Изобретение относится к измерительной технике, а более конкретно к устройствам исследования гидрофизических полей, турбулентных процессов и других свойств водной среды.
Одним из важнейших путей совершенствования исследований в океане является переход от пассивного сбора информации к постановке целенаправленного эксперимента в темпе временной изменчивости исследуемых процессов.
Известно устройство дпя автоматического контроля концентрации электролитов, содержащее измеритель электропроводности, к выходу которого подключены последовательно соединенные множительное устройство, интегратор и ячейка памяти, причем интегратор и ячейка памяти соединены с первым выходом блока управления, второй выход которого подключен к нагревателю, измеритель температуры, выход которого подключен ко входу блока управления и через дифференциатор к множительному устройству Это устройство измеряет интегральное значение произведения электропроводности на скорость изменения температуры электролита, по
величине которого и судят о концентрации раствора
Недостатками устройства являются сложность и трудоемкость процесса определения концентрации из-за взятия пробы раствора объемом, соответствующим объему измерительной ячейки и обязательного нагрева в достаточно большом интервале температур, что существенно снижает оперативность процесса измерения и не позволяет использовать устройство для непрерывного контроля концентрации в произвольном объеме жидкости.
Наиболее близким по совокупности признаков к предлагаемому устройству является гидрофизическим зондирующий комплекс Исток-3, предназначенный для получения профилей распределения температуры и удепьной электропроводности по глубине с дрейфующего судна и состоящий из погружаемого и бортового устройств, соединенных кабель-тросом, Исток-3 обеспечивает одновременную регистрацию следующих параметров: температуры от -2 до +35°С с погрешностью ± О 03 JC и чувствительностью 0,01 ± 0,005°С с инерционностью 1,0 с, электропроводности от 13 до
1
ч
68 мсм/см с погрешностью ± 0,03 мсм/см и чувствительностью 0,01 ± 0 005 мсм/см, давления от 0 до 200 кгс/см2 с погрешностью 0,5 кгс/см2 и чувствительностью 0,1± 0,05 кгс/см2 Время измерения всех параметров 1,6 с
Внутри опускаемого герметического контейнера размещены измерительные мосты, аналого-цифровой преобразователь, устройство управления и синхронизации, блок связи с бортовым устройством и блок питания. Бортовая аппаратура содержит блок связи с погружаемым устройством, блок синхронизации приемного регистратора, четыре регистра памяти, цифроаналого- вый преобразователь, блок связи с регистрирующими устройствами и устройство индикации
Бортовое устройство служит для преобразования измеряемых океанофа фических элементов и их регистрации в аналоговом и цифровой форме. По окончании зондирования производится перезапись исходных данных на магнитную ленту По этим массивам ЦВМ производит контроль грубых сбоеа отдельных отчетов; коррекцию постоянной времени термометра сопротивления; интерполяцию данных к одному моменту времени; вычисление солености, плотности, скорости звука и т д
При проведении гидрофизических исследований очень важно получение экспресс-информации о распределении солености, плотности и т д в реальном масштабе времени В районе термоклина, особенно при высоких скоростях зондирования, из-за несоответствия динамических характеристик каналов температуры и электропроводности получаются большие дина- мические погрешности вычисления солености, как косвенного параметра Т и Е Эта погрешность в прототипе корректируется по окончании зондирования с учетом известной постоянной времени датчика температуры. Поскольку постоянная времени датчика изменяется в процессе его эксплуатации, то указанная динамическая погрешность определения солености компенсируется не полностью
Недостатками прототипа являются отсутствие возможности определения солености в реальном масштабе времени и недостаточная точность вычислений обусловленная динамической погрешностью канала температуры
Цель изобретения повышение скорости зондирования водной среды
Поставленная цель достигается тем «то известный морской зондирующий гидрофизический комплекс, содержащий погружаемое устройство с установленными в нем датчиками температуры, давления и электропроводности, выходы которых через усилители подключены ко входу коммутатора, а вход коммутатора через аналого-цифровой преобразователь и зондовый приемопередатчик соединен двунаправленной связью с бортовым устройством, включающим бортовой приемопередатчик и блок индикации, снабжен дополнительным датчиком температуры установленным на корпусе погружаемого контейнера, дифференциально включенным совместно с основным датчиком к входу дополнительного усилителя, выход которого подключен к входу коммутатора, а в бортовое устройство введены оперативное запоминающее устройство, мультиплексор, вычислитель солености, три
регистра, два сумматора, масштабный множитель, вычитающий элемент и блок управления Причем входы первого и второго регистров и первые входы мультиплексора, первого сумматора, вычитающего элемента
и вычислителя солености через оперативное запоминающее устройство соединены с выходом бортового приемопередатчика, выходы первого и второго регистров соединены с вторыми входами первого сумматора и
вычитающего элемента соответственно, выходы которых соединены с первым и вторым входами масштабного множителя, выход которого соединен с первым входом второго сумматора, выход которого соединен с вторым входом мультиплексора, выход которого через третий регистр соединен с вторыми входами второго сумматора и вычислителя солености, выход которого соединен с входом блока индикации. Выходы блока управления соединены с синхронизирующими входами всех структурных элементов бортового устройства. Дополнительный датчик температуры установлен с возможностью перемещения его по штоку относительно
группы основных датчиков на величину требуемой градиентометрической базы в направлении зондирования
Динамическая погрешность измерительного канала пропорциональна постоянной времени измерителя г, градиенту измеряемой величины grad Т и скорости зондирования (измерения) V, иными словами
(5 Tgradt V
Таким образом, в районе термоклина, где градиент температуры достигает 1°С/м, для снижения динамической погрешности
инерционного датчика необходимо уменьшать скорость зондирования (частоту опроса датчика),
Устройство позволяет повысить скорость зондирования при заданной динамической погрешности, используя измерения градиента температуры для коррекции данных температурного поля.
Для определения градиента температуры необходимо наличие двух датчиков, расположенных на заданном расстояние и дифференциально связанных друг с другом.
Допустим эти датчики имеют разные постоянные времени переходного процесса, тогда
-Л.
(5i n grad t-V;
-
.02 тг grad t.V.
Динамическая погрешность измерения градиента величины Т будет соответственно равна
dgrad 3l - 62 - grad t V( П - Г2 ),
т.е. меньше, чем динамическая погрешность измерения с помощью этих датчиков параметра Т. Например, если постоянная времени датчиков температуры отличается на 20%, тогда динамическая погрешность измерения градиента уменьшится в 5 раз, либо при ззданной динамической погрешности возможно увеличение скорости зондирования приблизительно в 5 раз.
Таким образом, устройство позволяет производить вычисление солености с большой точностью в реальном масштабе времени, увеличить скорость зондирования при проведении экспериментов, что равносильно увеличению частоты опроса первичных преобразователей, а значит позволяет получить больше данных о тонкой структуре гидрофизических полей океана, т.е. более точно представить картину профилей гидрофизических параметров водной среды.
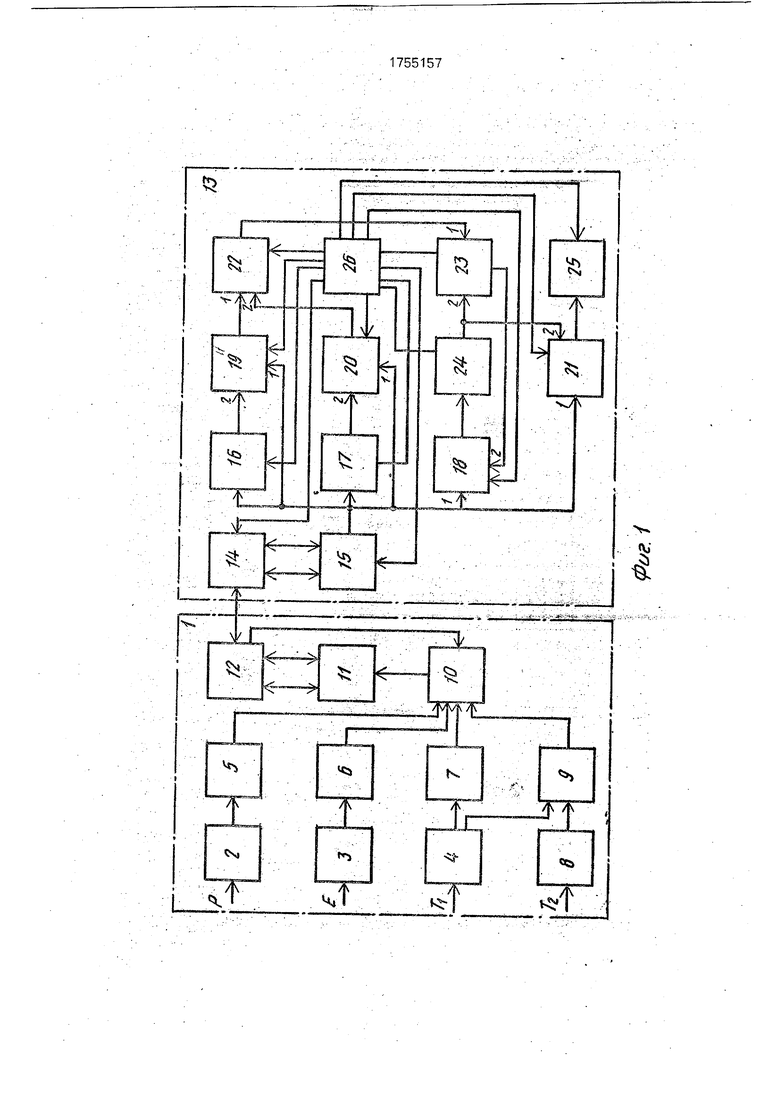
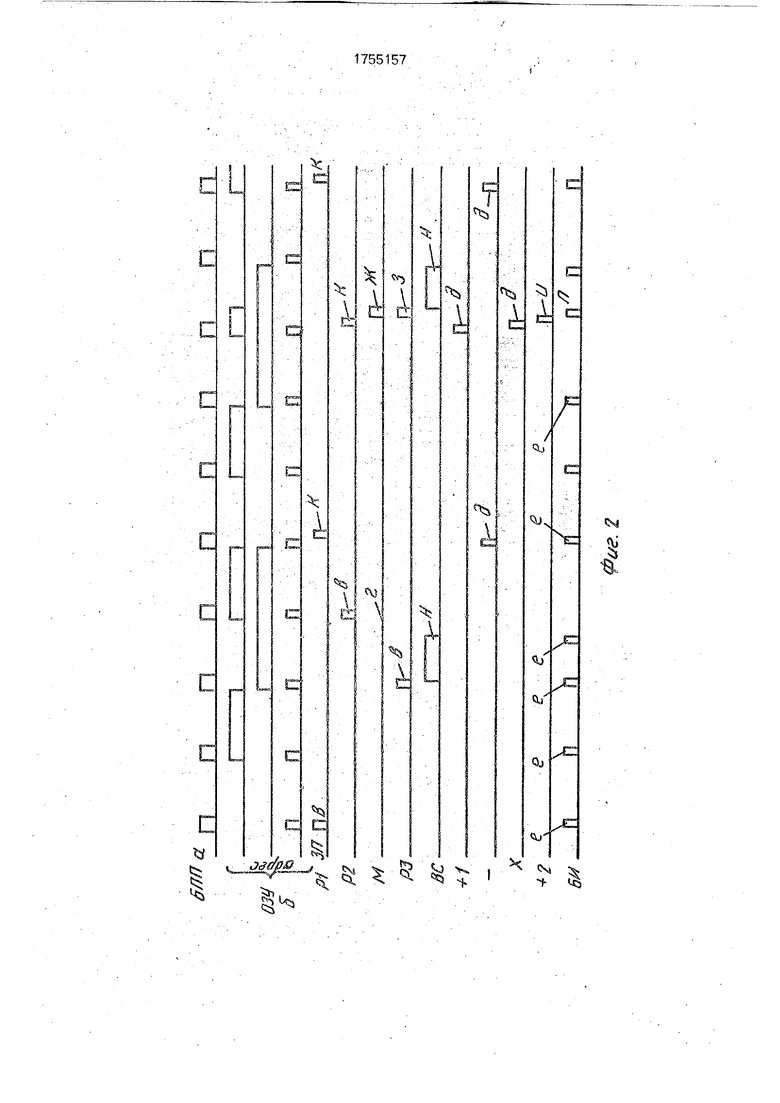
На фиг, 1 дана структурная схема предлагаемого устройства для определения распределения солености воды; на фиг. 2 - временные диаграммы функционирования устройства; на фиг. 3 - структурная схема вычислителя солености; на фиг, 4 - временные диаграммы функционирования вычислителя солености; на фиг 5 - электрическая схема блока умножения.
Сущность изобретения заключается в следующем. При вертикальном исследовании водной среды измеряются следующие параметры: температура Т, электропроводность Е,давление Ри градиент температуры grad Т. Обычно определение солености выполняется по зависимостям, связывающим этот показатель с температурой, электро- проводностью и давлением, например, по полиномам типа
5 § I Ј aIJk-T «JPk
i - П I Л I, П
1-0 k 0
(D
где aijk - коэффициент полинома.
В предлагаемом устройстве предварительно выполняется коррекция данных тем- пературы с использованием измерений градиента температуры по формуле:
АТ (grad Т( -1 + grad TI)(H| - HI - Q
ДТ -.
- (2)
где TI-I - значение температуры на предыдущем шаге измерений;
Hj-i. HI показания датчика давления на предыдущем и текущем шагах измерений
соответственно;
grad Ти, grad TI - показания градиентометра температуры на предыдущем и текущем шагах измерений соответственно;
расстояние в местах между двумя
датчиками температуры, служащим для измерения grad Т.
Вычисление солености осуществляется с использованием откорректированного значения температуры,
В структурную схему устройства для определения распределения солености воды по глубине (фиг. 1) входят погружаемое устройство 1, включающее датчик давления 2, датчик электропроводности 3, основной
датчик температуры 4, выходы которых соединены со входами соответствующих измерительно-усилительных блоков 5-7, дополнительный датчик температуры 8, включенный дифференциально с соответствующим датчиком к входу дополнительного усилительно-измерительного блока 9. Выходы усилительно-измерительных блоков 5-7 и 9 соединены с входами аналогового многоканального коммутатора 10, выход
которого через аналого-цифровой преобразователь 11 и зондовый приемопередатчик 12 соединен двунаправленной связью с бортовым устройством 13.
Бортовое устройство 13 включает бортовой приемопередатчик 14, выход которого через оперативное запоминающее устройство 15 подключен ко входам первого 16 и второго 17 регистров, к первым входам мультиплексора 18, первого сумматора 19, вычитающего элемента 20 и вычислителя солености 21 Выходы первого 16 и второго 17 регистров соединены с вторыми входами первого сумматора 19. и вычитающего элемента 20 соответственно, выходы которых соответственно соединены с первым и вторым входами масштабного множителя 22, выход которого соединен с первым входом второго сумматора 23. Выход второго сумматора 23 соединен с вторым входом мультиплексора 18, выход которого через третий регистр 24 соединен с вторыми входами второго сумматора 23 и вычислителя солености 21, выход которого соединен с входом блока индикации 25 Выходы блока управления 26 соединены с синхронизирующими входами бортового приемопередатчика 14, оперативного запоминающего устройства 15, регистров 16, 17 и 24, мультиплексора 18, сумматоров 19 и 23, вычитающего элемента 20, вычислителя солености 21, множителя 22 и блока индикации 25
На фиг 2 приведены временные диаграммы функционирования устройства Устройство функционирует следующим образом На вход коммутатора 10 поступают (Элоговые сигналы с основных (2-7) и градиентометрического 8-9 каналов. Аналоговые значения градиента получаются за счет дифференциального включения двух одинаковых датчиков Коммутация напряжений на аналого-цифровой преобразователь 11 происходит по синхроимпульсам (фиг 2а), поступающим из бортового устройства 13 через зондооый приемопередатчик 12. АЦП преобразует напряжение в соответствующий двоичный последовательный код, который передается зондовым приемопередатчиком в виде частотно-модулированных сигналов
Бортовой приемопередатчик 14 принимает информацию, преобразует ее в двоичный параллельный коп, и одновременно передает в погружаемое устройство синхронизирующий сигнал от блока управления 26. Полученная информация по синхроимпульсам от блока управления 26 записывается в оперативное запоминающее устройство 15 (фиг. 26) Вначале зондирования информация от датчиков давления 2, температуры А и градиентометра 4-8 наряду с записью в оперативное запоминающее устройство 15 записывается во второй 17, третий 24 и первый 16 регистры соответственно (фиг. 2в), при этом на управляющем входе мультиплексора 18 установлен сигнал низкого уровня (фиг 2г) Таким образом, в регистрах сохраняются значения параметров, измеренных на предыдущем шаг зондирования- в Р1 grad Ti 1, в Р2 - Ни, в РЗ -Ti 1.
Далее в каждом цикле опроса датчиков происходит корректировка значений температуры по формуле 2, для чего на первый сумматор 19, вычитающий элемент 20 и масштабный множитель22 из блокауправления 26 выдаются запускающие импульсы (фиг. 2д). Масштабный множитель умножителя 22 устанавливается равным 1/2 . (Значение градиентометрической базы Ад выбирается из учета достаточного соотношения полезный сигнал - шум и соответствует 0,1-1 м). Второй сумматор 23 завершает операцию корректирования температуры (фиг. 2и), значение которой через мультиплексор
18, на управляющем входе которого уста- навлизлется сигнал высокого уровня (фиг 2ж), записывается в третий регистр 24 (фиг. 2з) и поступает на второй вход вычислителя солености 21, текущее значение глубины HI
и градиента температуры grad TI заносится соответственно во второй 17 и в первый 16 регистры после выполнения операций первым сумматором 19 и вычитающим элементом 20 (фиг. 2к),
Через выходной мультиплексор вычислителя солености 21 выводятся коды давления, температуры, электропроводности и солености на блок индикации 25, синхронизируемый блоком управления 26 (фиг 2л).
Устройство позволяет также выводить на блок индикации 26 откорректированное значение температуры (фи-, 2м).
Пример реализации устройства, В комплексе используются стандартные датчики
следующих типов: датчик температуры представляет собой термометр сопротивления, датчик давления мембранный тензо- метрчческий; датчик электропроводности кондуктометрический или контактный.
В качестве усилителя могут быть использованы серийные интегральные операционные усилители, например, серий К140, К284, К544 ц др , а в качестве коммутатора и АЦП - интегральные схемы серий К543,
К590, К 572, К1108.
Оперативное запоминающее устройство может быть организовано на интегральных микросхемах К155РУ2, К565РУЗ; в качестве регистров можно использовать интегральные микросхемы К155ИР1, мультиплексора - К531КП2, К531КП11.
Функции блока индикации можег выполнять, например, цифровой вольтметр или дисплей
Для вычисления солености морской среды в процессе зондирования удобно воспользоваться степенным многочленом, разработанным по методике Брамсона М А
S- J Ј ay-T /c ,aij 0, i o j o
если i + j 4.
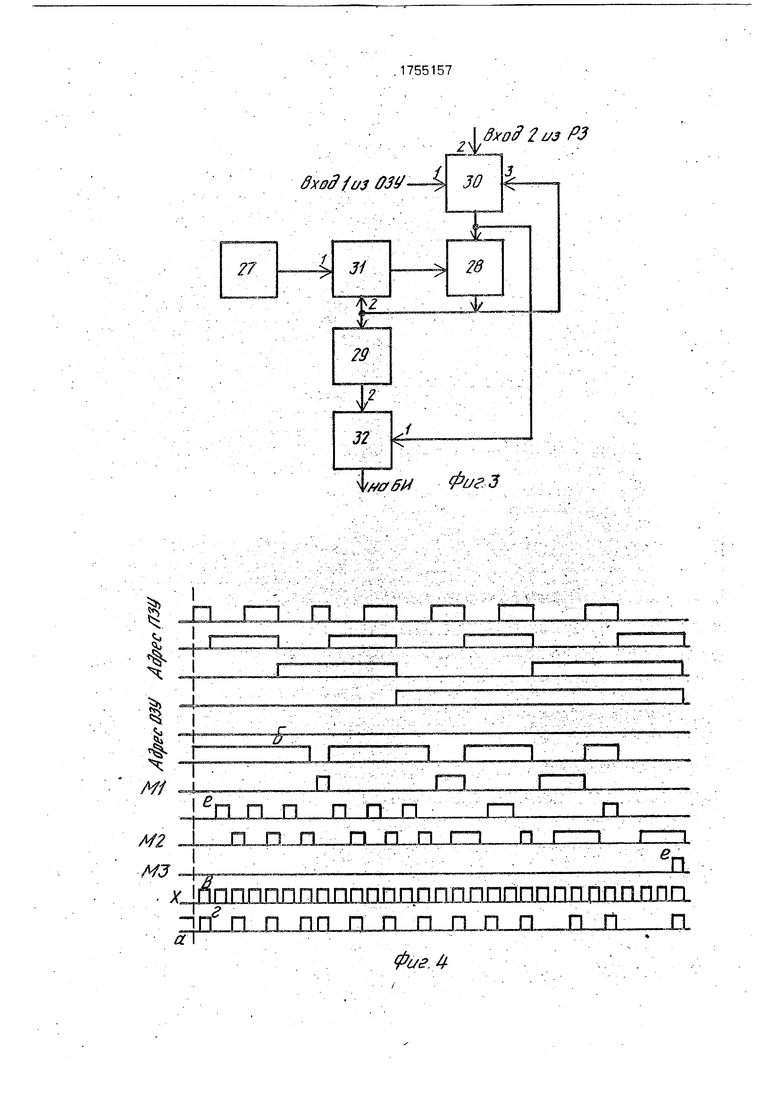
Структурная схема вычисления солености, реализующая данный алгоритм, приведена на фиг. 3, на фиг, 4 приведены временные диаграммы функционирования данного структурного блока.
В ПЗУ 27 (см. фиг. 3) занесены коды коэффициентов полинома для вычисления солености S в такой последовательности:
аоо, aoi,
ао2 аоз
ао4
aoi ао2 аоз
а ю ,
аи ai2
аю аи
и т.д.
Когда выполнен ввод информации от всех датчиков и коды данных с этих датчиков занесены в ОЗУ 15, блок управления 26 выдает серию импульсов для управления работой вычислителя 21 (см. фиг. 2н).
В качестве множительного устройства
28можно использовать микросхему К155ИПЗ, выход которой соединен с регистром К155ИР1, используемым для хранения результата. Если на управляющие входы S1 - S3 этой микросхемы постоянно подан сигнал низкого уровня, тогда изменение сигнала на входе SO позволит выполнять две операции: передачу первого операнда без изменений на выход микросхемы и перемножение двух величин. Накапливающий сумматор 29 представляет собой сумматор типа К155ИМ, выход которого соединен с входом регистра, например, К155ИР1, запись в который осуществляется от блока управления 26.
Процесс вычисления солености начинается с занесения в регистр накапливающего сумматора 29 кода коэффициента, для чего на ПЗУ 27 выдается адрес этого коэффициента, на управляющий вход множителя 28 подается сигнал низкого уровня, а на управляющий вход накапливающего сумматора
29подается импульс управления (фиг. 4а). Затем на ОЗУ 15 из блока управления выдается адрес параметров Е, электропроводность (фиг. 46), а на ПЗУ 27 - адрес следующего коэффициента. Через первый
30и второй 31 мультиплексоры данные поступают на входные шины множительного устройства 28, а на управляющий вход - сигнал высокого уровня (фиг 4в) Результат поступает на сумматор 29 (фиг 4г)
На следующем шаге из ПЗУ 27 извпека- ется следующий коэффициент. Для получения степеней выше первой, например, Е мультиплексор М2 31 переключается на
прием информации по второму входу (фиг. 4д), т.е. на второй вход множителя 28 поступает результат предыдущей операции, а на первом входе установлено то же значение, например, Е. После завершения расчетов
0 полученные и исходные данные выдаются на блок индикации 25 через третий мультиплексор 32, на который из блока управления 26 поступают соответствующие управляющие сигналы (фиг. 4е).
5 Блок управления 26 может быть реализован на микропроцессорной базе. Рассмотрим наиболее простую реализацию, например, на базе однокристалльного микропроцессора К1816 (РВЕ035). Прииципи0 альная схема такого устройства приведена з техническом паспорте микросхемы РВЕ035.
Кристалл микросхемы содержит практически все узлы, необходимые для автоном5 ной работы, за исключением ПЗУ команд, поэтому принципиальная схема устройства помимо основного микропроцессора вкяю- чает микросхему внешнего ПЗУ К573РФ2 емкостью 2К восьмиразрядных слое и вось0 миразрядный буферный регистр обмена,
Для управления предлагаемым зондирующим устройством требуется порядка 23 сигналов. Поэтому для выполнения поставленной задачи в микропроцессорный бпок
5 управления добавляются 3 восьмиразрядных регистра К589ИР12, выходы которых соединяются с управляющими входами всех структурных элементов бортового устройства. Электрическая схема блока управления,
0 представленная на фиг. 5, содержит микропроцессор 33 (К18116РВЕ035), постоянное запоминающее устройств 34(К573РФ2) и четыре регистра 35-38 (К589ИР12). В соответствии с программой, записанной в ПЗУ
5 блока управления на регистры 36-58 выдаются серии управляющих импульсов, изображенные на фиг, 2 и 4,
Блок управления может быть также выполнен на программируемых логических
0 матрицах КР588ВУ. Схема должна содержать счетчик, который считает такты работы зондирующего устройства и позволяет выбрать программу из логической матрицы, соответствующую режиму работы каждого
5 такта. При этом блок управления представляет собой простой автомат с памятью.
Кроме того, функции блоков 15-24, 26 могут быть выполнены микропроцессорным вычислителем на базе МП комплекта КР588 (комплект Дипломат). Схема процессора и
инструкция к эксплуатации даны в технической документации МП комплекта.
Таким образом, вычисление параметров S, реализуемое предлагаемым устройством, позволяет повысить скорость зондирования, уменьшить динамическую погрешность измерительных каналов, а значит, повысить точность определения солености, отражать результаты в реальном масштабе времени и получить большее «мело данных, Кроме того, предлагаемое устройство Может быть использовано при вычислении таких параметров водной среды, как плотностьри показатель прелом пения п. Для чего достаточно ввести требуемые коэффициенты полиномов в по- стоянное запоминающее устройство вычислителя солености 21 и соответствующим образом откорректировать алгоритм, записанный в ПЗУ блока управления 26, Формула изобретения 1. Устройство для определения распределения солености воды по глубине, содер- хан ее погружаемое устройство с уста .овленными на нем коммутатором, аналого-цифровым преобразователем, приемопередатчиком, усилителями, датчиками температуры, давления и электропроводности, выходы которых через усилители подключены к входу коммутатора, а выход коммутатора через аналого-цифровой преобразователь к приемопередатчику, а также бортовое устройство, включающее бортовой приемопередатчик и блок индикации, отличающееся тем, что, с целью повышения скорости зондирования, в погружаемое устройство введен дополнительный датчик температуры, дифференциально включенным совместно с другим датчиком к входу дополнительного усилителя, выход которого подключен к входу коммутатора, а
в бортовое устройство введены оперативное запоминающее устройство, три регистра, мультиплексор, вычислитель солености, два сумматора, вычи гающий элемент, масштабный множитель и блок управления, причем входы первого и второго регистров и первые входы мультиплексора, первого сум- матора, вычитающего элемента и вычислителя солености через оперативное запоминающее устройство соединены с выходом бортового приемопередатчика, выходы первого и второго регистров соединены с вторыми входами первого сумматора и вычитающего элемента соответственно, выходы которых соединены с первым и вторым
входами масштабного множителя соответственно, выход которого соедичен с первым входом второго сумматора, выход которого соединен с вторым входом мультиплексора, выход которого через третий регистр соединей с вторым входом второго сумматора и вхолом вычислителя солености, выход которого соединен с входом блока индикации, выходы блока управления соединены с синхронизирующими входами всех структурных эпементов бортового устройства.
2, Устройство поп. 1,отличающее- с я тем, что дополнительный датчик температуры установлен с возможностью перемещения его по штоку относительно группы
основных датчиков на величину требуемой градментометрической базы в направлении зондирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Зондирующее устройство для измерения гидрофизических параметров водной среды | 1985 |
|
SU1287085A1 |
| Устройство для автоматического управления процессом обессоливания нефти | 1987 |
|
SU1473795A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| Зондирующее устройство для измерения параметров водной среды | 1978 |
|
SU742783A1 |
| Морской зондирующий геофизический комплекс | 1978 |
|
SU868434A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА В СИСТЕМАХ ВТОРИЧНОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047185C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2432588C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИМ ЗОНДОМ В СЛОЯХ С БОЛЬШИМИ ГРАДИЕНТАМИ ИЗМЕРЯЕМЫХ ПАРАМЕТРОВ | 2000 |
|
RU2192026C2 |
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1112257A1 |

Использование: океанографические исследования. Сущность изобретения: устройство содержит погружаемое устройство с датчиками давления, электропроводности и двумя датчиками температуры, а также бортовое устройство, содержащее средства запоминания информации, определения разности показаний датчиков температуры вычисления текущего значения солености. 1 з.п ф-лы., 5 ил
LSISSLI
вход j из 03У
dxotf 2из РЗ
#аби ФигЗ
Фиг 4,
HI-
| Устройство для автоматического контроля концентрации электролитов | 1976 |
|
SU571740A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Маклаков А.Ф | |||
| и др Океанографические приборы | |||
| Л/ Гидрометеоиздат, 1975, с 151. | |||
