8 10 гггв ;g
30 12 Зг 28 ZSt 34 25 3
П 33
N
о
00 4:
3
31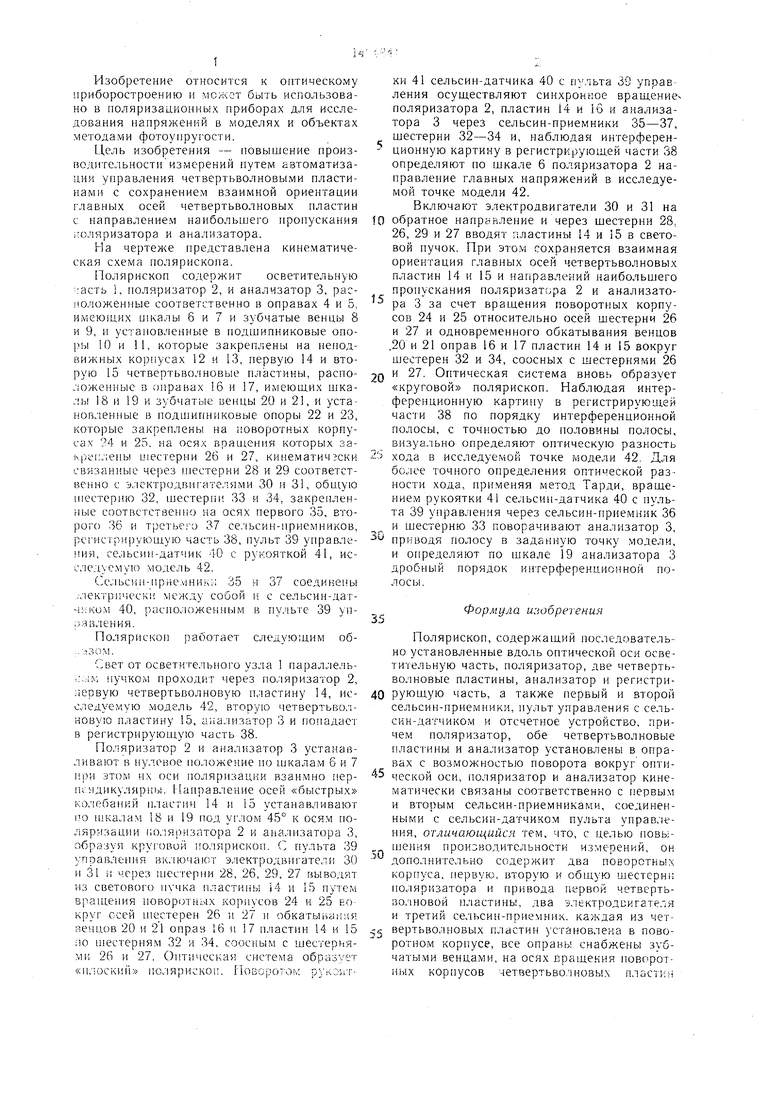
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЯРИСКОП ОТРАЖЕННОГО СВЕТА | 1973 |
|
SU363865A1 |
| ПОЛЯРИСКОП | 1992 |
|
RU2020525C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ОПТИЧЕСКОЙ РАЗНОСТИ ХОДА В ОПТИЧЕСКИ АКТИВНЫХ | 1973 |
|
SU370508A1 |
| Поляриметр | 1971 |
|
SU443300A1 |
| Поляризационно-оптическое устройстводля ОпРЕдЕлЕНия НАпРяжЕНий | 1979 |
|
SU844999A1 |
| ПОЛЯРИСКОП ШАХТНЫЙ КОМПАКТНЫЙ | 2014 |
|
RU2587101C2 |
| Полярископ | 1991 |
|
SU1793416A1 |
| Поляриметр | 1971 |
|
SU488121A1 |
| Устройство для измерения остаточных напряжений в стекле | 1980 |
|
SU948905A1 |
| Полярископ | 1948 |
|
SU84102A1 |
Изобретение относится к оптическому приборостроению и может быть использовано в поляризационных приборах для исследования напряжений методами фотоупругости. Цель изобретения - повышение производительности измерений путем автоматизации управления четвертьволновыми пластинами с сохранением взаимной ориентации осей пропускания поляризатора, анализатора и четвертьволновых пластин. В ноля- рископе поляризатор 2, четвертьволновые пластины 14 и 15 и анализатор 3 установлены в имеющих возможность поворота вокруг оптической оси оправах 4, 5, 16 и 17. Эти оправы снабжены зубчатыми венцами 8, 9, 20 и 21. Поляризатор 2 и первая пластина 14 кинематически связаны через общую inec- терню 32 с первым сельсин-приемником 36. Анализатор 3 и вторая пластина 15 через шестерни связаны соответственно с вторым 36 и третьим 37 сельсин-приемника.ми. Пластины 14 и 15 установлены на поворотных корпусах 24 и 25. Оси вращения корпусов 24 и 25 имеют шестерни 26 и 27, кинематически связанные соответственно с первым 30 и вторым 31 электродвигателями. Общая HjecTep- ня 32 поляризатора 2 и первой пластины 14 и шестерни 26 и 27 соосны. Сельсин-приемники 35-37 и электродвигатели-30 и 31 управляются с пульта 39 управления. Сельсин- приемники 35-37 управляются сельсин- датчиком 40. 1 ил. (Л
Изобретение относится к оптическому приборостроению и можот быть использовано в поляризационных приборах для исследования напряжений в моделях и объектах методами фотоунругости.
Цель изобретения - повышение производительности измерений нутем автоматизации управления четвертьволновыми пластинами с сохранением взаимной ориентации главных осей четвертьволновых пластин с направлением наибольшего пропускания поляризатора и анализатора.
Ыа чертеже представлена кинематическая схема полярископа.
Полярископ содержит осветительную :асть 1, поляризатор 2, и анализатор 3, расположенные соответственно в оправах 4 и 5, имеющих и1калы б и 7 и зубчатые венцы 8 и 9, и установленные в подшипниковые опоры К) и 11, которые закреплены на неподвижных корпусах 12 и 13, первую 14 и вторую 15 четвертьволновые пластины, распо- -ложенные в оправах 16 и 17, имеющих щка- лы 18 и 19 и зубчатые венцы 20 и 21, и установленные в подшипниковые опоры 22 и 23, которые закреплены на поворотных корпусах 4 и 25, на осях вращения которых за- кре ;лены ьместерни 26 и 27, кинематичгски связанные через шестерни 28 и 29 соответственно с электродвигателями 30 и 31, общую П1естерню 32, шестер1 и 33 и 34, закрепленные соответственно на осях первого 35, второго 36 и третьего 37 се, 1ьсин-прие.мников, pei-истрирующую часть 38, пульт 39 управления, сельсин-датчик 40 с рукояткой 41, ис- модель 42.
Сельсин-приемник;; 35 и 37 соединены . лектрически между собой li с сельсин-дат- 41-пчом 40, расположенным в пульте 39 уп- :;авления.
Полярископ работает следующим об..:-ЗОМ.
Свет от осветительного узла 1 параллель- ,:.. 1м нучко;ч проходит через поляризатор 2, ;1ервую четвертьволновую пластину 14, исследуемую модель 42, вторую четвертьволновую пластину 15, аиа:1изатор 3 и попадает в регистрируюп ую часть 38.
По.чяризатор 2 и анализатор 3 устанавливают в нулевое положение по нжалам 6 и 7 этом их оси поляризации взаимно пер- U ндикуляр1 ы. Направление осей «быстрых колебаний пластин 14 и 15 устанавливают по п калам 18 и 19 под углом 45° к осям поляризации поляризатора 2 и анализатора 3, образуя круговой иоляриско. С пу.льта 39 управления вк.чючают электродвигателя 30 и 31 it чс)ез шестерни 28, 26, 29, 27 выводят из светового пласти11Ы 14 и 15 путем вращения новоротных корпусов 24 и 25 ко- круг осей niecTepen 26 и 27 и обкатыву:::1Я iseunoB 20 и 21 оправ 16 и 17 пластин 14 и 15 по шестерням 32 и 34, соосным с шестернями 26 и 27. С)нтичес;-;ая система образч ет
«ПЛОСКИ11 полярископ. ПоВОрО7 ОМ pyKOliTки 41 сельсин-датчика 40 с пульта 39 управ ления осуществляют синхронное вращение- поляризатора 2, пластин 14 и 16 и анализатора 3 через сельсин-приемники 35-37, щестерни 32-34 и, наблюдая интерференционную картину в регистрирующей части 38 определяют по щкале 6 поляризатора 2 направление главных напряжений в исследуемой точке модели 42.
Включают электродвигатели 30 и 31 на
o обратное напракление и через шестерни 28, 26, 29 и 27 вводят пластины 14 и 15 в световой пучок. При этом сохраняется взаимная ориентация главных осей четвертьволновых пластин 14 и 15 и направлений наибольщего пропускания поляризатора 2 и анализато ра 3 за счет вращения поворотных корпусов 24 и 25 относительно осей щестерни 26 и 27 и одновременного обкатывания венцов .20 и 21 оправ 16 и 17 пластин 14 и 15 вокруг шестерен 32 и 34, соосных с щестернями 26
Q и 27. Оптическая система вновь образует «круговой полярископ. Наблюдая интерференционную картину в регистрирующей части 38 по порядку интерференционной полосы, с точностью до половины полосы, визуально определяют оптическую разность
хода в исследуемой точке модели 42. Для более точного определения оптической разности хода, применяя метод Тарди, вращением рукоятки 41 сельсип-датчика 40 с пульта 39 управления через сельсин-приемник 36 и щестерню 33 поворачивают анализатор 3, приводя полосу в заданную точку модели, и определяют по шкале 19 анализатора 3 дробный порядок интерференционной полосы.
и
35
Формула изобретения
U,
Полярископ, содержащий последовательно установленные вдоль оптической оси осветительную часть, поляризатор, две четвертьволновые пластины, анализатор и регистрирующую часть, а также первый и второй сельсин-приемники, нульт управления с сельсин-датчиком и отсчетное устройство, причем поляризатор, обе четвертьволновые пластины и анализатор установлены в оправах с возможностью поворота вокруг оптической оси, юляризатор и анализатор кинематически связаны соответственно с первым и вторым сельсин-приемниками, соединенными с сельсин-датчиком пульта управления, отличающийся тем, что, с целью повыщения производительности измерений, он
дополнительно содержит два поворотных корпуса, первую, вторую и общую шестерни поляризатора и привода первой четверть- 15олповой пластины, два электродвигателя и третий се,тьсин-приемпик. каждая из четвертьволновых пластин установлена в поворотном корпусе, все оправы снабжены зубчатыми венцами, на осях вращения новоротных корпусов четвертьволновых пластян
закреплены по одной шестерне, кине у1ати- чески связанной с соответствующим электродвигателем, каждый из которых соединен с пультом управления, оправы поляризатора и первой четвертьволновой пластины посредством зубчатого зацепления их зубчатых венцов с общей щестерней связаны с первым сельсин-приемником, оправа второй четерть- волновой пластины посредством зубчатого зацеплении связана с третьим сельсин-приемником, соединенным с се.чьсин-датчиком пульта управления, при этом общая nsecTop- ня поляризатора и первой четвергьволно1Ю| 1 пластины установлена соосно с шестерней привода поворотного корпуса этой пластины, а щестерня привода второй четвертьволновой пластины установ. 1ена соосно с щестерней привода ее поворотного корпуса, причем первый и третий сельсин-приемники соеди иены.
| Новые поляризационные методы и приборы для исследования напряженно-деформированного состояния и анализа состава и молекулярной структуры вендества | |||
| Л., 1984, с | |||
| Поляризационно-оптический метод исследования напряжений.-М.: Наука, 1965, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
