00 со
00 О5
ю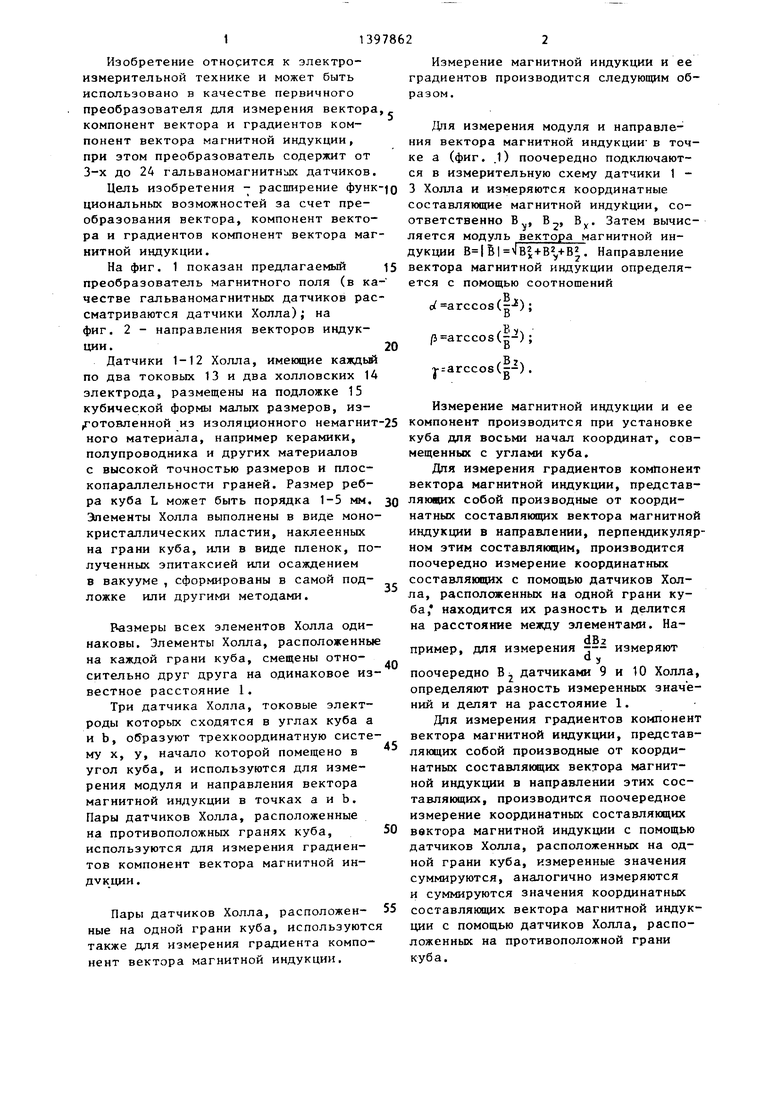
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкомпонентная мера магнитного момента | 2024 |
|
RU2824326C1 |
| ПЛАНАРНЫЙ МАГНИТОТРАНЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2422943C1 |
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
| ПЛАНАРНЫЙ БИПОЛЯРНЫЙ МАГНИТОТРАНЗИСТОР | 2010 |
|
RU2439748C1 |
| ИНТЕГРАЛЬНЫЙ ГРАДИЕНТНЫЙ МАГНИТОТРАНЗИСТОРНЫЙ ДАТЧИК | 2010 |
|
RU2453947C2 |
| Магнитоанизотропный датчик механических усилий | 1986 |
|
SU1318810A1 |
| ДАТЧИК МАГНИТНОГО ПОЛЯ | 2004 |
|
RU2262777C1 |
| УСТРОЙСТВО МАГНИТНОГО ДЕФЕКТОСКОПА И СПОСОБ УМЕНЬШЕНИЯ ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕФЕКТОВ ТРУБОПРОВОДА МАГНИТНЫМИ ДЕФЕКТОСКОПАМИ | 2014 |
|
RU2586261C2 |
| ИНТЕГРАЛЬНЫЙ МАГНИТОТРАНЗИСТОРНЫЙ ДАТЧИК С ЦИФРОВЫМ ВЫХОДОМ | 2009 |
|
RU2437185C2 |
| Устройство для электрофизиологических исследований | 1987 |
|
SU1616602A1 |
Изобретение относится к электроизмерительной технике и может быть использовано в качестве первичного преобразователя для измерения вектора, компонент вектора и градиентов компонент вектора магнитной индукции. Преобразователь магнитного поля (ПМП) содержит гальваномагнитные датчики (ГМД), расположенные на гранях кубической подложки 15, при зтом одинаковые ГМД установлены попарно на каждой грани кубической подложки 15, три боковые стороны каждого ГМД примыкают к ребрам кубической подложки 15, направления токов в каждой паре ГМД совпадают, а направления токов ГМД, расположенных на противоположных гранях, взаимно ортогональны. ГМД выполнены в виде монокристаллическ х пластин, наклеенных на грани куба, или в виде пленок, полученных эпитак- сией или осаждением в вакууме. ПМП позволяет производить измерения без его механических перемещений, что увеличивает достоверность измерений и сокращает время, а также улучшает возможность автоматизации измерений с использованием средств вычислительной техники. 2 ил. 5 (Л
Фи.1
t
Изобретение относится к электроизмерительной технике и может быть использовано в качестве первичного преобразователя для измерения вектора, компонент вектора и градиентов компонент вектора магнитной индукции, при этом преобразователь содержит от 3-х до 24 гальваномагнитных датчиков.
Цель изобретения - расширение функ- д 3 Холла и измеряются координатные
циональных возможностей за счет преобразования вектора, компонент вектора и градиентов компонент вектора магнитной индукции.
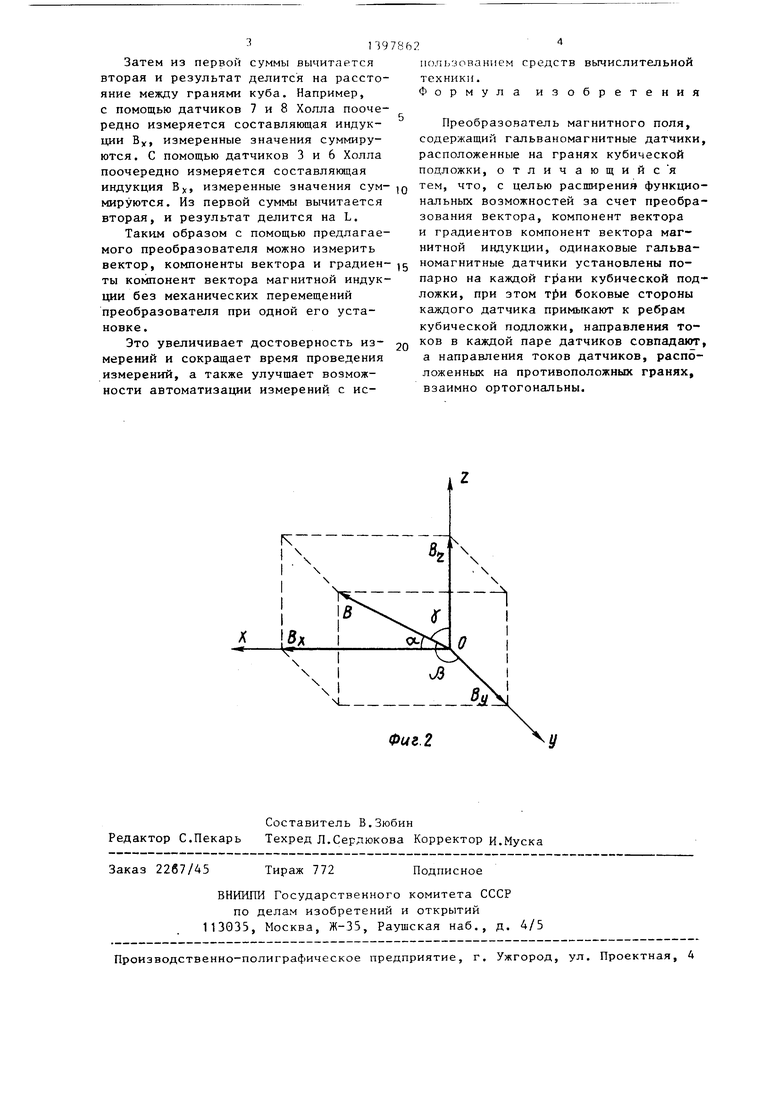
На фиг. 1 показан предлагаемый 15 преобразователь магнитного поля (в ка- честве гальваномагнитных датчиков рассматриваются датчики Холла); на фиг. 2 - направления векторов индукции .20
Датчики 1-12 Холла, имеющие каждьй по два токовых 13 и два холловских 14 электрода, размещены на подложке 15 кубической формы малых размеров, изсоставляющие магнитной индукции, с ответственно В.,, В, В.,. Затем выч
ляется модуль вектора магнитной ин дукции В |В| 4в|Тв2|+в|. Направлени вектора магнитной индукции определ ется с помощью соотношений
п
o arccos(--);
в
(D N В
/Вгч -rarccos(g-).
Измерение магнитной индукции и
готовленной из изоляционного немагнит-25 компонент производится при установке
ного материала, например керамики, полупроводника и других материалов с высокой точностью размеров и плос- копараллельности граней. Размер ребра куба L может быть порядка 1-5 мм. Эпементы Холла выполнены в виде монокристаллических пластин, наклеенных на грани куба, или в виде пленок, полученных эпитаксией или осаждением в вакууме , сформированы в самой подложке или другими методами.
Размеры всех элементов Холла одинаковы. Элементы Холла, расположенные на каждой грани куба, смещены относительно друг друга на одинаковое известное расстояние 1.
Три датчика Холла, токовые электроды которых сходятся в углах куба а и Ь, образуют трехкоординатную систему X, у, начало которой помещено в угол куба, и используются для измерения модуля и направления вектора магнитной индукции в точках а и Ь. Пары датчиков Холла, расположенные на противоположных гранях куба, используются для измерения градиентов компонент вектора магнитной ИНДУКЦИИ.
Пары датчиков Холла, расположенные на одной грани куба, используются также для измерения градиента компонент вектора магнитной индукции.
Измерение магнитной индукции и ее градиентов производится следующим образом.
Для измерения модуля и направления вектора магнитной индукции в точке а (фиг. .1) поочередно подключаются в измерительную схему датчики 1 составляющие магнитной индукции, соответственно В.,, В, В.,. Затем вычис
ляется модуль вектора магнитной индукции В |В| 4в|Тв2|+в|. Направление вектора магнитной индукции определяется с помощью соотношений
п
o arccos(--);
в
(D N В
/Вгч -rarccos(g-).
Измерение магнитной индукции и ее
О
5
0
5
0
5
куба для восьми начал координат, совмещенных с углами куба.
Для измерения градиентов компонент вектора магнитной индукции, представляющих собой производные от координатных составляющих вектора магнитной индукции в направлении, перпендикулярном этим составляющим, производится поочередно измерение координатных составляющих с помощью датчиков Холла, расположенных на одной грани куба, находится их разность и делится на расстояние между элементами. НаdBz
пример, для измерения -- измеряют
d ,,
поочередно В датчиками 9 и 10 Холла, определяют разность измеренных значений и делят на расстояние 1.
Для измерения градиентов компонент вектора магнитной индукции, представляющих собой производные от координатных составляющих вектора магнитной индукции в направлении этих составляющих, производится поочередное измерение координатных составляющих вектора магнитной индукции с помощью датчиков Холла, расположенньк на одной грани куба, измеренные значения суммируются, аналогично измеряются и суммируются значения координатных составляющих вектора магнитной индукции с помощью датчиков Холла, расположенных на противоположной грани куб а.
Затем из первой суммы вычитается вторая и результат делится на расстояние между гранями куба. Например, с помощью датчиков 7 и 8 Холла поочередно измеряется составляющая индукции By, измеренные значения суммируются. С помощью датчиков 3 и 6 Холла поочередно измеряется составляющая индукция BX, измеренные значения суммируются. Из первой суммы вычитается вторая, и результат делится на L.
Таким образом с помощью предлагаемого преобразователя можно измерить вектор, компоненты вектора и градиенты компонент вектора магнитной индукции без механических перемещений преобразователя при одной его установке.
Это увеличивает достоверность измерений и сокращает время проведения измерений, а также улучшает возможности автоматизации измерений с ис JOtf
Составитель В.Зюбин Редактор С.Пекарь Техред Л.Сердюкова Корректор И.Муска
Заказ 2267/45
Тираж 772
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
пользованием средств вычислительной
техники.
Формула изобретения
Преобразователь магнитного поля, содержащий гальваномагнитные датчики, расположенные на гранях кубической подложки, отличающийс я тем, что, с целью расширения функциональных возможностей за счет преобразования вектора, компонент вектора и градиентов компонент вектора магнитной индукции, одинаковые гальваномагнитные датчики установлены попарно на каждой грани кубической подложки, при этом боковые стороны каждого датчика примыкают к ребрам кубической подложки, направления токов в каждой паре датчиков совпадают, а направления токов датчиков, расположенных на противоположных гранях, взаимно ортогональны.
Фиг. 2
Подписное
