Изобретение относится к области измерительной техники и предназначено для создания трехкомпонентной меры магнитного момента, используемой в качестве источника магнитного поля для решения различных измерительных, в том числе метрологических, задач.
Источниками МП по своему происхождению могут быть как ферромагнитные (ферромагнитные массы объекта), так и электрические (катушки с током). Магнитный момент (ММ) является векторной величиной, характеризующей источник магнитного поля (МП) в выбранной системе координат (СК). Для измерения характеристик МП (магнитной индукции - МИ) и его источника (ММ) применяются магнитометры с трехкомпонентными датчиками. При этом метрологические характеристики магнитометров должны нормироваться как по величине МИ, так и величине ММ.
Для проверки качества (поверки) таких магнитометров по измеряемой величине магнитной индукции применяются трехкомпонентные меры МИ, а при поверке магнитометров по измеряемой величине ММ должны применяться трехкомпонентные меры ММ.
Известна мера магнитного момента ЭМММ [1. Государственный реестр средств измерений. Регистрационный №67707-17], разработанная ООО «Криомаг» (2009 г.).
Кроме того, известны меры ММ, применяемые в составе Государственного первичного эталона ГЭТ 12-2011 [2. ГОСТ 8.030-2013. Государственная поверочная схема для средств измерений магнитной индукции, магнитного потока, магнитного момента и градиента магнитной индукции], в частности - эталонная кварцевая катушка магнитной индукции, магнитного потока и магнитного момента КС-4, а также эталонная кварцевая мера (катушка) магнитного момента ЭКММ-1.
Меры ММ типа ЭМММ и ЭКММ-1 различаются только применяемыми материалами и техническими характеристиками.
Основным конструктивно-техническим недостатком этих мер ММ является их однокомпонентность, т.е. направленность вектора ММ (М) вдоль одной из назначенных осей системы координат устройства, что не позволяет выполнять измерения одновременно значений трех компонент вектора М (МХ, MY, MZ). Последовательный поворот меры для измерений остальных ее компонент требует дополнительного времени, что при наличии неоднородных во времени электромагнитных помех влечет за собой возможные неучтенные погрешности измерений.
Кроме того, мера ЭМММ, используемая в качестве рабочего эталона, имеет фиксированные размеры (195×182×182 мм) при достаточно широком диапазоне воспроизводимых значений ММ (от 0,05 до 30 Ам2), что не всегда удобно при воспроизведении значений ММ менее 1 Ам2.
В результате анализа перечисленных выше конструктивно-технических решений по совокупности существенных признаков ближайшим аналогом заявляемого устройства принято устройство, представленное в [1].
Задача, на решение которой направлено заявляемое изобретение, заключается в создании трехкомпонентной меры ММ, обеспечивающей одновременное воспроизведение значений компонент МХ, MY, MZ вектора М по осям ее СК (ХМ, YM, ZM) в целях поверки средств измерений ММ по измеряемой величине.
Технический результат, получаемый при осуществлении заявляемого изобретения, заключается в том, что при использовании трехкомпонентной меры ММ обеспечивается существенное сокращение времени измерений значений компонент вектора М (МХ, MY, MZ), исключение возникающих при использования устройства-аналога неучтенных погрешностей измерений, а также возможность ее изготовления с различными габаритными размерами с учетом условий решаемых измерительных задач.
Указанный технический результат достигается тем, что заявляемая трехкомпонентная мера магнитного момента, содержащая катушку (площадь - S, количество витков -  ) с током I в ортогональной СК с осями ХК, YК и ZК (с центром в точке 0к на диагонали куба), расположенную в корпусе кубической формы, создает ММ по оси ZК, единичный вектор которого совпадает с направлением диагонали куба корпуса меры, выходящей из одной из вершин его основания, которая одновременно является центром опорной ортогональной СК меры ММ с осями ХМ, YM и ZM (с центром в точке 0М) по соответствующим ребрам куба, с равновеликими значениями составляющих (компонент) ММ (МХ, MY, MZ) в СК меры, определяемыми выражением:
) с током I в ортогональной СК с осями ХК, YК и ZК (с центром в точке 0к на диагонали куба), расположенную в корпусе кубической формы, создает ММ по оси ZК, единичный вектор которого совпадает с направлением диагонали куба корпуса меры, выходящей из одной из вершин его основания, которая одновременно является центром опорной ортогональной СК меры ММ с осями ХМ, YM и ZM (с центром в точке 0М) по соответствующим ребрам куба, с равновеликими значениями составляющих (компонент) ММ (МХ, MY, MZ) в СК меры, определяемыми выражением:

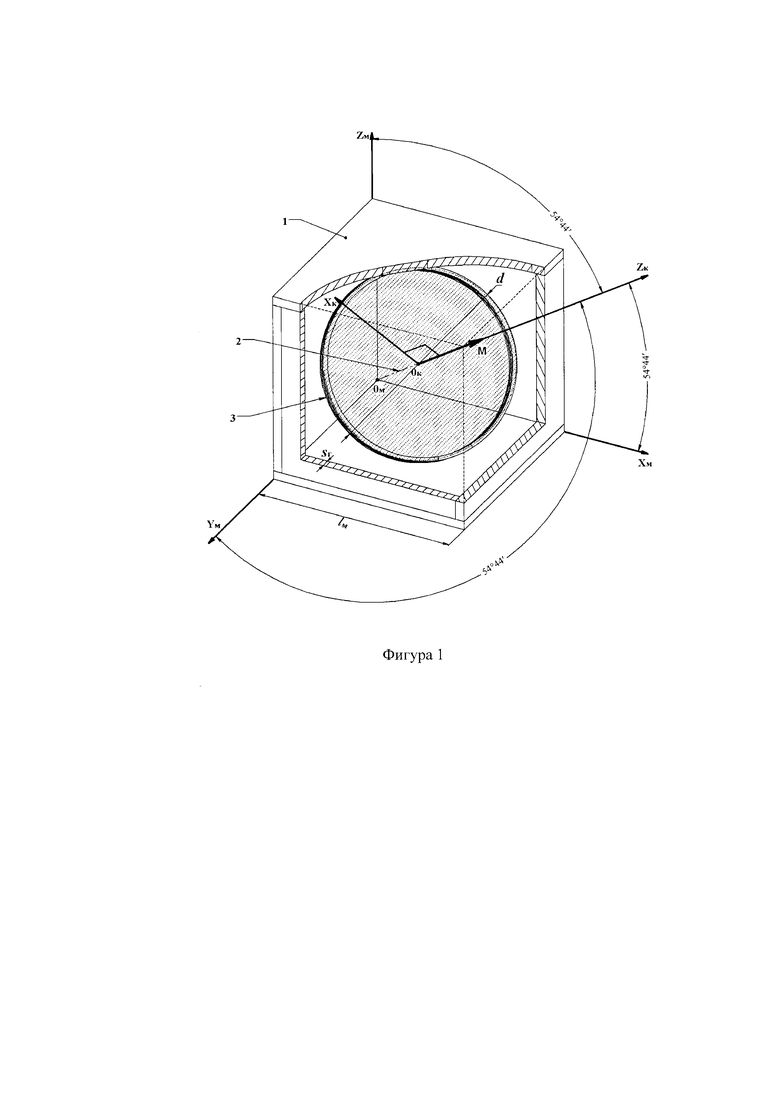
Конструктивное исполнение заявляемого устройства представлено на чертеже (фиг. 1), на которой показаны: 1 - корпус куба; 2 - диагональ куба; 3 - катушка; sг - толщина грани куба;  - длина ребра корпуса меры; d - диаметр катушки; М - вектор магнитного момента; (0М, ХМ, YM, ZM) - СК меры; (0К, ХК, YК, ZК) - СК катушки с током (координата YК не показана, чтобы не затенять рисунок). При этом центр СК катушки с током (точка 0К) является точкой приложения вектора ММ (М), создаваемого данной катушкой, которая относительно центра СК меры (точка 0М) имеет координаты
- длина ребра корпуса меры; d - диаметр катушки; М - вектор магнитного момента; (0М, ХМ, YM, ZM) - СК меры; (0К, ХК, YК, ZК) - СК катушки с током (координата YК не показана, чтобы не затенять рисунок). При этом центр СК катушки с током (точка 0К) является точкой приложения вектора ММ (М), создаваемого данной катушкой, которая относительно центра СК меры (точка 0М) имеет координаты  в СК меры.
в СК меры.
Технологической особенностью конструкции заявляемого устройства является обеспечение конструктивного размещения катушки ММ в корпусе (кубической формы) меры (вне зависимости от выбранных способов намотки и крепления катушки, а также ее формы) таким образом, чтобы ось ZК, являющаяся магнитной осью катушки, находилась под углами  к граням куба, являющимся координатными плоскостями СК меры ММ.
к граням куба, являющимся координатными плоскостями СК меры ММ.
Учитывая, что значение величины ММ зависит от значения постоянного тока I [А], протекающего в катушке меры с количеством витков w и площадью S [м2], размеры корпуса меры (куба), изготавливаемого из немагнитного материала, а также характеристики катушки ММ и источника постоянного тока рассчитываются исходя из требований к значению модуля М создаваемого (воспроизводимого) вектора ММ (М) или к значениям его компонент МХ, MY, MZ.
В частности, для воспроизведения вектора М с заданным значением модуля М=1 Ам2 возможно изготовить трехкомпонентную меру ММ со следующими основными параметрами:
- источник тока силой I=1,0 А;
- количество витков катушки 
- площадь (средняя) катушки S=0,01 м2.
Значения компонент МХ, MY, MZ модуля М вектора М по осям СК меры, определяются выражением

Следует иметь в виду, что значения компонент МХ, MY и MZ, с учетом расположения вектора М относительно осей СК меры, в заявленном устройстве будут равны между собой, т.е. МХ=MY=MZ.
В этом случае, выражение (2) можно преобразовать, как

где М - любая из компонент вектора М.
Таким образом, при значении заданного модуля вектора М=1 Ам2, из (3) получаем значения компонент МХ, MY, MZ, которые в заявленном устройстве должны составлять: 
Диаметр d катушки, который из установленного размера площади S определяется как

является исходным для установления размера длины ребра куба  [м], который определяется из решения простейшей геометрической задачи с учетом толщины граней куба sг.
[м], который определяется из решения простейшей геометрической задачи с учетом толщины граней куба sг.

Например, для толщины sг равной 5⋅10-3 м (5 мм) значение  будет определяться как
будет определяться как
Для значения S=0,01 м2 из (4) получаем значение d=0,1128 м ≅ 11,3 см. Следовательно, из (5) получаем значение 

Соответственно, если задаются требования к значениям компонент вектора М, то решая задачу в обратном порядке, определяется значение модуля М вектора М и по этому значению рассчитываются основные параметры меры ММ.
Например, при задании требований к значениям компонент Mi=1 Ам2, значение модуля М вектора М составит

В этом случае, при тех же параметрах корпуса меры  и катушки MM
и катушки MM  изменится только значение тока, которое в этом случае составит I=1,732 А.
изменится только значение тока, которое в этом случае составит I=1,732 А.
Применительно к верхнему значению диапазона воспроизводимого ММ выбранного устройства-аналога (М=30 Ам2), используя изложенную расчетную процедуру возможно изготовить трехкомпонентную меру ММ с указанным значением модуля вектора ММ, например, со следующими основными параметрами:
- источник тока силой /=2,0 А;
- количество витков катушки w=150;
- площадь (средняя) катушки S=0,1 м2.
При этом значение длины ребра корпуса устройства с учетом толщины sг равной 5⋅10-3 м (5 мм) составит 
Исходя из приведенных расчетов, очевидно, что целесообразно изготавливать заявляемое устройство в нескольких конструктивных модификациях для различных диапазонов воспроизводимых в соответствии с [2] значений ММ.
Например, для диапазона значений ММ от 0,05 Ам2 до 1,0 Ам2, возможно изготовить трехкомпонентную меру ММ, например, со следующими основными параметрами:
- источник тока силой Ш в диапазоне от 0,05 А до 1,0 А;
- количество витков катушки
- площадь (средняя) катушки S=0,01 м2;
- длина ребра корпуса устройства 
Для диапазона значений ММ от 1,0 Ам2 до 30,0 Ам2, возможно изготовить трехкомпонентную меру ММ, например, со следующими основными параметрами:
- источник тока силой I в диапазоне от 1,0 А до 30,0 А;
- количество витков катушки 
- площадь (средняя) катушки S=0,1 м2;
- длина ребра корпуса устройства 
Описанные примеры также показывают:
- заявленная трехкомпонентная мера ММ обеспечивает возможность получения различных значений модуля М воспроизводимого вектора М и значений его компонент (МХ, MY, MZ) посредством изменения значений силы тока, задаваемого источником тока, без дополнительных затратных процедур (поворотов меры);
- исходя из требований конкретной измерительной задачи, габаритные размеры корпуса меры при ее изготовлении могут изменяться в диапазоне значений от (100×100×100) мм до (300×300×300) мм.
Контроль углов расположения оси ZК СК катушки относительно осей СК меры является важнейшей процедурой изготовления устройства и должен проводиться в два этапа.
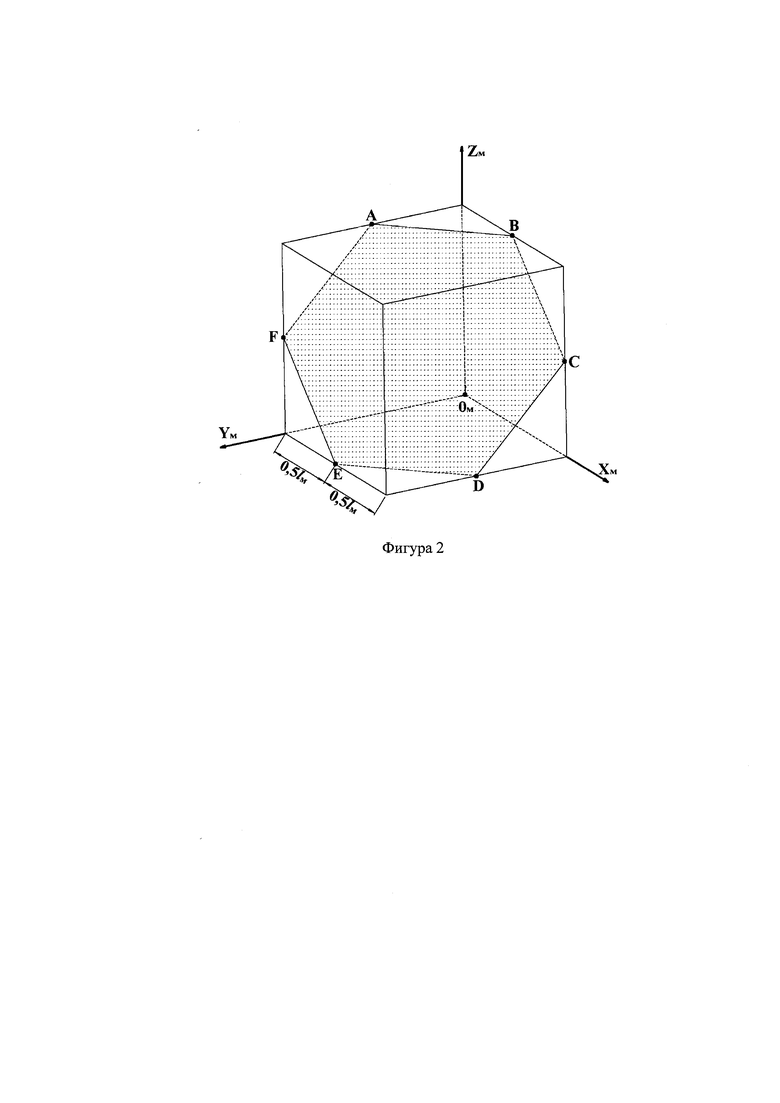
Этап 1 - контроль расположения плоскости катушки меры относительно СК меры осуществляемый методами линейных измерений.
В качестве примера, на чертеже (фиг. 2) показано расположение плоскости, на которой размещается катушка меры. Указанная плоскость пересекает соответствующие ребра куба в точках A-F, разделяя пересекаемые ребра куба на два равных отрезка  При этом в точках пересечения плоскостью катушки ребер куба контролируется условие равенства этих отрезков.
При этом в точках пересечения плоскостью катушки ребер куба контролируется условие равенства этих отрезков.
Этап 2 - контроль условия равенства модулей значений МИ в контрольных точках измерительного стенда магнитометрическим методом.
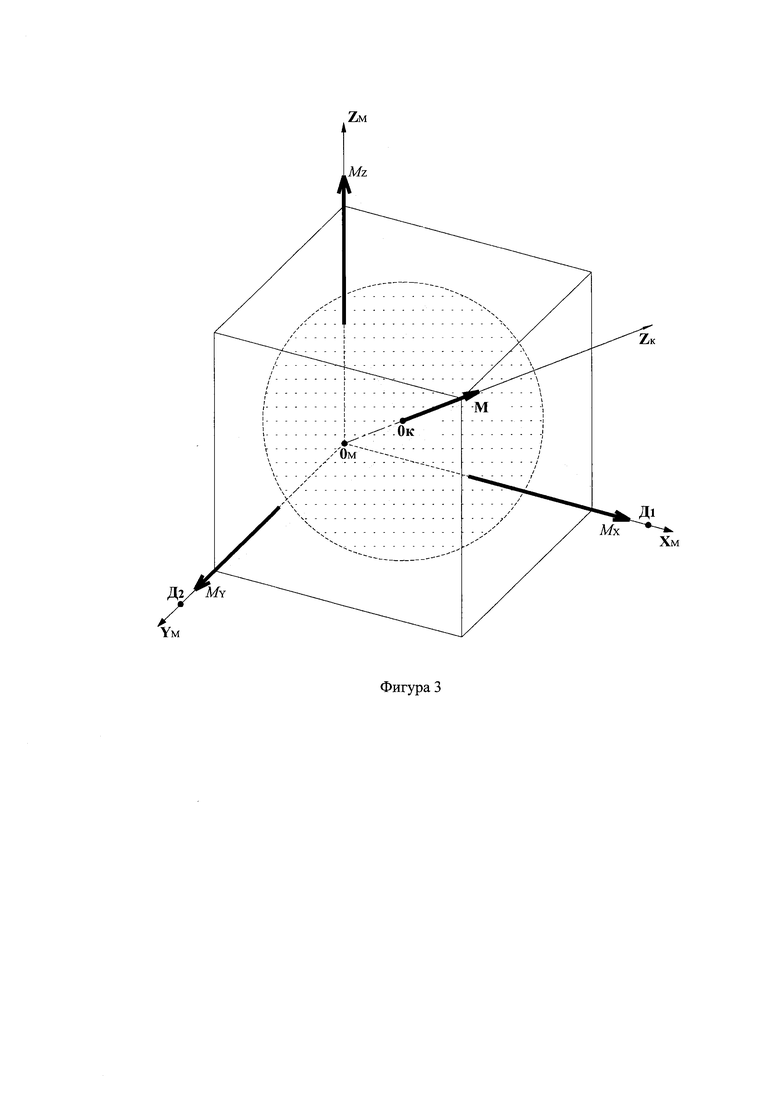
Схема расположения датчиков магнитометров на стенде контроля представлена на чертеже (фиг. 3).
Датчики Д1 и Д2 размещаются на плоскости (XM0MYM) нижней грани куба корпуса меры на осях меры ХМ и YM на равных расстояниях от начала СК (0М).
При этом ось X СК датчика Д1 направлена по оси ХМ, а ось Y СК датчика Д2 направлена по оси YM СК меры.
Условием равенства углов расположения оси ZК СК катушки относительно осей СК меры являются соотношения:

где: ВХ1, BZ1 - значения соответствующих компонент магнитной индукции измеренных датчиком Д1; BY2 и BZ2 значения соответствующих компонент магнитной индукции измеренных датчиком Д2.
Соотношение (6) справедливо поскольку в данной конструкции предлагаемой меры ММ значения компонент вектора М равны между собой (МХ=MY=MZ), а датчики Д1 и Д2 расположены на одинаковом расстоянии от центра СК меры (0М).
При необходимости возможна установка дополнительных датчиков и механических «доводчиков» для максимально точного достижения контрольных условий равенства угла расположения оси ZК СК катушки относительно осей СК меры.
Погрешность измерения тока в катушке, а также отличия конструктивно-технологического исполнения трехкомпонентной меры ММ от ее геометрического построения являются источниками погрешностей меры, которые определяются при ее метрологической аттестации.
Таким образом, реализация заявляемого устройства с учетом технологических особенностей его конструкции и контроля позволит создать трехкомпонентную меру ММ и обеспечить поверку трехкомпонентных магнитометров по измеряемой величине - ММ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ магнитной навигации подводного аппарата | 2024 |
|
RU2826188C1 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503026C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА КВАДРАТНОЙ КАТУШКИ С ТОКОМ | 2006 |
|
RU2307370C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВНЕШНЕЙ ПОМЕХИ В ЦЕНТРЕ МЕРЫ МАГНИТНОЙ ИНДУКЦИИ | 2008 |
|
RU2394251C1 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2012 |
|
RU2497139C1 |
| ТРЕХКООРДИНАТНЫЙ ИНДУКЦИОННЫЙ МАГНИТОМЕТР С САМОКАЛИБРОВКОЙ | 2020 |
|
RU2751577C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
Изобретение относится к области измерительной техники. Трехкомпонентная мера магнитного момента содержит катушку магнитного момента (ММ), направленного по продольной оси ортогональной системы координат (СК) корпуса катушки цилиндрической формы из немагнитных материалов, и источник постоянного тока I, при этом катушка (площадь - S, количество витков -  ) с током I в ортогональной СК с осями ХК, YК и ZК (с центром в точке 0К на диагонали куба), расположенная в корпусе кубической формы, создает ММ по оси ZК, единичный вектор которого совпадает с направлением диагонали куба корпуса меры, выходящей из одной из вершин его основания, которая одновременно является центром опорной ортогональной СК меры ММ с осями ХМ, YM и ZM (с центром в точке 0М) по соответствующим ребрам куба, с равновеликими значениями составляющих (компонент) MM (Мх, MY, Mz) в СК меры, определяемыми выражением:
) с током I в ортогональной СК с осями ХК, YК и ZК (с центром в точке 0К на диагонали куба), расположенная в корпусе кубической формы, создает ММ по оси ZК, единичный вектор которого совпадает с направлением диагонали куба корпуса меры, выходящей из одной из вершин его основания, которая одновременно является центром опорной ортогональной СК меры ММ с осями ХМ, YM и ZM (с центром в точке 0М) по соответствующим ребрам куба, с равновеликими значениями составляющих (компонент) MM (Мх, MY, Mz) в СК меры, определяемыми выражением:  Технический результат – сокращение времени измерений, повышение точности измерений. 3 ил.
Технический результат – сокращение времени измерений, повышение точности измерений. 3 ил.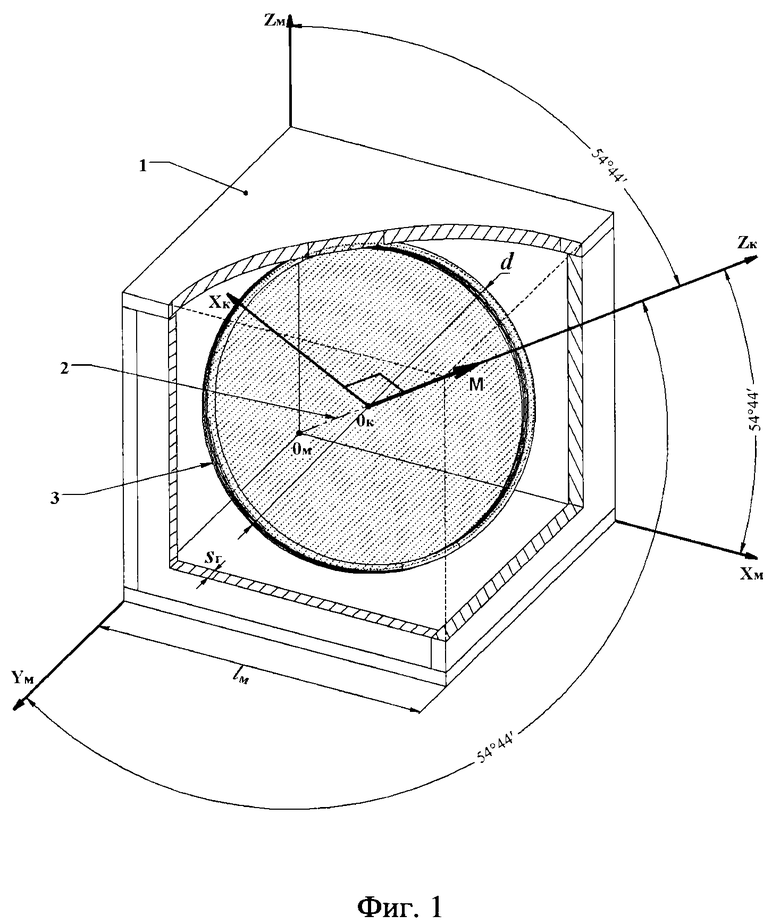
Трехкомпонентная мера магнитного момента, содержащая катушку магнитного момента (ММ), направленного по продольной оси ортогональной системы координат (СК) корпуса катушки цилиндрической формы из немагнитных материалов, и источник постоянного тока I, отличающаяся тем, что катушка (площадь - S, количество витков -  ) с током I в ортогональной СК с осями ХК, YК и ZК (с центром в точке 0К на диагонали куба), расположенная в корпусе кубической формы, создает ММ по оси ZК, единичный вектор которого совпадает с направлением диагонали куба корпуса меры, выходящей из одной из вершин его основания, которая одновременно является центром опорной ортогональной СК меры ММ с осями ХМ, YM и ZM (с центром в точке 0М) по соответствующим ребрам куба, с равновеликими значениями составляющих (компонент) MM (Мх, MY, Mz) в СК меры, определяемыми выражением:
) с током I в ортогональной СК с осями ХК, YК и ZК (с центром в точке 0К на диагонали куба), расположенная в корпусе кубической формы, создает ММ по оси ZК, единичный вектор которого совпадает с направлением диагонали куба корпуса меры, выходящей из одной из вершин его основания, которая одновременно является центром опорной ортогональной СК меры ММ с осями ХМ, YM и ZM (с центром в точке 0М) по соответствующим ребрам куба, с равновеликими значениями составляющих (компонент) MM (Мх, MY, Mz) в СК меры, определяемыми выражением:
| ТРЕХКООРДИНАТНЫЙ ИНДУКЦИОННЫЙ МАГНИТОМЕТР С САМОКАЛИБРОВКОЙ | 2020 |
|
RU2751577C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЛИБРОВОЧНОЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА (ВАРИАНТЫ) | 2003 |
|
RU2262711C2 |
| Трехкомпонентная мера магнитной индукции | 1975 |
|
SU541128A1 |
| CN 105487027 A, 13.04.2016 | |||
| WO 9807043 A1, 19.02.1998. | |||

