроля амплитудно-частотной характеристики четырехполюсников | 1982 |
|
SU1101760A1 |
| Измеритель динамических параметров электронных устройств | 1982 |
|
SU1051471A1 |
| ИЗМЕРИТЕЛЬ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ ЧЕТЫРЕХПОЛЮСНИКА | 1973 |
|
SU378777A1 |
| Измеритель параметров импульсаВыХОдНОгО НАпРяжЕНия чЕТыРЕХпО-люСНиКА | 1977 |
|
SU796777A1 |
| Измеритель модуля и фазы коэффициента передачи четырехполюсника | 1984 |
|
SU1193602A1 |
| Способ измерения динамических характеристик преобразования быстродействующих и высокоточных аналого-цифровых преобразователей и устройство для его осуществления | 1984 |
|
SU1203699A1 |
| Устройство для измерения частотнозависимых электроакустических параметров | 1979 |
|
SU785793A1 |

Изобретение относится к области электроизмерительной техники и позволяет расширить область применения измерителя. Измеритель содержит пороговый элемент 2, переключаемый источник 3 опорных напряжений, блок 4 уп- равления и измеритель 5 информативного параметра. Введение генераторов 6 и 7 линейно изменяющегося напряжения и управляемой частоты расширяет диапазон измерения динамических параметров четырехполюсников. 4 ил.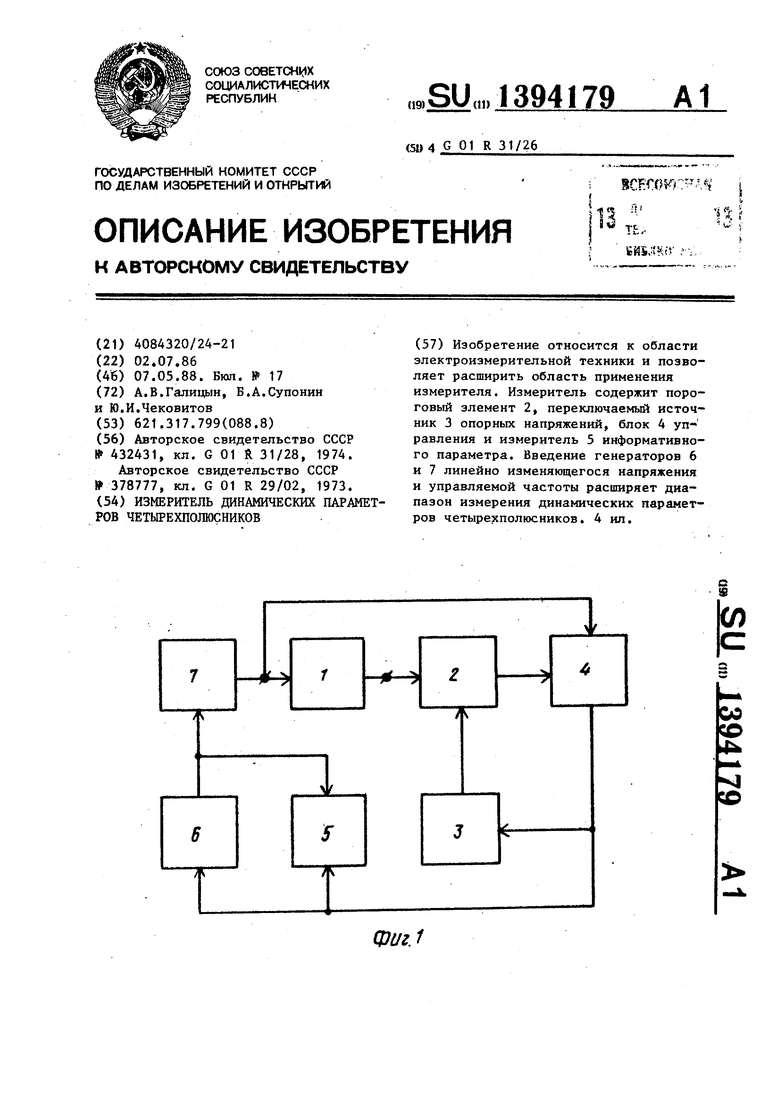
I
&0
со NU
sl
;D
.
Изобретение относится к электроизмерительной технике и может быть использовано для измерения динамических параметров различных четырехпо- люсников.
Целью изобретения является расширение области применения за счет расширения диапазона измерения динамических параметров четырехполюсников.
На фиг. 1 представлена структурная схема измерителя динамических параметров четырехполюсников; на фиг,2 - временные диаграммы его работы; на фиг. 3 - принципиальная схема блоков управления; на фиг. 4 временные диаграммы работы блока управления.
Измеритель динамических параметров четырехполюсников содержит клеммы для подключения входа и выхода испытуемого четырехполюсника 1, пороговый элемент 2, переключаемый источник 3 опорных напряжений, блок 4 управления, измеритель 5 информативного параметра, генератор 6 линейно изменяющегося напряжения, генератор 7 управляемой частоты.
Клемма для подключения выхода испытуемого четырехполюсника соединена с первым входом порогового элемента 2 выход которого соединен с первым входом блока 4 управления, выход которого соединен с первым входом измерителя 5 информативного параметра, входом управляемого генератора 6 ли- нейно изменяющегося напряжения и входом источника 3 опорн ых напряжений, выход которого соединен с вторым входом порогового элемента 2, причем выход генератора 6 линейно изменяющегося напряжения соединен с вторым входом измерителя 5 информативного параметра и входом генератора 7 управляемой частоты, выход которого соединен с клеммой для подключения входа испытуемого четырехполюсника 1 и вторым входом блока 4 управления.
Блок 4 управления содержит инвертор 8, D-триггер 9, элемент И 10, элемента ИЛИ 11, RS-триггер 12, первый 13 и второй 14 резисторы, первый 15 и второй 16 конденсаторы, диод 17 причем первый вход блока 4 соединен с первым входом элемента И 10 и D- входом D-триггера 9, С-вход которого соединен с выходом инвертора 8 и вторым входом элемента И 10, выход которого соединен с S-входом RS-триггера 12, R-вход которого соединен с выхо
0
5
0
5
0
дом элемента ИЛИ 11, первый вход которого соединен с катодом диода 17, первым выводом второго резистора 14 и первым выводом второго конденсатора 16, второй вывод которого соединен с инверсным выходом D-триггера 9, R-вход которого соединен с вторым входом элемента ИЛИ 11, первым выводом первого резистора 13 и первым выводом первого конденсатора 15, второй вывод которого соединен с шиной питания, вторые выводы первого 13 и второго 14 резисторов и анод диода 17 соединены с шиной Земля, вход инвертора 8 соединен с вторым входом блока 4, выход которого соединен с инверсным выходом RS-триггера 12.
Измеритель работает следующим образом.
В исходном состоянии напряжение на выходе переключаемого источника 3 опорных напряжений устанавливается равным большему из двух опорных напряжений, необходимых для испытания четырехполюсника. Сигналом с выхода блока 4 управления запускается управляемый генератор 6 линейно изменяющегося напряжения, выходное напряжение которого линейно возрастает.
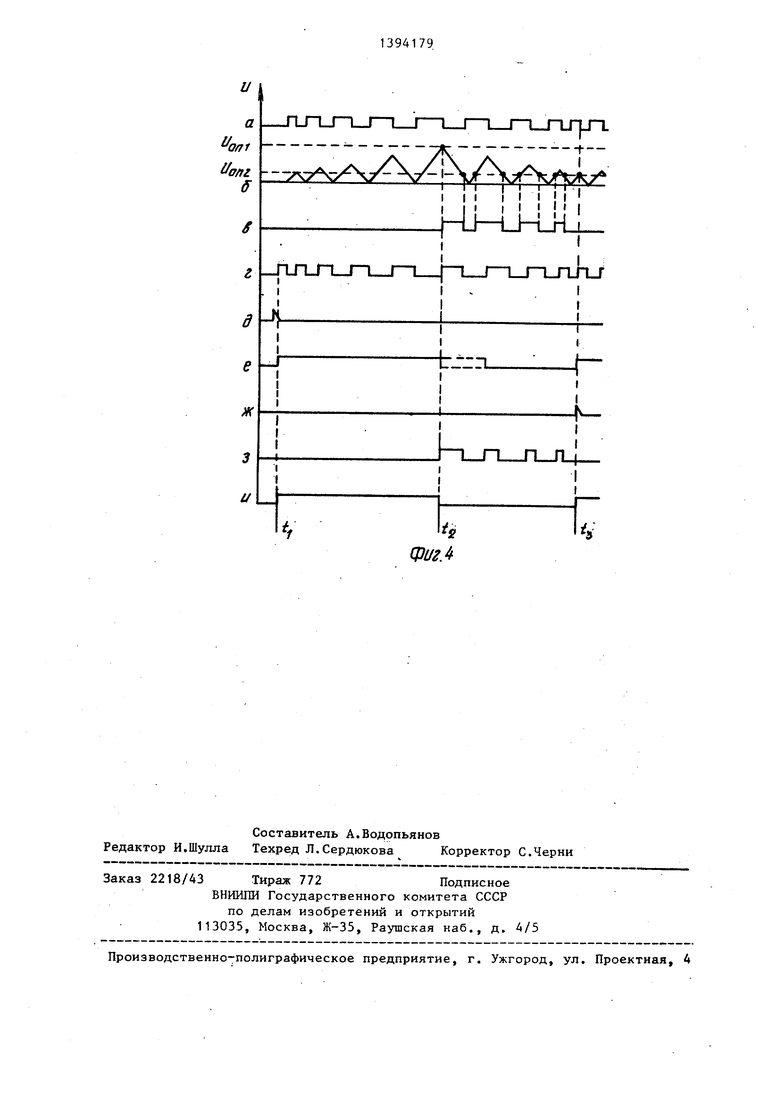
При этом длительность импульсов испытательного напряжения с выхода генератора 7 управляемой частоты и период их следования также -увеличи- . ваются пропорционально выходному напряжению генератора 6 линейно изменяющегося напряжения. При постоянстве амплитуды импульсов испытательного напряжения на входе испытуемого четырехполюсника 1 амплитуда вьпгодных сигналов его зависит от длительности воздействующего импульса. Поскольку в процессе измерения увеличивается длительность воздействующих сигналов, то ам1гпитуда импульсов напряжения на выходе испытуемого четырехполюсника 1 также возрастает, а в момент времени t| (фиг. 2&) достигает уровня , . При этом пороговый элемент 2 срабатывает, блок 4 управления выдает команду, по которой на выходе переключаемого источника 3 опорных напряжений устанавливается напряжение (фиг. 2), а выходное напряжение уп- равляемог о генератора 6 линейно изменяющегося напряжения начинает линейно уменьшаться (фиг. 2а), вследствие пего длительность импульсов испытательного напряжения также уменьшается (фиг. 25).
На участке линейного уменьшения выходного напряжения управляемого генератора 6 линейно изменяющегося напряжения выходное напряжение испытуемого четырехполюсника 1 неоднократно (при каждом очередном воздействии испытательным напряжением) превышает значение U - напряжение на выходе управляемого источника 3 опорных напряжений. При этом каждый раз, ког вмя
да выполняется условие U, пороговый элемент срабатывает. Поэто- му блок 4 управления построен так, что при работе в интервале времени , выдает сигнал на вход управляемого генератора 6 линейно изменяющегося напряжения только в том случае, когда выходное напряжение испытуемого четырехполюсника 1 в течение всего времени воздействия импульса испыта
тельного напряжения меньше U
соблюдается условие
Ueb,,
042
т.е
on г
(фиг. 7.1,), При этом блок 4 управления вьщает очередную команду, по которой на выходе переключаемого источника 3 опорных напряжений устанавливается опорное напряжение U, (фиг. 26), а выходное напряжение управляемого генератора 6 линейно изменяющегося напряжения начинает линейно увеличиваться (фиг. 2а). На участке линейного увеличения выходного напряжения генератора 6 линейно изменяющегося напряжения (при большем значении U ) блок 4 управления выдает сигнал при условии Ug,,U . При соблюдении этого условия блок 4 управления вновь выдает команду уп- i равления и все указанные процессы повторяются. В предлагаемом измерителе выходное напряжение управляемого генератора 6 линейно изменяющегося напряжения U, (в момент времени t) количественно характеризует значение фронта выходного напряжения (t.) испытуемого четырехполюсника 1 от начала воздействия до момента сравнения с опорным напряжением U, и связано с ним соотношением , , где К - коэффициент преобразования измерите-
ля 5, а напряжение Ug. (в момент времени t,) равно К/1
х-г
где tx2, - значение фронта выходного напряжения испытуемого четырехполюсника 1 от начала воздействия до сравнения с опорным напряжением . Разность этих зна
4179
чений количественно характеризует длительность фронта 5 (фиг. .2В), заключенного между двумя этими опорными f. напряжениями U,(ty, )К Г.
15 20
Поскольку изменение выходного напряжения управляемого генератора 6 линейно изменяющегося напряжения линейно во времени, а скорость измене10 ния постоянна как при увеличении, так и при уменьшении напряжения, то интервал времени Т (фиг. 2 В) с выхода блока 4 управления так же, как и разность напряжения , количественно характеризует значение . В предлагаемом измерителе относительная погрешность измерения G определяется из соотношения G 8 Т /К-ty, где S const - скорость изменения выходного напряжения управляемого генератора 6 линейно изменяющегося напряжения; Т - период следования импульсов генератора 7 управляемой частоты; K const - коэффициент преобразования
25 измерителя 5, имеющий размерность
ф;
t., - измеряемый динамический
параметр четырехполюсника. Здесь постоянно и Tj., следовательно, 30 G также постоянна как при измерении малых, так и больших значений t и не накладывает каких-либо ограничений на диапазон измерения измерителя.
35
Формула изобретения
40
Измеритель динамических параметров четырехполюсников, содержащий клеммы для подключения входа и выхода испытуемого четьфехполюсника, клемма для подключения выхода испытуемого четырехполюсника соединена с первым входом порогового элемента, второй вггод которого соединен с выходами 45 переключаемого источника опорных напряжений, а выход - с первым входом блока управления, выход которого соединен с входом переключаемого источника опорных напряжений и с первым входом измерителя информативного параметра, отличающийся тем, что, с целью расширения области применения за счет расширения динамического диапазона измерения, в него введены генератор линейно изменяюще гося напряжения и генератор управляемой частоты, выход которого соединен с клеммой для подключения входа испытуемого четырехполюсника и с вторым
50
55
иг 2
и
Фиг А
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ МИКРОСХЕМ | 1972 |
|
SU432431A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ИЗМЕРИТЕЛЬ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ ЧЕТЫРЕХПОЛЮСНИКА | 0 |
|
SU378777A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
