Известны устройства для измерения аэродинамических параметров несущих винтов вертолетов, выполненные в виде электрических динамометров и электронных самоуравновешивающихся мостов.
Однако иогрешность измерения от электрических помех очень низкой частоты у этих устройств велика.
Отличительной особенностью описываемого устройства является то, что подавление пepe eнныx составляющих измеряемых электрических сигналов осуществляется введением в измерительно-усилительный блок электронного автоматического моста обратной связи в виде электромеханического -компенсатора, обеспечивающего подачу на вход усилителя переменного электрического сигнала, пропорционального переменным составляющим измеряемого электрического сигнала и находящегося с последним в протизофазе.
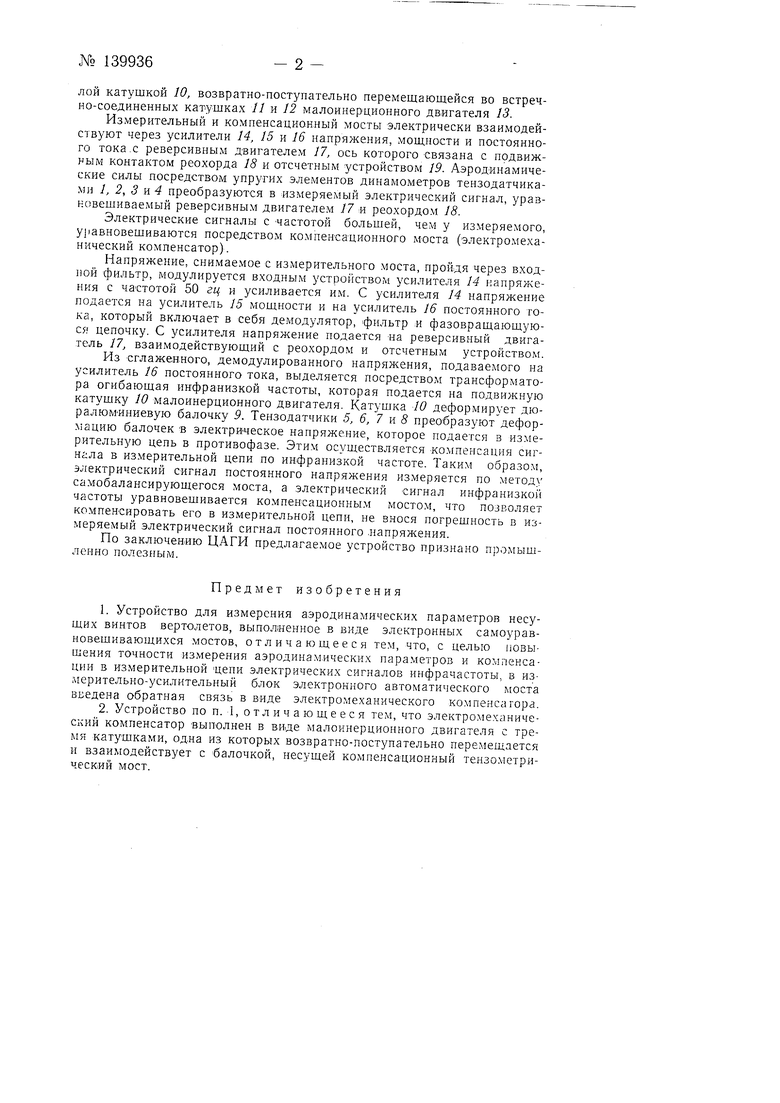
Такая схема устройства с электромеханическим компенсатором, выполненным в виде малоинерционного двигателя с тремя катушками, одна из которых возвратно-поступательно перемещается и взаимодействует с балочкой, несущей кол1пенсационный тензометрический мост, повышает точность измерения аэродинамических .параметров и компенсирует в измерительной цепи электрические сигналы инфрачастоты.
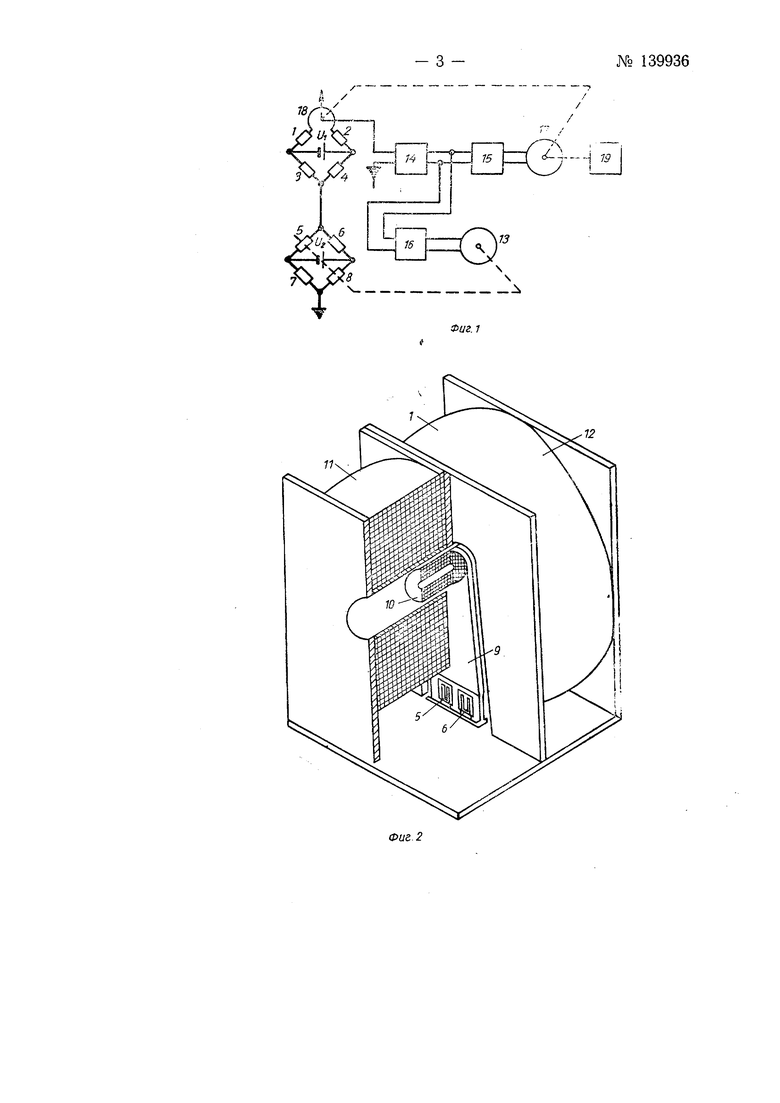
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - электромеханический компенсатор в разрезе; на фиг. 3 - принципиальная схема электромеханического компенсатора.
Измерительный мост, состоящий из тензодатчиков 1, 2, 3 и 4, наклеенных на упругие элементы электрических динамометров, и источника 1 питания, электрически связан с компенсационным мостом, тензометри;еские датчики 5, б, 7 и 8 которого, питаемые источником 2 тока, наклеены на облегченной дюралюминиевой балочке 9, взаимодействующей с ма№ 139936- 2
лой катушкой 10, возвратно-поступательно перемещающейся во встречно-соединенных катушках // и 12 малоинерционного двигателя 13.
Измерительный и компенсационный мосты электрически взаимодействуют через усилители 14, 15 и 16 напряжения, мощности и постоянного тока-С реверсивным двигателем 17, ось которого связана с подвижным контактом реохорда 18 и отсчетным устройством 19. Аэродинамические силы посредством упругих элементов динамометров тензодатчиками 1, 2, 3 и 4 преобразуются в измеряемый электрический сигнал, уравновешиваемый реверсивным двигателем /7 и реохордом J8.
Электрические сигналы с частотой большей, чем у измеряемого, у 1авновешиваются посредством компенсационного моста (электромеханический компенсатор).
Напряжение, снимаемое с измерительного моста, пройдя через входной фильтр, модулируется входным устройством усилителя М напряжения с частотой 50 гц и усиливается им. С усилителя М напряжение подается на усилитель 15 мощности и на усилитель J6 постоянного тока, который включает в себя демодулятор, фильтр ,и фазовращающуюся цепочку. С усилителя напряжение подается на реверсивный двигатель 17, взаимодействующий с реохордом и отсчетным устройством.
Из сглаженного, демодулированного напряжения, подаваемого на усилитель 16 постоянного тока, выделяется посредством трансформатора огибающая инфранизкой частоты, которая подается на подвижную катушку W малоинерционного двигателя. Катушка W деформирует дюралюминиевую балочку 9. Тензодатчики 5, 6, 7 н 8 преобразуют деформацию балочек в электрическое напряжение, которое подается в из.мерительную цепь в противофазе. Этим осуществляется ко.мпенсация сигнала в из.мерительной цепи по инфранизкой частоте. Таким образом, электрический сигнал постоянного напряжения измеряется по методу самобалансирующегося моста, а электрический сигнал инфранизкой частоты уравновешивается компенсационны.м мостом, что позволяет компенсировать его в измерительной цепи, не внося погрешность в измеряемый электрический сигнал постоянного напряжения.
По заключению ЦАГИ предлагаемое устройство признано промышленно полезным.
Предмет изобретения
1.Устройство для измерения аэродинамических параметров несущих винтов вертолетов, выполненное в виде электронных самоуравновешивающихся мостов, отличающееся тем, что, с целью повышения точности из.мерения аэродинамических пара.метров и компенсации в измерительной цепи электрических сигналов инфрачастоты, в измерительно-усилительный блок электронного автоматического моста введена обратная связь в виде электромеханического компенсатора.
2.Устройство по п. 1, отличающееся тем, что электромеханический компенсатор выполнен в виде малоинерционного двигателя с тремя катушка.ми, одна из которых возвратно-поступательно перемещается и взаимодействует с балочкой, несущей компенсационный тензо.метрический мост.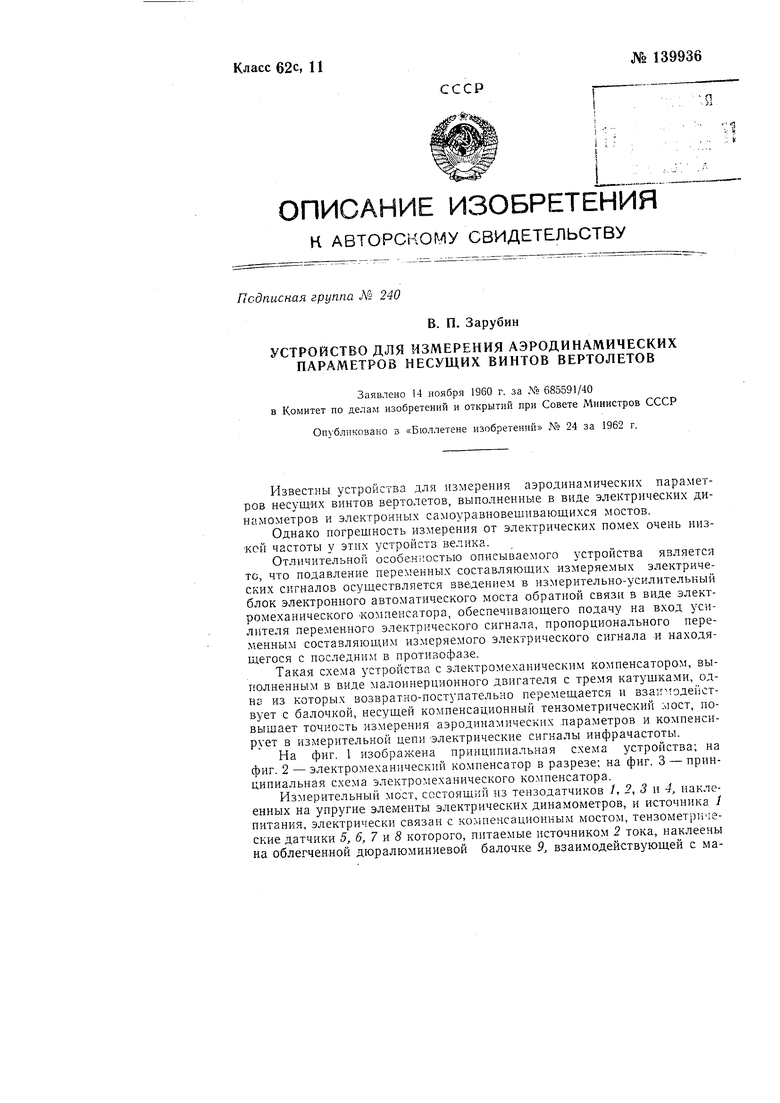
12
U
