Изобретение относится к измерительной технике и, может быть использовано для измерения сил.
Цель изобретения - повышение точности.
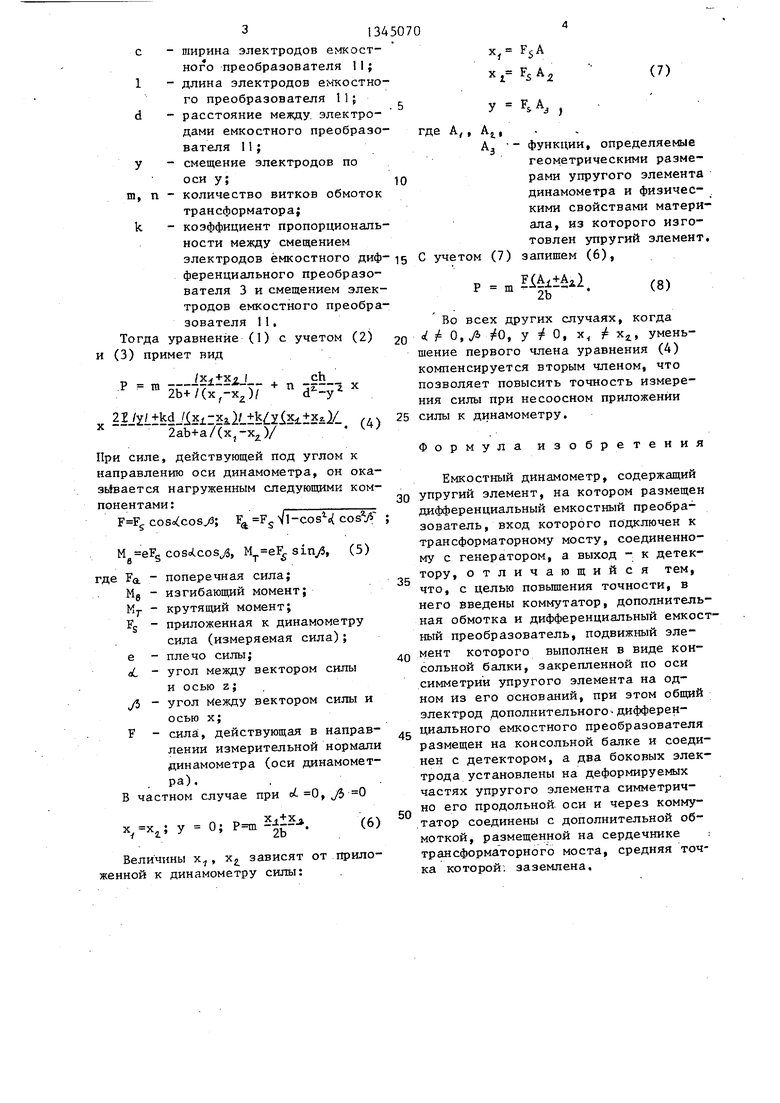
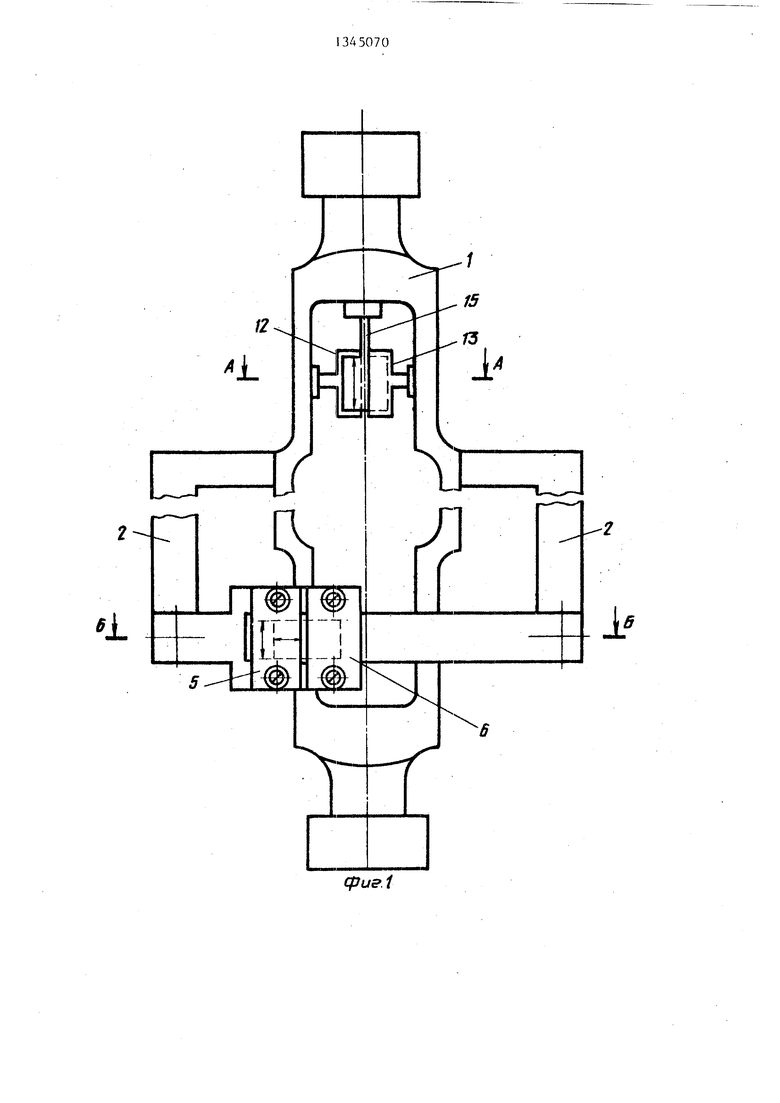
На фиг. 1 представлена конструктивная схема динамометра; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг, 4 - схема деформации упругого элемента; на фиг, 5 - блок-схема динамометра.
Емкостный динамометр для измерения силы содержит упругий элемент 1 с флажками 2, емкостный дифференциальный преобразователь 3 с общим электродом А, дифференциальными электродами 5 и 6, подключенными к дифференциальным обмоткам 7 и 8 трансформатора 9 напряжений, регулирз е- мую обмотку 10, один конец которой подключен к средней точке дифференциальных обмоток 7 и 8, а второй конец заземлен, дополнительный дифферазователя
одинаковы и выходной си нал емкостного преобразователя рав нулю. Если направление приложенной
J. к упругому элементу силы не совпад ет с его осью симметрии, то емкост дифференциальный преобразователь 3 регистрирует занижение показаний, вызванное перераспределением силы
10 параллельным ветвям упругого элеме та. Перераспределение силы вызывае перекос упругого элемента (возникн вение изгибающего момента), и пере мещения электродов 12 и 13 емкостн
15 преобразователя станут неодинаковы Выходной сигнал емкостного преобра вателя, пропорциональный величине перекоса (изгибающего момента) упр гого элемента, вводится в измерите
20 ную цепь через коммутатор 17, при этом равновесие моста нарушается н величину, пропорциональную этому изгибающему моменту, а компенсация этого неравновесия осуществляется
ренциальный емкостный преобразователь 25 регулированием витков обмотки 10.
11 с двумя потенциальными электродами 12 и 13, закрепленными на деформируемой части упругого элемента 1, и токовым общим электродом 14, закрепленным на консольной балке 15, и дополнительную обмотку 16, средняя точка которой заземлена, а концы ее подключены к потенциальным электро- дам 12 и 13 емкостного преобразователя 11 через коммутатор 17, причем общий электрод 4 емкостного дифферен- циального преобразователя и токовый электрод 14 емкостного преобразователя соединены вместе и подключены к входу детектора 18 равновесия, при этом первичная обмотка 19 трансформатора .9 напряжений подключена к генератору 20 напряжений.
Емкостный динамометр работает следующим образом.
При приложении силы к упругому элементу, последний деформируется. Деформация упругого элемента, пропорциональная приложенной силе, воспринимается емкостным дифференциальным преобразователем 3 перемещений, при этом приращение емкости измеряется трансформаторной мостовой схемой, Отсчет измеряемой величины производится по количеству витков регулируемой обмотки 10.
Если сила приложена соосно с осью
упругого элемента, то перемещения электродов 12 и 13 емкостного преоб
45070
разователя
одинаковы и выходной сигнал емкостного преобразователя равен нулю. Если направление приложенной
J. к упругому элементу силы не совпадает с его осью симметрии, то емкостный дифференциальный преобразователь 3 регистрирует занижение показаний, вызванное перераспределением силы по
10 параллельным ветвям упругого элемента. Перераспределение силы вызывает перекос упругого элемента (возникновение изгибающего момента), и перемещения электродов 12 и 13 емкостного
15 преобразователя станут неодинаковыми. Выходной сигнал емкостного преобразователя, пропорциональный величине перекоса (изгибающего момента) упругого элемента, вводится в измеритель20 ную цепь через коммутатор 17, при этом равновесие моста нарушается на величину, пропорциональную этому изгибающему моменту, а компенсация этого неравновесия осуществляется
Выходной параметр измерительной цепи с дифференциальным 3 и емкостным 11 преобразователями запишется
р jn С +С S -2
+П
CiiSi
)
(1)
5
1
С, и Сх
где С и Cj - емкости дифференциального емкостного преобразователя 3; - емкости емкостного преобразователя 1 1.
Через геометрические размеры и перемещения электродов эти емкости равны:
a(b+x.L),
о, -- ,
а(Ь-х). Cih
(2)
г . г - l.
Ц- Ч- з+у-
5
где
d-y
е О-(3)
0
Ч
5
Х2
h
диэлектрическая проницаемость воздуха (.1); ширина электродов дифференциального емкостного преобразователя; длина электродов дифференциального емкостного преобразователя; смещение электродов по оси XJ
расстояние между электродами емкостного дифференциального преобразователя 3;
. 5
у
i«
31345070
с - ширина электродов емкостного преобразователя 11;
1 - длина электродов е1чкостно- го преобразователя 11;
d - расстояние между, электродами емкостного преобразо- где А , А вателя 11;
3
у - смещение электродов по
оси у;,Q
m, п - количество витков обмоток
трансформатора;
k - коэффициент пропорциональности между смещением
электродов ёмкостного диф-15 С учетом (7) ференциального преобразователя 3 и смещением электродов емкостного преобразователя 11,
Тогда уравнение (1) с учетом (2) (3) примет вид
Р ,
Во всех д
20
« 0, 0, щение первог компенсирует позволяет пов ния силы при силы к динамо
.Р
га
ch
:5г---г
(4
+ 2b+/(x,-X2)/
X .j:kd /ix±IXilLilS Yixiix.y 2ab+a/(x,-x)/
При силе, действующей под углом к направлению оси динамометра, он ока зь вается нагруженным следующими компонентами:
l cos -c( cosV
coS(cos, sin/, (5)
где Fa - поперечная сила;
Mg - изгибающий момент;
М;- - крутящий момент;
Fg - приложенная к динамометру сила (измеряемая сила);
е - плечо силы;
- угол между вектором силы и осью z;
у5 - угол между вектором силы и осью х;
F - сила, действующая в направлении измерительной нормали динамометра (оси динамометра). В частном случае при ci 0, 0
у 0;
Р ..
Величины х , х зависят от приложенной к динамометру силы:
FsA
(7)
5
у
где А , А
FsA,
)
- функции, определяемые геометрическими размерами упругого элемента динамометра и физическими свойствами материала, из которого изготовлен упругий элемент,
запишем (6),
15 С учетом (7)
Р , Il|xiA.i. 2b
Во всех других случаях,
(8)
20
Ч
когда умень
25
« 0, 0, у О, X, ji щение первого члена уравнения (4) компенсируется вторым членом, что позволяет повысить точность измерения силы при несоосном приложении силы к динамометру.
Формула изобретения
;
30
35
40
Емкостный динамометр, содержащий упругий элемент, на котором размещен дифференциальный емкостный преобразователь, вход которого подключен к трансформаторному мосту, соединенному с генератором, а выход - к детектору, отличающийся тем, что, с целью повьщхения точности, в него введены коммутатор, дополнительная обмотка и дифференциальный емкостный преобразователь, подвижный элемент которого выполнен в виде консольной балки, закрепленной по оси симметрии упругого элемента на одном из его оснований, при этом общий электрод дополнительногодифферен- .g циального емкостного преобразователя размещен на консольной балке и соединен с детектором, а два боковых электрода установлены на деформируемых частях упругого элемента симметрично его продольной, оси и через коммутатор соединены с дополнительной обмоткой, размещенной на сердечнике i трансформаторного моста, средняя точка которой; заземлена.
50
fZ
1
/
/5
/3
1
i
IE
Л I
f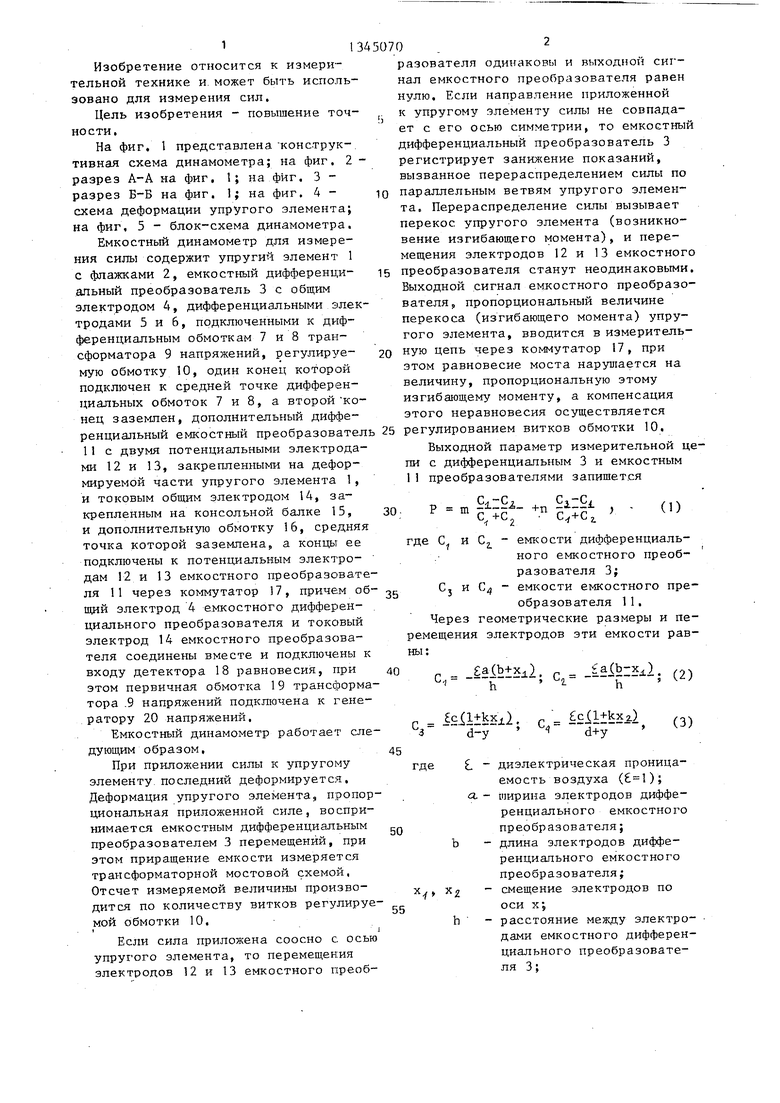
| название | год | авторы | номер документа |
|---|---|---|---|
| Двойной трансформаторный мост переменного тока для измерения перемещений | 1978 |
|
SU727974A1 |
| Емкостный динамометр | 1986 |
|
SU1397753A1 |
| Емкостной трансформаторный мост для измерения перемещений | 1975 |
|
SU636468A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1985 |
|
SU1259100A1 |
| Емкостный трансформаторный мостдля изМЕРЕНия пЕРЕМЕщЕНий | 1979 |
|
SU823828A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1978 |
|
SU706681A1 |
| Емкостный измеритель перемещений | 1984 |
|
SU1195182A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1985 |
|
SU1293470A1 |
| Емкостный трансформаторный мост для измерения перемещений | 1979 |
|
SU983439A1 |
| Емкостной трансформаторный мост для измерения перемещений | 1976 |
|
SU861925A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности. При приложении силы к упругому элементу последний деформируется. Если направление приложенной к упругому элементу силы не совпадает с его осью симметрии, то емкостный дифференциальный преобразователь 3 регистрирует занижение показаний, вызванное перераспределением силы по параллельным ветвям упругого элемента. Последнее вызовет перекос упругого элемента, и перемещения электродов 12 и 13 емкостного преобразователя станут неодинаковыми. Выходной сигнал емкостного преобразователя, пропорциональный величине перекоса (изгибающего момента), вводится в измерительную цепь через коммутатор 17, равновесие моста нарушается на величину, пропорциональную это му изгибающему моменту, а компенсация этого неравновесия осуществляется регулированием витков обмотки 10. 5 ил.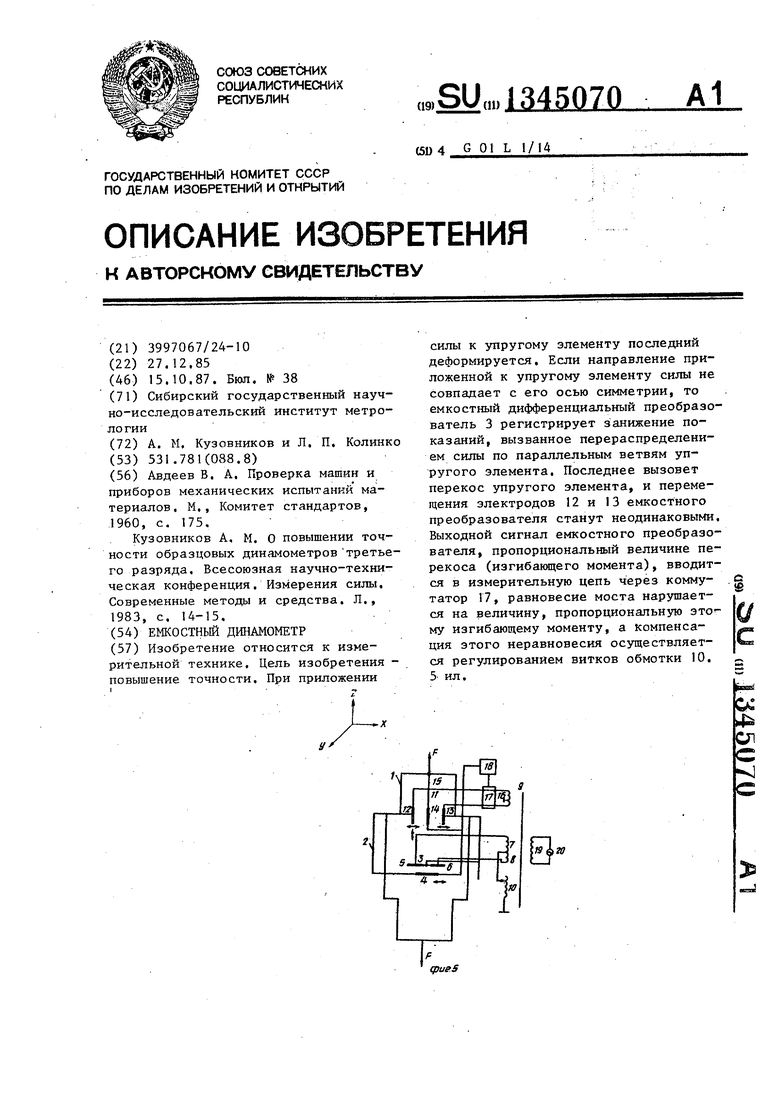
« jEyt/. /
А-А
И
ffoSf. 16
.fS /fpSn /6 к
13
)-M
Срие.З
Н UM ttomopy te )ff oSKfofrrfrt 9 -О ff аУмотне 7
r
Составитель A, Экономов Редактор М. Петрова Техред Л.ОлийныкКорректор И, Муска
Заказ 4910/41Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий И3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Авдеев В | |||
| А | |||
| Проверка машин и приборов механических испытаний материалов | |||
| М., Комитет стандартов, 1960, с | |||
| Ручной прибор для загибания кромок листового металла | 1921 |
|
SU175A1 |
| Кузовников А | |||
| М | |||
| О повышении точности образцовых динамометров третьего разряда | |||
| Всесоюзная научно-техническая конференция | |||
| Измерения силы | |||
| Современные методы и средства | |||
| Л., 1983, с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
