Л7
tsD
С/5 00 СД
Изобретение относится к сельскому хозяйству, в частности к устройствам для изучения поведения копытных животных, например коров, во время выпаса и стойлового содержания.
Цель изобретения повыгаёние достоверности результатов намерения времени нижнего и верхнего положения головы животного путем увеличения разрешающей способности датчика положения, а также исключения ложных сра- батьшаний.
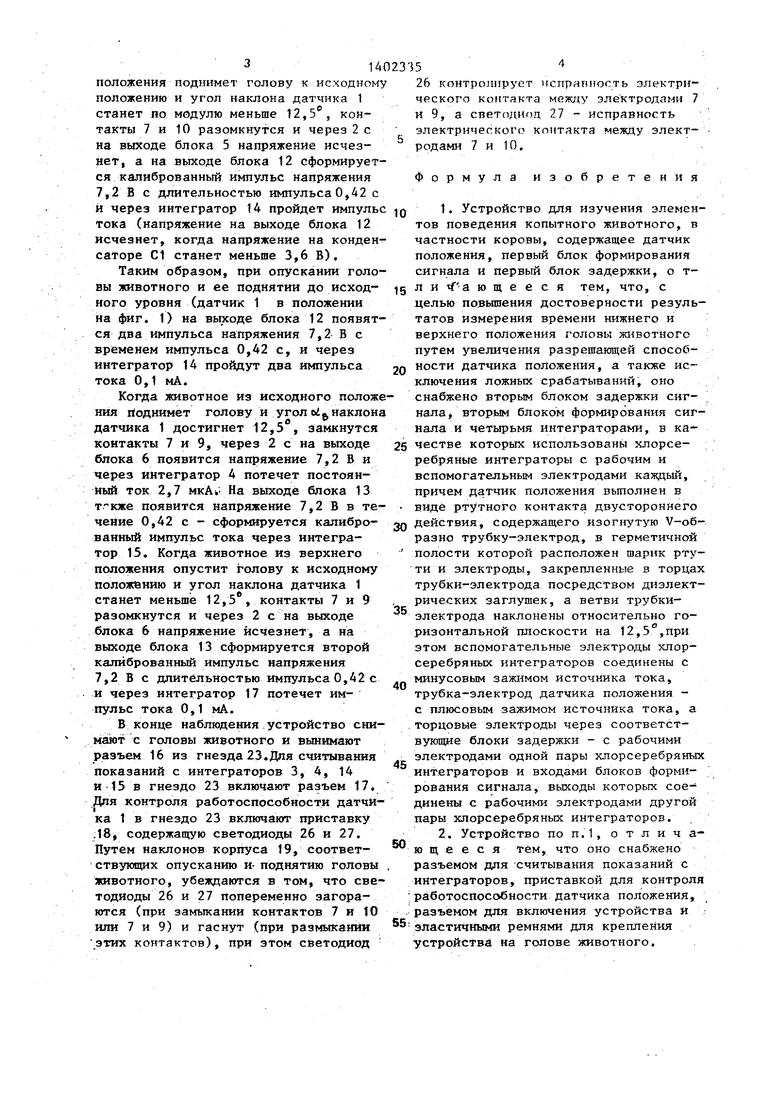
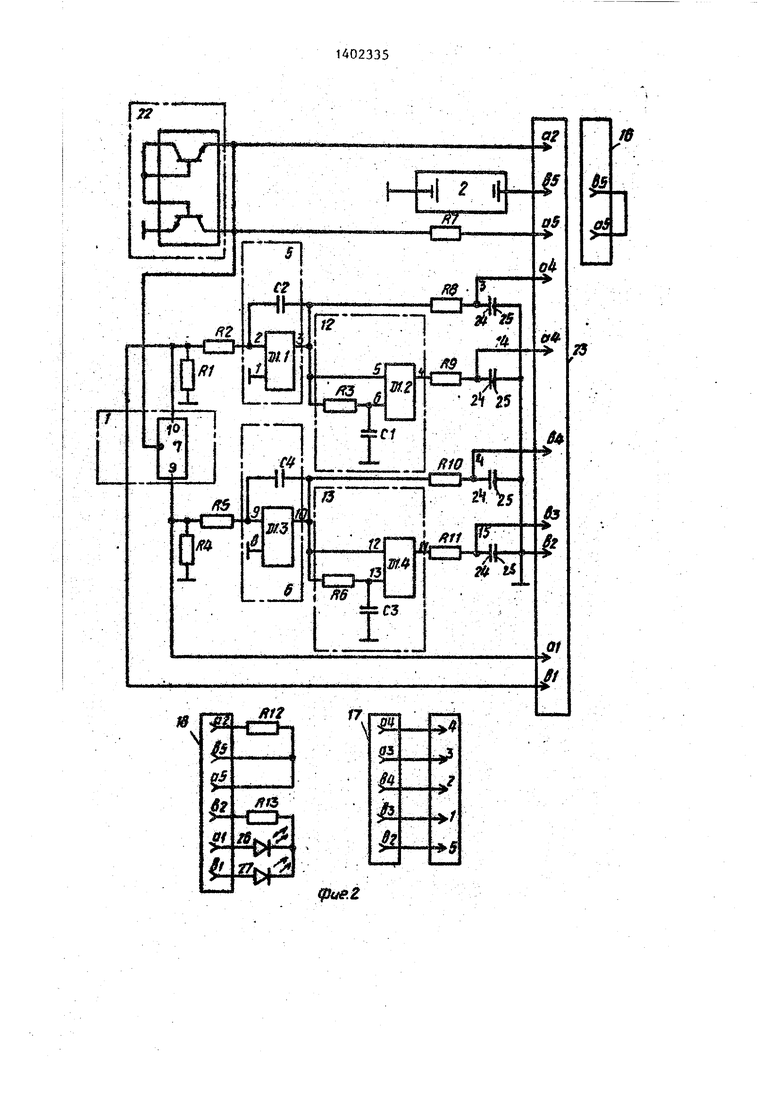
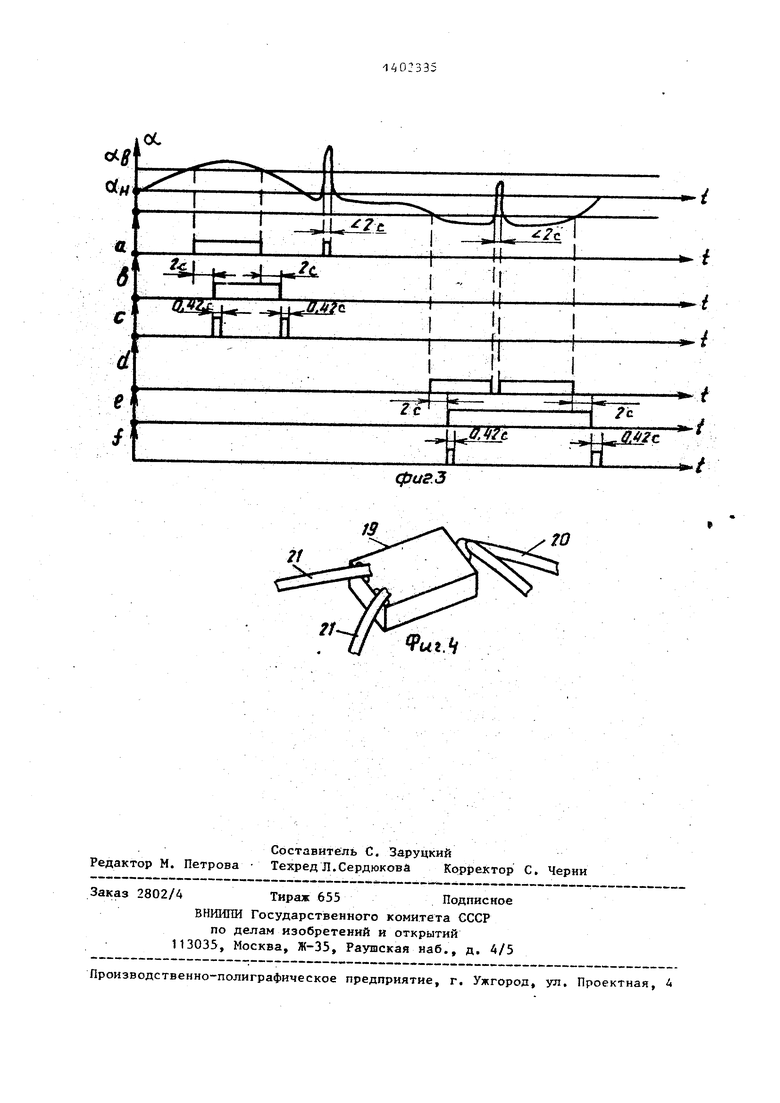
На фиг. 1 показана блок-схема устройства с датчиком положения; на фиг. 2 - принципиальная электрическая схема устройства с разъемами и приставкой для контроля; на фиг. 3 - график изменения положения дат чика .положений, закрепленного на голове животного (верхняя кривая) и эпюры сигнала в точках а,Ь,с , , е , i (фиг. 1) j на фиг. 4 - корпус устрор ства с ремнями для его закрепления на голове животного.
Устройство для изучения элементов поведения копытного животного содержит датчик 1 положения головы животного, источник 2 тока и электрохими- ческие интеграторы 3 и 4, при этом iодин электрод каждого интегратора 3, 4 соединен с первым выходным зажимом источника 2 тока, а второй - с вто рым выходным зажимом источника 2 тока через датчик 1 положения.
Устройство снабжено блоками 5 и 6 задержки сигнала. Б качестве интеграторов 3 и 4 использованы хлорсеребря- ные интеграторы. Датчик 1 положения вьтолнен в виде ртутного контакта |двустороннего действия, содержащего изогнутую Д7-образно трубку-электрод 7, в герметичной полости которой расположен шарик 8 ртути и электроды 9 и 10, закрепленные в торцах трубки- электрода 7 посредством диэлектрических заглушек 11, а ветви трубки-электрода наклонены относительно горизонтальной плоскости на 12,5. Устройство содержит блоки 12 и 13 формирования калиброванных импульсов и два дополнительных хлорсеребряных интегратора 14 и 15, при этом один электрод каждого интегратора 14, 15 соединен с минусовым зажимом источника 2 тока, а другой - с выходами соответствующих блоков 5 и 6 задержки сигнала через блоки 12 и 13 формирования калиброванных импульсов (одновибраo
5
0
5
0
5
0
5
0
5
торы). Устройство снабжено разъемом 16 для включения схемы, разъемом 17 для считывания показаний с интеграторов 3,4, 14 и 15 и приставкой 18 для контроля работоспособности датчика 1 положения. Все элементы устройства размещены в герметичном корпусе 19 с эластичными ремнями 20 и 21 для крепления корпуса 19 на голове животного, при этом задний ремень 20 предназначен для охвата шеи, а два передних ремня 21 - для закрепления на рогах животного.
Блок питания содержит стабилизатор
22напряжения, собранный на транзисторах К1НТ591А (фиг. 2). Устройство имеет гнездо 23 для включения разъемов 16 и 17 и приставки 18. Оно смонтировано на печатной плате и помещено в пластмассовый корпус 19. Изгиб трубки 7 характеризуется углом о4/2, равным 22,5. Хлорсеребряный интегратор типа ИХС-3-400 имеет рабочий электрод 24 из серебра и вспомогательный электрод 25, на который нанесен хлорид серебра. Приставка 18 содержит светодиоды 26 и 27.
Устройство работает следующим образом.
Включение устройства происходит путем установки разъема 16 в гнездо
23- источник 2 тока (Крона с напряжением 9В) подключается к схеме. Напряжение источника 2 тока подается на стабилизатор 22 - источник эталонного напряжения 7,2В. Корпус 19 с элементами устройства закрепляют, на голове животного с помощью ремней 20 и 21, при этом корпус 19 лежит, например, на. лбу коровы, а датчик 1 положения ориентирован относительно горизонтальной поверхности так, как показано на фиг. 1. Когда животное опускает голову и угол наклона датчика 1 достигает 12,5, замыкаются электроды 7 И 10. Через 2с на выходе блока появится напряжение 7,2В
и через интегратор 3 потечет постоям-- ный Ток 2,7 мкА, на выходе блока 12 (элемента ИСКЛЮЧАЮЩЕЕ ИЛИ) также появится напряжение. 7,2 В. После того, как напряжение на конденсаторе С1 (при его заряде через резистор R3) превысит 3,6 В, на выходе блока 12 напряжение исчезнет - сформируется калиброванный импульс тока через интегратор 14 с длительностью импульса 0,42 с. Когда животное из нижнего
31402335
положения поднимет голову к исходному 26 контролирует испрапиость злектри- положению и угол наклона датчика 1 ческого контакта между электродами 7 станет ио модулю меньше 12,5, кон- и 9, а светодиод 27 - исправность такты 7 и 10 разомкнутся и через 2 с электрического контакта между элект- на выходе блока 5 напряжение исчез- родами 7 и 10, нет, а на выходе блока 12 сформируется калиброванный импульс напряжения Формула изобретения 7,2 В с длительностью и шульса 0,42 с
и через интегратор 14 пройдет импульс Q 1. Устройство для изучения злемен- тока (напряжение на выходе блока 12 тов поведения копытного животного, в исчезнет, когда напряжение на конден частности коровы, содержащее датчик саторе С1 станет меньше 3,6 В), положения, первый блок формирования
Таким образом, при опускании голо- сигнала и первый блок задержки, о т- вы животного и ее поднятии до исход- п а к т. е е. с. я тем, что, с кого уровня (датчик 1 в положении целью повышения достоверности резуль- на фиг. 1) на выходе блока 12 появят- татов измерения времени нижнего и ся два импульса напряжения 7,2 В с верхнего положения головы животного вр1еменем импульса 0,42 с, и через путем увеличения разрешающей способ- интегратор 14 пройдут два импульса 20 датчика положения, а также истока 0,1 мА.ключения ложных срабатываний, оно
Когда животное из исходного положа- снабжено вторым блоком задержки сиг- ния йоднимет голову и уголoi наклона нала, вторым блоком формирования сиг- датчика 1 достигнет 12,5, замкнутся нала и четырьмя интеграторами, в ка- контакты 7 и 9, через 2 с на выходе 25 честве которых использованы хлорсе- блока 6 появится напряжение 7,2 В и ребряные интеграторы с рабочим и через интегратор 4 потечет постоян- вспомогательным электродами каждый, Ный ток 2,7 мкАь На выходе блока 13 причем датчик положения вьтолнен в появится напряжение 7,2 В в те- виде ртутного контакта двустороннего чение 0,42 с - сформируется калибро- gg действия, содержащего изогн тую V-об- ванный Импульс тока через интегра- разно трубку-электрод, в герметичной тор 15, Когда животное из верхнего полости которой расположен шарик рту- положения опустит голову к исходному ти и электроды, закрепленные в торцах положению и угол наклона датчика 1 трубки-электрода посредством диэлект- станет меньше 12,5 , контакты 7 и 9 . рических заглушек, а ветви трубки- разомкнутся и через 2 с на выходе электрода наклонены относительно го- блока 6 напряжение исчезнет, а на ризонтальной плоскости на 12,5°,при выходе блока 13 сформируется второй этом вспомогательные электроды хлор- калйброванный импульс напряжения серебряных интеграторов соединены с 7,2 В с длительностью импульса 0,42 с минусовым зажимом источника тока, и через интегратор 17 потечет им- трубка-электрод датчика положения - пульс тока 0,1 мА.с плюсовым зажимом источника тока, а
В конце наблкздения.устройство сни- торцовые электроды через соответст- мают с головы животного и вынимают вующие блоки задержки - с рабочими разъем 16 из гнезда 23.Для считывания электродами одной пары хлорсеребряных показаний с интеграторов 3, 4, 14 интеграторов и входами блоков форми- н-15 в гнездо 23 включают разъем 17, рования сигнала, выходы которых сое- Дпя контроля работоспособности датчИ- динены с рабочими электродами другой ка 1 в гнездо 23 включают приставку пары хлорсеребряных интеграторов. .18, содержащую светодиоды 26 и 27. 2. Устройство по п.1, о т л и ч а- Путем наклонов корпуса 19, соответ- ю щ е е с я тем, что оно снабжено ствующих опусканию и- поднятию головы , разъемом для считывания показаний с животного, убеждаются в том, что све- интеграторов, приставкой для контроля тодйоды 26 и 27 попеременно загора- работоспособности датчика положения, ются (при замыкании контактов 7 и 10 разъемом для включения устройства и или 7 и 9) и гаснут (при размыкании 5 эластичньми ремнями для крепления этих контактов), при зТом светодиод устройства на голове животного.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изучения элементов поведения животного | 1988 |
|
SU1523133A1 |
| Устройство для регистрации двигательной активности головы животного | 1988 |
|
SU1646530A1 |
| Устройство для регистрации двигательной активности животного | 1986 |
|
SU1412679A1 |
| Устройство для контроля режимов работы машин | 1980 |
|
SU862159A1 |
| Устройство для контроля нагрузок машин | 1983 |
|
SU1088041A2 |
| Устройство для определения средних значений сигналов | 1976 |
|
SU591876A1 |
| Устройство для контроля нагрузок машин | 1983 |
|
SU1088040A1 |
| Устройство для контроля режимов работы машин | 1981 |
|
SU972537A1 |
| Устройство для исследования движений гидробионта | 1986 |
|
SU1340697A1 |
| Устройство для контроля режимовРАбОТы МАшиН | 1977 |
|
SU842882A1 |
Изобретение относится к сельскому хозяйству. Цель изобретения - повышение достоверности результатов измерения времени нижнего и верхнего положения головы животного путем увеличения разрешающей способности дат-. чика положения, а также исключения ложных срабатываний. Устройство содержит датчик 1 положения головы животного и цепи измерения времени нахождения датчика 1 в одном из фиксирован-, ных положений. Датчик 1 выполнен в виде ртутного контакта двустороннего действия. Он содержит изогнутую V-образно трубку-электрод 7. В герметичной полости трубки-электрода 7 расположен шарик 8 ртути и электроды 9 и 10. При наклоне головы ивотного на угол более 12,5 относительно горизонтального положения замьЕкается од- на из цепей измерения. Время нахождения головы животного в одном из фик- с рованных положений регистрируется посредством хлорсеребряных интеграторов 3,4,14,15. Зафиксированное . время считывается с помощью специального разъема. 1 з.п. ф-лы, 4 ил. SG (/)
N
hriH
г
/f&
1
$.
щ
«puf.Z
r
м
A
M
5
7/
фие.з
иг
| Устройство для оповещения об опастности при выполнении человеком трудовых операций | 1982 |
|
SU1062083A1 |
