(Л
Изобретение относится к области измерений, в частности динамических измерений свойств потоков газов и жидкостей в трубопроводах,
Целью изобретения является повышение точности и расширение функциональных возможностей за счет измерения также и скорости ультразвука.
На чертеже показана структурная схема ультразвукового устройства определения свойств движущейся среды.
Ультразвуковое устройство для определения свойств движущейся среды содержит два излучающих 1,2 и два приемных 3,4 пьезопреобразователя с подключенньми к ним первым 5 и вторым 6 усилителями, выходы которых соединены с информационными входами преобразователя 7 временной интер- вал - цифра, синхронизатор 8, соединенный с управляющими входами усилителей 5,6 и преобразователя 7, блок 9 вычисления обратных величин, соединенный двумя выходами с сумматором- вычитателем 10, а двумя входами - с выходами регистров II и 12, регистр
13,подключенный выходом к сумматору
14,второй вход которого соединен с выходом регистра 11„ выход с преоб- разователем 15 цифра - временный интервал, подключенньП выходом к управляющему входу регистра 12 и второму управляющему входу регистра 11 решающее устройство:16 соединенное входом с выходом усилителя 6, а вы- ходом с первым управляющим входом регистра 11 и управляющим входом регистра 13, причем информационные выходы преобразователя 7 соединены
с информационными входами регистров 11, 12 и 13, а выходами устройства являются два выхода сумматора-вычи- тателя 10 и сумматора 14.
Устройство работает следующим об- разом.
В среду, характеризуемую скоростью ультразвука С и скоростью движения V(t), в моменты времени ti Т П, где Т - период зондирования п. -- порядковый номер излучаемого импульса, пьезопреобразователи 1, 2 посылают зондирующие сигналы в противоположных направл ениях. Причем длительность акустического .сигнала меньше времени распространения l/C,, где 1 - расстояние между передающим 1,2 и приемными 3,4 пьезопреобразо
вателями, а Ср средняя скорость звука в среде.
Усилителями 5,6 зондирующие сигналы представляются в виде точечных
(дельта-образных) импульсов, поступающих на входы преобразователя 7 временной интервал - цифровая величина и решающего блока 16,
Таким образом, на выходе усилителей 5,6 имеются две временные по.сле- довательности оценок времени прохода в зависимости от моментов времени
(Г () (), причем
() Т. i tV, (1)
Q
5
0
f-(-) . (-) . . г- (-) t (t ) Т 1 -f-t ,
i) о (
(2)
где L; , L i-e время прохода
при зондировании соответственно по и против направления скорости V(t).
Последовательность импульсов запуска приемопередачиков 5, 6 в моменты времени Т-п задается с помощью синхронизатора 8.
Преобразователем 7 типа временной интервал - цифровая величина время прохода , IL и моменты излучения сигнала t Т П- преобразуются в цифровые величины соответственно N ,
W I- М
с . (+; i-j
Далее величины N , N и N. записываются соответственно в регистры 11, 12 и 13 импульсом, выдаваемым блоком 7 после завершения преобразования i-x временных величин в цифровые.
В каждом i-M цикле зондирования решающий блок 16 работает по алгоритму, реализующему выражение ,.
Ъ-ь/ / 3) где 6 - порог обнаружения начального и конечного моментов переходного процесса в канале, образуемого при зондировании против направления скорости V(t) , Разность - определяет вычитатель 1ба, Значение € записано заранее в устройство памяти 16а блока 16, Ее значение установлено исходя из априорных сведений о наименьшем значении скорости V(t), Когда условие (3) выполняется, пороговое устройство 16 принимает гипотезу об отсутствии в интервале времени ft., , t. скачка скорости V(t) ,
31396041
При условии, (; , причем , пороговое устройство 166 принимает гипотезу о наличии скачка скорости в интервале времени tj,. t ,
При условии, ) , причем , пороговое устройство 166 принимает гипотезу об окончании переходного процесса в
с г;,. t,
интервале времени
В случае, когда sinyl меняет свое значение, формирователь импульсов 16г выдает импульсы, интервал времени между которыми характеризует длительность Т переходного процесса в ка- нале, образуемого при зондировании против направления скорости V(t). При этом формирователь имйульса 16г работает по алгоритму, реализующему выражение
(-(
Г- « - ГД
(4)
причем j 1,
(-5
момент времени окончания пере. ходного процесса; t - начальный момент времени возникновения переходного процесса:
Таким образом, на выходе решающего блока 16 имеется импульс, характеризующий длительность и момент времени окончания переходного процессам
-1
начинается
В момент времени работа в режиме считьшания со- .держимых регистров 11 и 13, которые далее сумматором 14 суммируются согласно выражению
Nui
+ N.
(5)
Цифровая величина А преобразователем 15 преобразуется в импульс, выдаваемый в момент времени & , причем
А.
Ю
0.
()
+ t.
(tr)
где
- длительность переходного процесса в канале, образуемого зондированием против направления скорости V(t)
В моменты времени fi j считывается содержимое регистра .12.
После вычислительных процедур бло нами 9 и 10, реализующими выражения
(7)
{«.(.. ./-IT-
(М (в.)} (,
I- J С (f-1 -) 1
N N;
(8)
10
15
50
gg
на выходе схемы имеются две последовательности цифровых величин, скорость ультразвука и скорость движения среды..
Сумматор 14 выдает значения временных отметок Q- .
с
-Таким образом, в предложенном техническом решении осуществляется взаимная синхронизация в соответствии с моментами времени выдачи результата измерения и моментами времени принятия зондирующих сигналов при проходе ими в направлении скорости V(t), когда период зондирования . Такие измерительные проце20 дуры способствуют уменьшению динамической погрешности, что доказывает проведенное экспериментальное исследование с привлечением численных методов .
25
Формула изобретения
Ультразвуковое устройство для определения свойств движущейся среды, содержащее два излучающих ji два приемных
30 пьезопреобразователя, подключенные к ним соответственно первый и второй усилители, преобразователь временной интервал - цифра, синхронизатор, сое- дикенный с управляющими входами уси, 35 лителей и входом преобразователя временной интервал - цифра, два других входа которого связаны с выходами усилителей, блок вычисления обратных величин и связанный с ним сумма40 тор-вычитатель, отличающееся тем, что, с целью повышения точности и расширения функциональных возможностей за счет измерения также и скорости ультразвука, оно снабжено
45 тремя регистрами, информаци онные входы которых соединены с соответствую- . щими выходами преобразователя временной интервал - цифра, решающим блоком, подключенным входом к выходу второго усилителя, а выходом - к управляющему входу третьего регистра и первому управляющему входу первого регистра, последовательно соединенными сумматором, первьм вход которого подключен к выходу третьего регистра, и преобразователем цифра - интервал времени, выход которого связан с управляющим входом второго регистра и вторым управляющим входом
-51396041«
перйого регистра, подключенного выхо- сумматора, а выход второго регистра дом в первому входу блока вычисления соединен с вторьм входом блока вычис- обратных величин и второму входу ления обратных величин.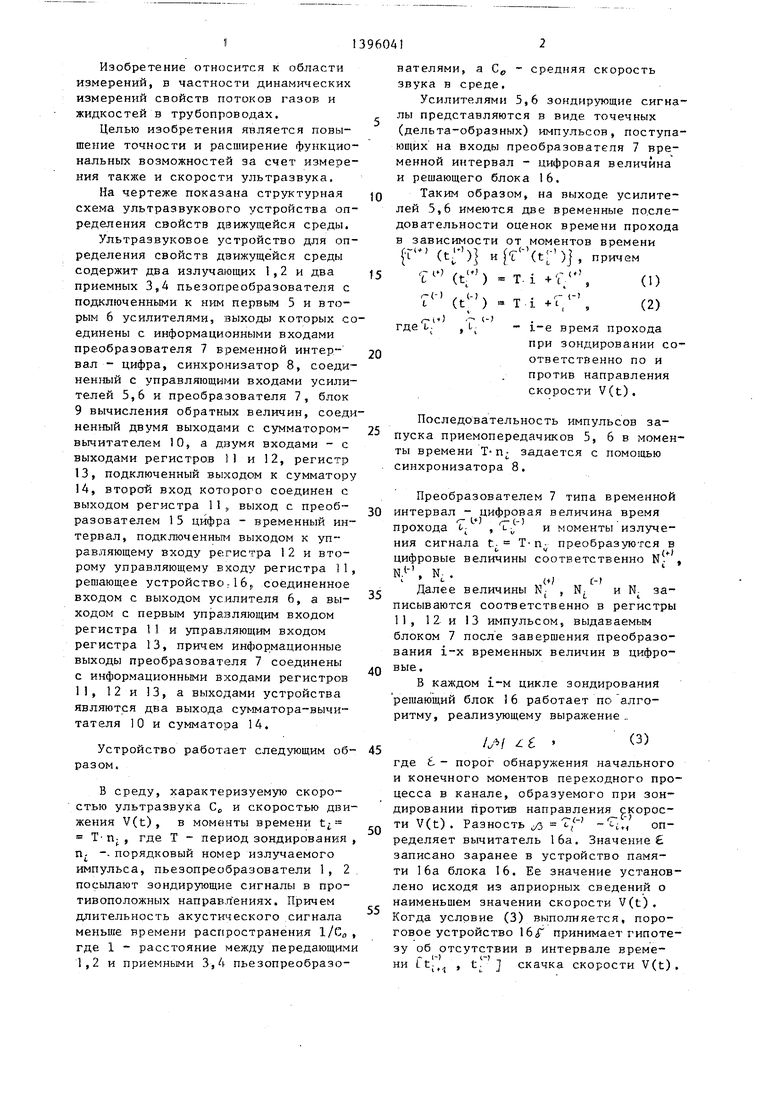

| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковое устройство для определения свойств движущейся среды | 1987 |
|
SU1472815A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ УЛЬТРАЗВУКА В УГЛЕРОДНЫХ ЖГУТАХ И НИТЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2281464C2 |
| Ультразвуковой измеритель флуктуацийСКОРОСТи пОТОКА | 1979 |
|
SU838575A1 |
| Ультразвуковой измеритель пульсирующих скоростей потока | 1983 |
|
SU1081544A1 |
| Ультразвуковой измеритель пульсирующих скоростей потока | 1988 |
|
SU1644039A2 |
| Двухканальный ультразвуковой измеритель скорости потока | 1979 |
|
SU788001A1 |
| Безэталонный ультразвуковой толщиномер (его варианты) | 1982 |
|
SU1064130A1 |
| Способ измерения времени установления переходных процессов четырехполюсников | 1982 |
|
SU1084704A1 |
| Способ измерения скорости распространения акустических колебаний в движущихся средах | 1986 |
|
SU1434361A1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
Изобретение относится к измерению динамических свойств движущихся сред ультразвуковым методом. Целью изобретения является повышение точности и расширение функциональных возможностей за счет измерения также и скорости звука. Пьезопреобразователя- ми 1,2,3,4 прозвуг1ивается исследуемая среда в противоположных направлениях. Принимаемые последовательности-импульсов усиливаются, преобразуются в цифровые величиньк Вычисление скоростей ультразвука и движения среды проводится с использованием в качестве. временных отметок последовательности импульсов одного из акустических каналов . На выходе сумматора-вычитате- ля 10 получают искомые величины, а на выходе сумматора 14 - числовые значения временных отметок измерений , 1 ил. с S
| Ультразвуковой измеритель флуктуацийСКОРОСТи пОТОКА | 1979 |
|
SU838575A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
