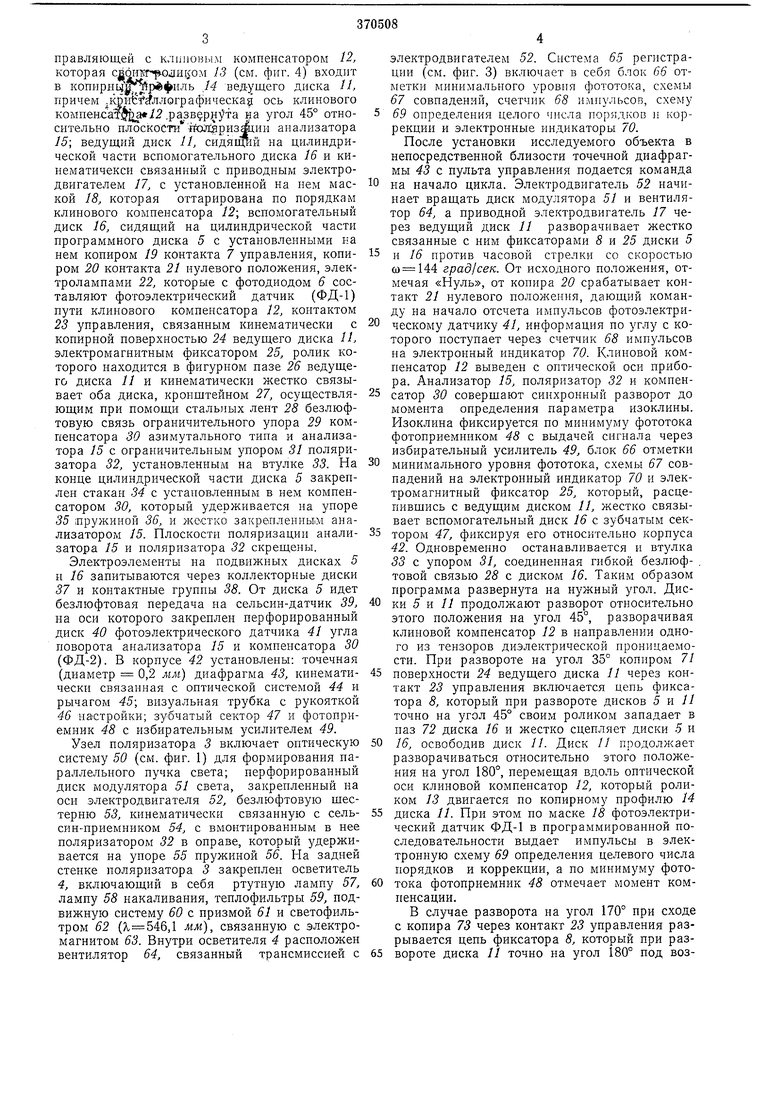
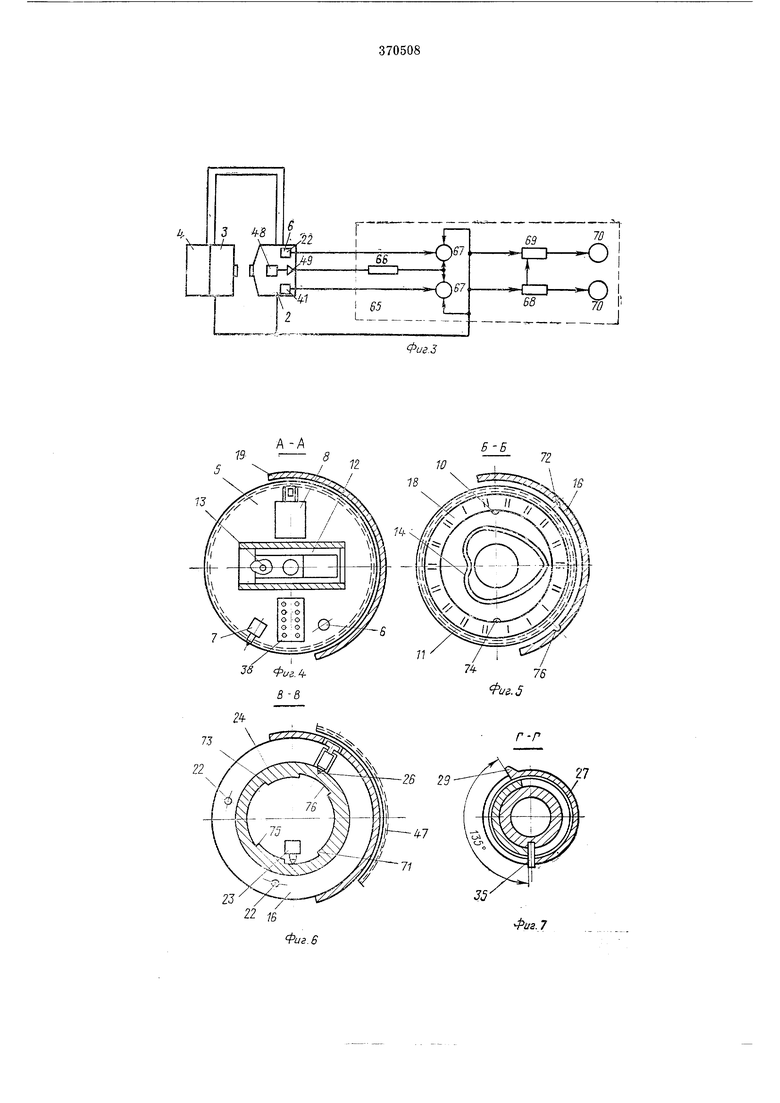
правляющей с клиновым компенсатором 12, которая cgQirer ojHKOM 13 (см. фиг. 4) входит в копирнц р филь 14 ведущего диска 11, причем 1фи(;таллографическад ось клинового компен-сат..развер:н} та на угол 45° относительно плоскости яоДяризАии анализатора 15; ведущий диск 11, сидящий на цилиндрической части вспомогательного диска 16 и кинематичексп связанный с приводным электродвигателем 17, с установленной на нем маской 18, которая оттарирована по порядкам клинового компенсатора 12; вспомогательный диск 16, сидящий на цилиндрической части программного диска 5 с установленными на нем копиром 19 контакта 7 управления, копиром 20 контакта 21 нулевого положения, электролампами 22, которые с фотодиодом 6 составляют фотоэлектрический датчик (ФД-1) пути клинового компенсатора 12, контактом 23 управления, связанным кинематически с коппрной поверхностью 24 ведущего диска 1L электромагнитным фиксатором 25, ролик которого находится в фигурном пазе 26 ведущего диска // и кинематически жестко связывает оба диска, кронщтейном 27, осуществляющим при помощи стальных лент 28 безлюфтовую связь ограничительного упора 29 компенсатора 30 азимутального типа и анализатора 15 с ограничительным упором 31 поляризатора 32, установленным на втулке 33. На конце цилиндрической части диска 5 закреплен стакан 34 с установленным в нем компенсатором 30, который удерживается на упоре 35 пружиной 36, и жестко закрепленным анализатором 15. Плоскости поляризации анализатора 15 и поляризатора 32 скрещены.
Электроэлементы на подвижных дисках 5 и 16 запитываются через коллекторные диски 37 и контактные группы 38. От диска 5 идет безлюфтовая передача на сельсин-датчик 39, на оси которого закреплен перфорированный диск 40 фотоэлектрического датчика 41 угла поворота анализатора 15 и компенсатора 30 (ФД-2). В корпусе 42 установлены: точечная (диаметр 0,2 мм) диафрагма 43, кинематически связанная с оптической системой 44 и рычагом 45; визуальная трубка с рукояткой 46 настройки; зубчатый сектОр 47 и фотоприемник 48 с избирательным усилителем 49.
Узел поляризатора 3 включает оптическую систему 50 (см. фиг. 1) для формирования параллельного пучка света; перфорированный диск модулятора 51 света, закрепленный на оси электродвигателя 52, безлюфтовую щестерню 53, кинематически связанную с сельсин-приемником 54, с вмонтированным в нее поляризатором 32 в оправе, который удерживается на упоре 55 пружиной 56. На задней стенке поляризатора 5 закреплен осветитель 4, включающий в себя ртутную лампу 57, лампу 58 накаливания, теплофильтры 59, подвижную систему 60 с призмой 61 и светофильтром 62 (t-546,1 мм), связанную с электромагнитом 63. Внутри осветителя 4 расположен вентилятор 64, связанный трансмиссией с
электродвигателем 52. Система 65 регистрации (см. фиг. 3) включает в себя блок 66 отметки минимального уровня фототока, схемы 67 совпадений, счетчик 68 импульсов, схему 69 определения целого числа порядков и коррекции и электронные индикаторы 70.
После установки исследуемого объекта в непосредственной близости точечной диафрагмы 43 с пульта управления подается команда
на начало цикла. Электродвигатель 52 начинает вращать диск модулятора 51 и вентилятор 64, а приводной электродвигатель 17 через ведущий диск 11 разворачивает жестко связанные с ним фиксаторами 8 и 25 диски 5
и 16 против часовой стрелки со скоростью ci)144 град/сек. От исходного положения, отмечая «Нуль, от копира 20 срабатывает контакт 21 нулевого положения, дающий команду на начало отсчета импульсов фотоэлектрическому датчику 41, информация по углу с которого поступает через счетчик 68 импульсов на электронный индикатор 70. Клиновой компенсатор 12 выведен с оптической оси прибора. Анализатор 15, поляризатор 32 и компенсатор 30 соверщают синхронный разворот до момента определения параметра изоклины. Изоклина фиксируется по минимуму фототока фотоприемником 48 с выдачей сигнала через избирательный усилитель 49, блок 66 отметки
минимального уровня фототока, схемы 67 совпадений на электронный индикатор 70 и электромагнитный фиксатор 25, который, расцепивщись с ведущим диском 11, жестко связывает вспомогательный диск 16 с зубчатым сектором 47, фиксируя его относительно корпуса 42. Одновременно останавливается и втулка 33 с упором 31, соединенная гибкой безлюфтовой связью 28 с диском 16. Таким образом программа развернута на нужный угол. Диски 5 и 11 продолжают разворот относительно этого положения на угол 45°, разворачивая клиновой компенсатор 12 в направлении одного из тензоров диэлектрической ироницаемости. При развороте на угол 35° копиром 71
поверхности 24 ведущего диска 11 через контакт 23 управления включается цепь фиксатора 8, который при развороте дисков 5 и // точно на угол 45° своим роликом западает в паз 72 диска 16 и жестко сцепляет диски 5 и
16, освободив диск //. Диск // продолл-сает разворачиваться относительно этого положения на угол 180°, перемещая вдоль оптической оси клиновой компенсатор 12, который роликом 13 двигается по копирному профилю 14
диска 11. При этом по маске 18 фотоэлектрический датчик ФД-1 в программированной последовательности выдает имиульсы в электронную схему 69 определения целевого числа порядков и коррекции, а по минимуму фототока фотоприемник 48 отмечает момент компенсации.
В случае разворота на угол 170° при сходе с копира 75 через контакт 23 управления разрывается цепь фиксатора 8, который при развороте диска /) точно на угол 180° под воздействием пружины 9 западает своим роликом в паз 74 и жестко сцепляет диски 5 и }1, освободившись от диска 16. Диски продолжают разворот относительно этого положения на угол 90°, переводя клиновой компенсатор }2 в направление второго тензора диэлектрической проницаемости. При развороте на угол 80° копир 75 диска П через контакт 23 задействует цепь фиксатора 8, который при развороте дисков точно на угол 90° западает своим роликом в паз 76 и жестко сцепляет диски 5 и 16, освободив диск 11. Последний продолжает разворачиваться относительно этого положения на угол 180°, компенсируя обратным ходом клинового компенсатора 12 в направлении второго тензора диэлектрической проницаемости.
В случае разворота на угол 170° при сходе с копира 76 через контакт 23 управления подается команда в осветитель 4 электромагниту 63 на перемещение системы 60 в верхнее крайнее положение: переключается источник света (лампа 58 выключается, а лампа 57 через призму 61 освещает исследуемый объект), а также разрывается цепь фиксатора 8, который при развороте диска 11 точно на угол 180° западает своим роликом в паз 10 и жестко сцепляет диски 5 и 11, освободившись от диска 16. В этот момент компенсатор 30 и синхронно разворачиваемый от этого с помощью сельсинной связи поляризатор 32 встают на жесткие упоры, соответственно 29 и 31, которые входят в систему диска 16 и ъ данный момент зафиксированы относительно корпуса 42. Диски 5 и 11 продолжают разворачиваться относительно этого положения на угол 180°; при этом анализатор 15 вращается, определяя дробную часть порядка. В момент начала данного цикла контакт 7 управления набегает на копир 19 диска 16, сигнализируя о постановке компенсатора 30 и поляризатора 32 на упор, и дает команду на отсчет импульсов фотоэлектрическим датчиком 41.
Минимум освещенности фиксируется фотоприемником 48 с выдачей на электронный индикатор 70. Когда диски 5 и 11 развернутся точно на угол 180°, контакт управления 7 сходит с копира 19, сигнализирует об окончании цикла измерений, обесточивая электромагнит 63 (система 60 возвращается в исходное положение), и дает команду на реверс электродвигателю 17. Так как диск // к моменту компенсации опередил на угол 360° диск 5, они оказываются в положении, соответствующем
исходному, после чего реверснруют на угол 315°, снимая компенсатор 30 и поляризатор 32 с упоров 29 и 3 и приводя их в исходное полол ение. При развороте на угол 180° контакт 7 управления, сойдя с копира 19, дает
команду на обесточивание цепи фиксатора 25, который при развороте дисков точно на угол 315° расцепляется с корпусом 42, западает своим роликом в паз 26 и сцепляет диски 16 и 11.
Таким образом, все три диска - 5, 11 и 16- сцеплены между собой и относительно этого положения разворачиваются до того момента, когда контакт 21 сойдет с копира 20 и отключит приводной электродвигатель 17; цикл
окончен, система находится в начальном положенни и подготовлена к следующему циклу.
Предмет изобретения
Устройство для автоматического определения оптической разности хода в оптически активных материалах, содержащее источники света, модулятор света, поляризатор, оптические датчики угла разворота и перемещений,
клиновой компенсатор, компенсатор азнмутального типа, например Сенармона, и анализатор, отличающееся тем, что, с целью повышения надежности устройства, оно снабл ено исполнительным механизмом, на котором непосредственно размещены оптическне датчики угла разворота и перемещений, клиновой компенсатор, компенсатор азимутального типа и анализатор, причем исполнительный механизм связан с системой задачи электромеханической программы.
8 59 ei ь2 57 50
606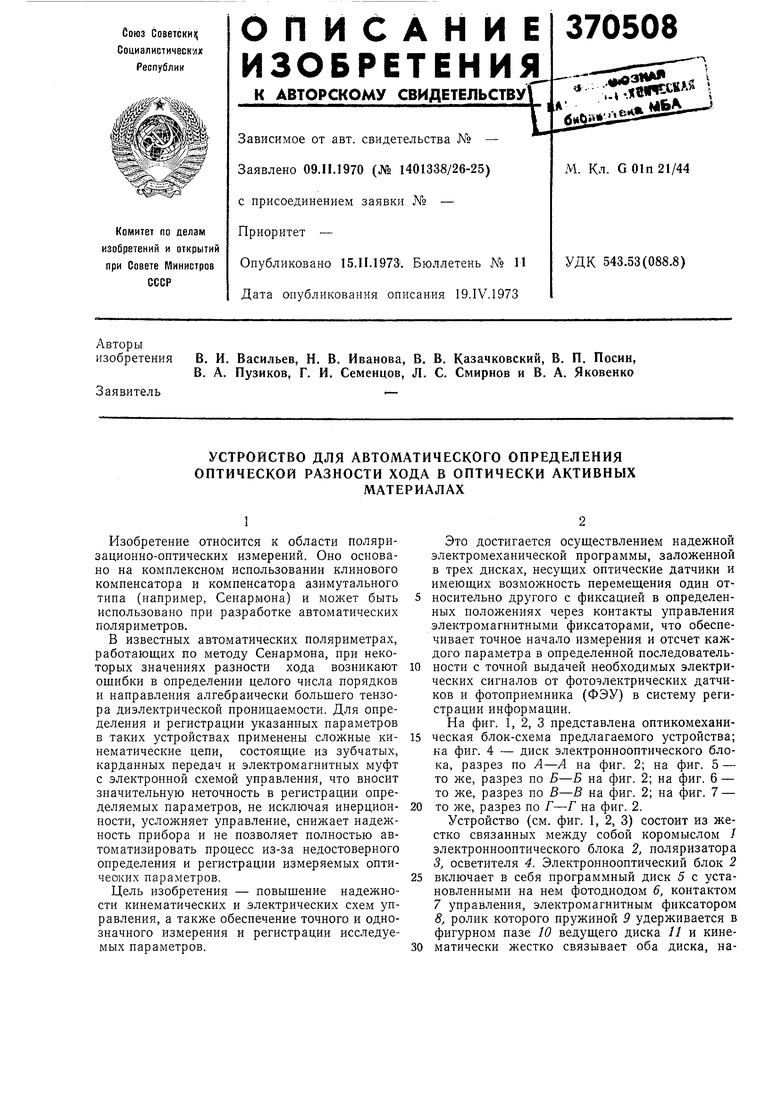
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИЧЕСКОЙ РАЗНОСТИ ХОДА МЕТОДОМ СЕНАРМОНА | 1971 |
|
SU322747A1 |
| Поляриметр | 1971 |
|
SU443300A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВРАЩЕНИЯ ПЛОСКОСТИ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ФОТОЭЛЕКТРИЧЕСКИЙ ПОЛЯРИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2088896C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА | 2011 |
|
RU2461798C1 |
| Фотоэлектрический преобразователь угла поворота вала в код | 1976 |
|
SU652593A1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ КОММУТАЦИИ КОЛЛЕКТОРНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 2008 |
|
RU2383030C2 |
| СПОСОБ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ОПТИЧЕСКИ АКТИВНЫХ ВЕЩЕСТВ В МУТНЫХ РАСТВОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325630C1 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| Делительное устройство | 1987 |
|
SU1425044A1 |
| ПОЛЯРИМЕТРИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ВЗАИМНОГО РАЗВОРОТА | 1992 |
|
RU2047836C1 |
A 1
5 10 2 1S 25 21
/5 9 26 7 20
jr
/ .-.4.,
B .
28 29
JO 36 2
Д5
S
J
