///////У/Х/У
//У/Х/У
L4«
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостный трансформаторный мостдля изМЕРЕНия пЕРЕМЕщЕНий | 1979 |
|
SU823828A1 |
| Емкостный динамометр | 1985 |
|
SU1345070A1 |
| Емкостный динамометр | 1988 |
|
SU1627868A1 |
| Емкостный измеритель перемещений | 1980 |
|
SU920356A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1979 |
|
SU983439A1 |
| Емкостной трансформаторный мост для измерения перемещений | 1978 |
|
SU765643A1 |
| Емкостный измеритель перемещений | 1981 |
|
SU977930A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1985 |
|
SU1293470A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1985 |
|
SU1259100A1 |
| Емкостной трансформаторный мост для измерения перемещений | 1978 |
|
SU727975A1 |
Изобретение относится к сило- измерительной технике. Цель изобретения - повышение точности за счет компенсации температурных погрешностей. Устр-во содержит упругий элемент 1, преобразователь 2 перемещений, электроды 3 и 4, дифференциальные обмотки 5 и 6 трансформатора 7 напряжений, регулируемую обмотку 8, темпе- ратурозависимый емкостный преобразователь 9, электроды Ю и 11, обмотки 12 и 13 трансформатора 14 с обмоткой 15, индикатор 16 и генератор 17 переменного тока. Введение дополнительного трансформатора 14 и темпера- турозависимого емкостного преобразователя 9 и образование новых связей между элементами устр-ва позволяют скомпенсировать мультипликативную составляющую погрешности динамометра. 2 ил. с (Л
о со
ел со
Изобретение относится к силоизме- рительной технике и можг Т быть использовано для измерения сил в широком диапазоне температур.
Цель изобретения - повьииение точности за счет компенсации температурных погрешностей.
На фиг. 1 схематично изображен емкостный динамометр; на фиг. 2 - зави- симость изменения величины емкости плеч температурозависимого преобразо- :Вателя от температуры.
Динамометр содержит упругий эле- :мент 1, на котором установлен диффе- ;ренциальный емкостный преобразователь 2 перемещений, потенциальные электроды 3 и 4 которого подключены к диф- ференциальным обмоткам 5 и 6 трансформатора 7 напряжений, вторые концы дифференциальных обмоток 5 и 6 соединены вместе и подключены к движку регулируемой обмотки 8 трансформатора 7 напряжений, причем второй конец регулируемой обмотки 8 подключен к общей шине, а температурозависимый емкостный преобразователь 9, установленный на упругом элементе 1, подзслю- чен своими потенциальными электродами 1 О и 1 1 к дифференциальньм обмоткам 12 и 13 дополнительного трансформатора 14, при этом вторые концы обмоток 12 и 13 подключены к общей шине, а первичная обмотка 15 дополнительного трансформатора 14 подключена к движку регулируемой обмотки 8, при этом второй конец обмотки 15 подключен к общей шине, причем токовые выводы емкостного преобразователя 2 и емкостного преобразователя 9 соеди- иены вместе и подключены к входу индикатора 16 равновесия, а к первичной обмотке трансформатора 7 подключен генератор 17 переменного тока.
Динамометр работает следующим об- разом.
Из условия равновесия рассматриваемой цепи ее выходной параметр
г;г
С.+Сг
при
m
(1)
де m
Р
ллакс
количество обмО
ток 5 и 6;
выходной параметр цепи (количество витков регулируемой обмотки 8); максимальное количество витков обмотки 8;
С, иС - значения емкостей емкостного дифференциального преобразователя перемещений, Из (1) видно, что при . При этом движок регулируемой обмот- ки 8 находится в крайнем нижнем положении. Напряжение на обмотке 15 тоже равно нулю. Ток через температурозависимый емкостный преобразователь не течет,
С другой стороны, из (1) видно, что данная схема осуществляет температурную компенсацию преобразователя перемещений (умножение величин емкостей на любой одинаковый коэффициент не изменяет величину Р), Этим компенсируется аддитивная погрешность, т,е. схема является самоскомпенсированной по измеряемому параметру Р для электрической величины. Мультипликативкая погрешность от непостоянства модуля упругости от температуры остается нескомпенсированной. При приложении нагрузки С,С, тогда
(2)
..2f),
где J С ,
Ci-C4 сТ+сГ
и С емкости температурозависимого емкостного преобразователя,
55 0
д
0
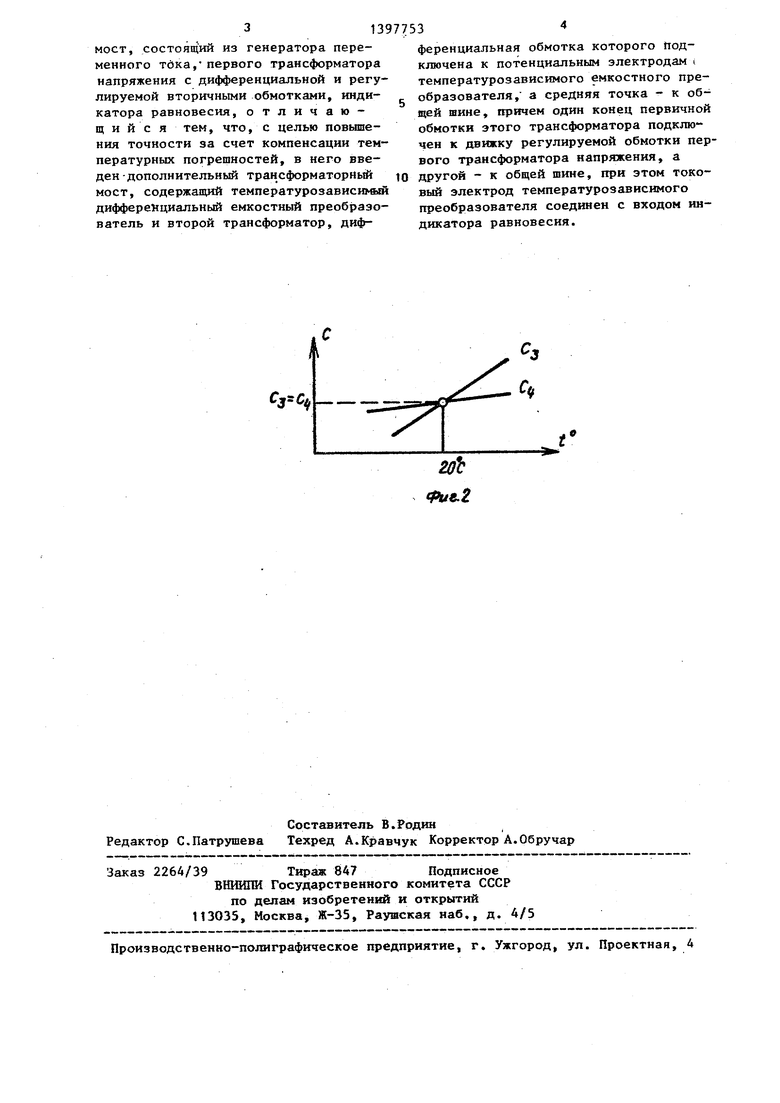
Выбор емкостей С и С. температурозависимого емкостного преобразова- 5 теля осуществляется из условия ТКЕс., ТКЕс и при . Графически эти условия представлены на фиг, 2. ТКЕ - температурный коэффициент кости.
При изменении температуры в ту или иную сторону от номинальной член в скобках выражения (2) будет либо боль- га®, либо меньше единицы, изменяя угол наклона передаточной характеристик динамометра.
Таким образом, введение дополнительного трансформатора напряжений и температурозависимого емкостного преобразователя, а также новых связей позволяет скомпенсировать и мультипликативную составляющую погрешности динамометра.
Формула и. зобретения
Емкостный динамометр, содержащий упругий чувствительный элемент, емкостный дифференциальный преобразователь перемещений и трансформатооный
мост, состоящий из генератора переменного тика, первого трансформатора напряжения с дифференциальной и регулируемой вторичными обмотками, индикатора равновесия, отличающийся тем, что, с целью повышения точности за счет компенсации температурных погрешностей, в него введен -дополнительный трансформаторньй мост, содержащий температурозависи вйй дифференциальный емкостный преобразователь и второй трансформатор, дифCy Ctf
ференциальная обмотка которого Подключена к потенциальным электродам ( температурозависимого емкостного преобразователя, а средняя точка - к общей шине, причем один конец первичной обмотки этого трансформатора подключен к движку регулируемой обмотки первого трансформатора напряжения, а другой - к общей шине, при этом токовый электрод температурозависимого преобразователя соединен с входом индикатора равновесия.
е
20Ъ ffue.2
| Емкостной преобразователь усилия | 1984 |
|
SU1176186A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузовников A.M | |||
| О повышении точности образцовых динамометров третьего разряда | |||
| - Всес | |||
| научн.-техн | |||
| конф | |||
| Измерение силы | |||
| Современные методы и средства | |||
| Л., 1983, с.14-15. | |||
