со
со ;о
00
sj
Изобретение относится к электротехнике и может быть использовано для управления автономньгм инвертором тока, работающим в режиме прерывно- тых токов.
Целью изобретения является повышение надежности работы.
На фиг, 1 изображена структурная схема устройства, реализующего пред- лагаемый способ; на фиг, 2 - временные диаграммы, поясняющие работу устройства и способ.
Устройство, реализующее способ (фиг,1), содержит датчик 1 выходного напряжения, датчик 2 входного напряжения, коммутатор 3, интегратор 4, формирователь 5 сигнала перехода через О, логический коммутатор 6, распределитель 7 импульсов, формиро- ватель 8 импульсов управления вентилями и задатчик 9 угла опережения.
Значение выходного тока ij инверт тора определяется из выражения
ij ,,.
где и. и измеренные значения входного и выходного напряжений}
LJ- индуктивность входно-
го реактора.
Для сохранения стабильного выходного напряжения инвертора при изменении нагрузки в режиме прерьгоистых токов вентили необходимо включить в момент появления входного тока, вычисленного по указанному выражению,
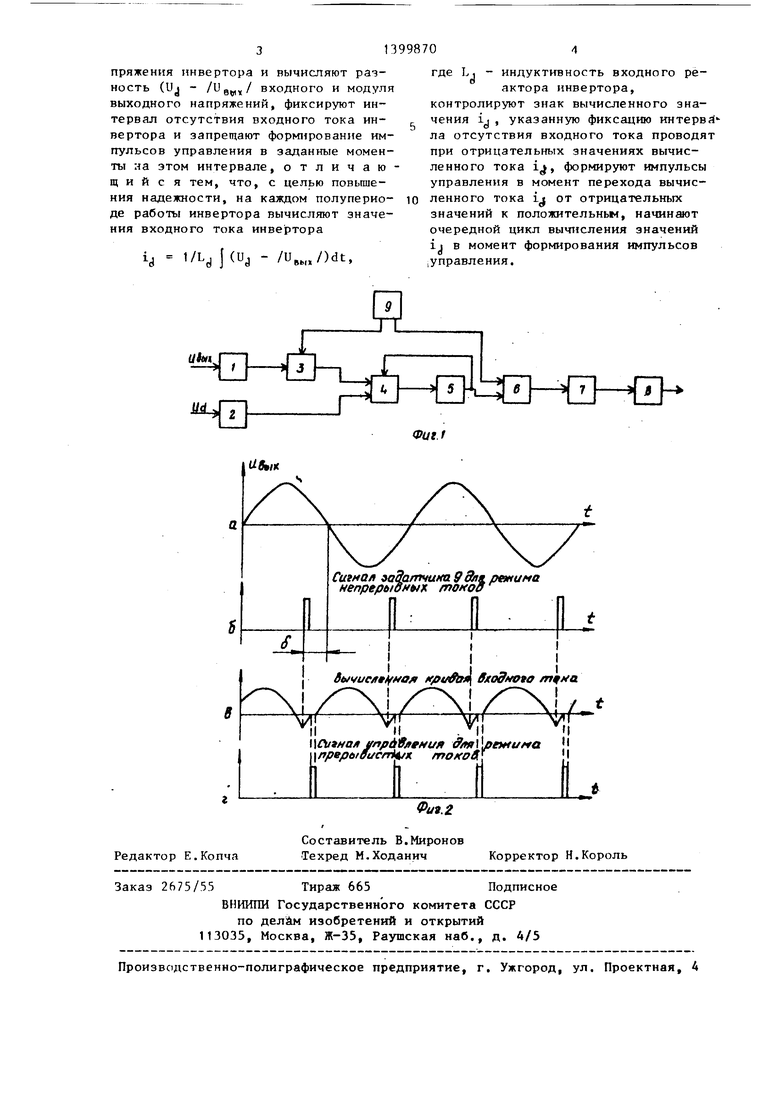
В режиме непрерьшного тока импульсы управления формируются в заданные моменты времени с опережением по от- ношению к и (фиг,2а,б), Для повьш1е ния надежности работы инвертора и стабилизации выходного напряжения в режиме прерывистых токов импульсы управления следует формировать в мо- менты, когда вычисленная величина ii переходит через нулевое значение и становится положительной (фиг,2в,г При выполнении этого условия величина ij, когда она положительна, равна входному току, а отрицательное значение ij соответствует бестоковой пауз
Устройство, реализующее предлагаемый способ, работает следующим образом.
Сигналы с датчика 1 через коммутатор 3 и с датчика 2 поступают на входы интегратора 4, Коммутатор 3 обеспечивает подачу на вход интегратора выходного напряжения U,, н течение положительного полупериода выходного тока и отрицательного значения выходного напряжения в течение отрицательного полупериода выходного тока. Коммутатор 3 управляется сигналом задатчика 9, который формирует сигнал, определяющий угол опережения S , заданный для режима непрерьшноГо тока (фиг,2б), В режиме прерывистого тока задатчик 9 управляет работой коммутатора, В режиме непрерывных токов коммутатор 6 пропускает сигналы задатчика 9 на распределитель 7 и дальше на формирователь 8.
Интегратор 4 вычисляет входной ток ij, причем часть кривой, расположенная ниже оси абсцисс, соответствует бестоковой паузе. Формирователь 5 фиксирует момент появления отрицательного значения ij и запрещает прохождение сигналов задатчика 9 через коммутатор 6, В момент перехода значений ij от отрицательных значений к положительные формирователь 5 формирует сигнал управления (фиг,2г) для режима прерывистых токов, который, пройдя через коммутатор 6, распределитель 7 и формирователь 8, поступает на очередную группу вентилей в виде импульсов управления. Этот же сигнал устанавливает интегратор 4 в О и фиксирует начало очередного цикла интегрирования.
При увеличении тока нагрузки кривая ij (фиг,2в) поднимается вверх относительно оси времени, что приводит к уменьшению интервала между сигналами задатчика 9 (фиг,26) и формирователя 5 (фиг.2г). При переходе к непрерывному току ij коммутатор 6 вновь пропускает на распределитель 7 сигналы задатчика 9,.
Таким образом, момент появления входного тока определяется путем вычисления его кривой, в связи с чем отпадает необходимость в использовании датчика тока. Это позволяет упростить схему устройства, реализующего предлагаемый способ, что также повышает надежность. Формула изобретения
Способ управления инвертором тока заключающийся в том, что задают моменты формирования импульсов управления в режиме непрерывного тока и формируют импульсы управления, измеряют входное Uj и выходное Uд, напряжения инвертора и вычисляют разность (Uj - ,/ входного и модуля выходного напряжений, фиксируют интервал отсутствия входного тока инвертора и запрещают формирование импульсов управления в заданные моменты на этом интервале, отличающийся тем, что, с целью повышения надежности, на каждом полупериоде работы инвертора вычисляют значения входного тока инвертора
ij 1/Lj j(Uj - /U,,,,/)dt,
где Lj - индуктивность входного реактора инвертора,
контролируют знак вычисленного значения ij , указанную фиксацию интерв ла отсутствия входного тока проводят при отрицательных значениях вычисленного тока i, формируют импульсы управления в момент перехода вычис- ленного тока ij от отрицательных значений к положительные, начинают очередной цикл вычисления значений ij в момент формирования импульсов .управления.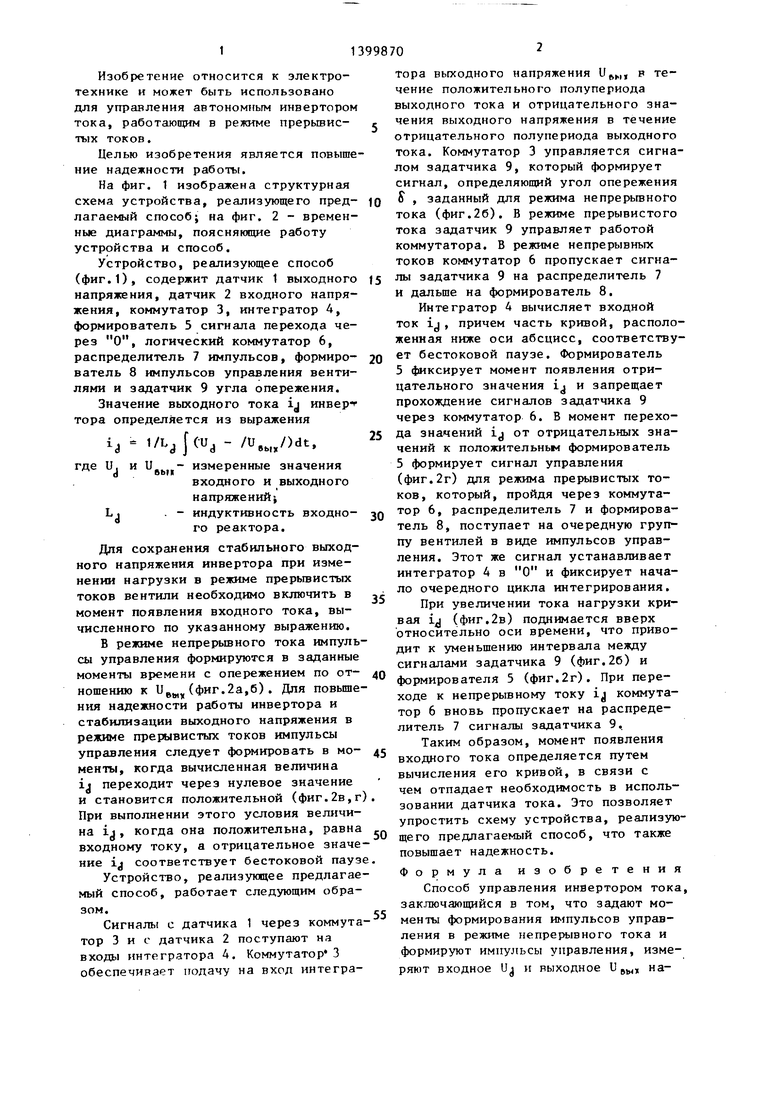
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования угла запаса ведомого сетью инвертора | 1983 |
|
SU1270852A1 |
| Способ управления инвертором тока | 1989 |
|
SU1728949A1 |
| Устройство для управления преобразователем частоты со звеном постоянного тока | 1986 |
|
SU1525841A1 |
| Устройство для управления инвертором | 1984 |
|
SU1259446A2 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ ТОКА | 1972 |
|
SU421099A1 |
| Вентильный двигатель | 1988 |
|
SU1594658A1 |
| Устройство для управления преобразователем постоянного тока со звеном переменного тока | 1984 |
|
SU1264272A1 |
| Устройство для управления регулируемым мостовым инвертором напряжения | 1984 |
|
SU1239809A1 |
| Инфузионный насос | 1982 |
|
SU1099967A1 |
| Вентильный двигатель | 1989 |
|
SU1693695A1 |
Изобретение относится к электротехнике и может быть использовано для управления инвертором тока, работающим в режиме прерывистых токов. Цель изобретения - повышение надежности. Дпя сохранения стабильного выходного напряжения инвертора при изменении нагрузки в режиме преры- вистьЬс токов вентили включают в момент появления входного тока. Момент появления входного тока определяется путем вычисления его кривой. 2 ил. (Л
Uhn
Сигнал 9adam4uifa 9 Зая peiHUffo непрерывны) тоноо
II
I I I
Sb/vuc/retftfOfl fffti/( exo9ffO9O /nfffa
JJiJT}-fT
Фиг f
t I
II
I I
fffti/( exo9ffO9O /nff
| Руденко B.C., Сенько В.И., Чиженко И.М | |||
| Основы преобразовательной техники | |||
| М.: Высшая школа, 1980, с | |||
| Способ модулирования для радиотелефонии | 1923 |
|
SU409A1 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ ТОКА | 1972 |
|
SU421099A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
