Изобретение относится к системам управления приводом промышленного робота и может быть использовано при создании гибких автоматизированных производств с применением электромеханических манипуляторов.
Целью изобретения является обеспечение возможности оптимального по быстродействию позиционирования манипулятора.
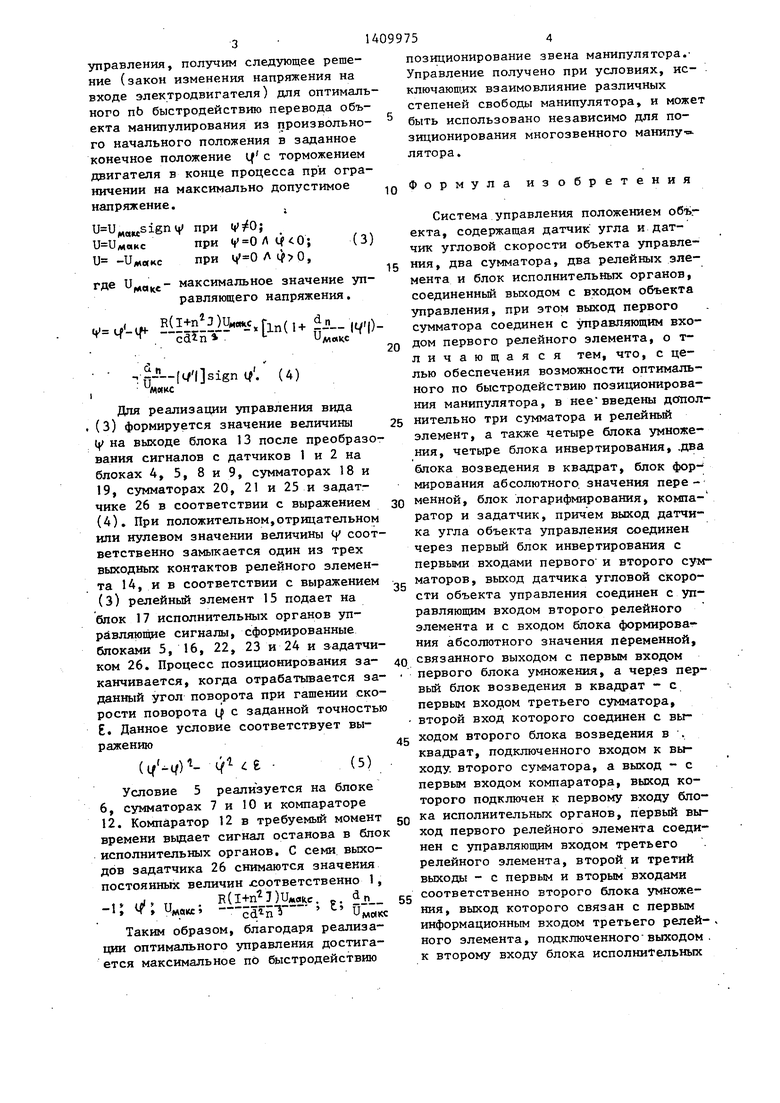
На чертеже изображена схема системы управления положением объекта.
Система содержит датчик 1 угла и датчик 2 угловой скорости, установленные на манипуляторе 3 и соединенные соответственно с. блоком А инвертирования и с релейным элементом 5, вход которого соединен через блок 6 возведения в квадрат с первым входом сумматора 7 и через блок 8 формирования абсолютного значения переменной - с первым входом блока 9 умножения. Выход блока 4 связан через первый вход сумматора 10 с блоком 1Гвозведе ния в квадрат, который связан через второй вход сумматора 7 с первым входом компаратора 2. Выход блока 4 соединен также через первый вход сумматора 13 с управляющим входом релейного элемента 14, первьй выход которого связан с управляющим входом релейного элемента 15, а второй и третий выходы - соответственно с первым и вторым входами блока 16 умножения, Выход блока 16 соединен через первый информационный вход релейного элемента 15 с блоком 17 исполнительных органов , который соединен также с выходом компаратора 12. Выход блока 9 связан через первый вход сумматора 18 с блоком 19 логарифмирования, выход которого через первый вход сумматора 20 соединен с первым входом блока 21 умножения. Второй и третий входы блока 21 подключены соответственно к первому и второму выходам релейного элемента 5 и через инверторы 22 и 23 соответственно - к первому и второму входу блока 24 умножения. Выход блока 21 соединен с вторым входом сумматора 13, Второй вход блока 20 связан через инвертор 25 с выходом блока 9, а задатчик 26 подключен к вторым входам блоков 9, 10, 12 и 18, к первому и второму информационным входам релейных элементов 5 и 14, к третьим входам блоков 13, 16 и 24 и к четвертому входу блока 21.
0
5
0
5
Все использованные конструктивные блоки являются стандартными, а вычислительные блоки строятся согласно схемам типовых операторов.
Система автоматического управления положением фузпсционирует следующим образом.
Объектом 3 управления является электромеханическая система, состоящая из звена антропоморфного манипулятора, вращающегося вокруг неподвижной оси, и привода, осуществляющего управление этой, системой. Блок 17 исполнительных органов включает электродвигатель постоянного тока с независимым возбуждением и редуктор. Управление осуществляется изменением напряжения, подаваемого на обмотку якоря электродвигателя. Движение рассматриваемой системы описывается дифференциальными уравнениями
,2 т ..ti
()), , L g +R.+dnli U; ci.
(1) (2)
0
5
0
5
0
где i - ток в цепи якоря;
и - управляющее напряжение; I - момент инерции звена манипулятора относительно оси вращения ;
Л - момент инерции якоря электродвигателя и вращающихся частей редуктора; jU - момент электромагнитных сил,
приложенных к якорю; п - передаточное число редуктора;L и R - индуктивность и омическое
сопротивление обмотки якоря соответственно;
d и с - постоянные, являющиеся техническими параметрами электродвигателя;
Cf - угол поворота звена манипулятора.
Для больщинства электродвигателей, используемых в промьптенных роботах, время установления тока в цепи якоря много меньше времени выхода на стационарный режим вращения якоря и много меньше времени транспортной операции, выполняемой манипулятором. В терминах параметров системы это означает, что при расчетах в уравнении - (2) можно пренебречь индуктивностью обмотки якоря и положить ,
Применяя для предлагаемой системы известные методы теории оптимального
управления, получим следующее решение {закон изменения напряжения на входе электродвигателя) для оптимального пЬ быстродействию перевода объекта манипулирования из произвольного начального положения в заданное конечное положение ц с торможением двигателя в конце процесса при ограничении на максимально допустимое напряжение.
i
,sign4 при itf/O;
,KC при ОЛ1.0; (3)
и -UM«KC при Л ,
где максимальное значение управляющего напряжения.
Система управления положением объ,- екта, содержащая датчик угла и датчик угловой скорости объекта управле- 15 ния, два сумматора, два релейных зле- мента и блок исполнительных органов, соединенный выходом с входом объекта управления, при этом выход первого
Ч Ч -ф- -1--2- - хГ1п( 1+ ---()- сумматора соединен с управляющим вхоСи П UjMoiicC
JWOIKC
20
дом первого релейного элемента, о т- личающаяся тем, что, с целью обеспечения возможности оптимального по быстродействию позиционирования манипулятора, в нее введены допол-,.(t/ | signi; . (4)
:U
ММКС
дом первого релейного элемента, о т- личающаяся тем, что, с целью обеспечения возможности оптимального по быстродействию позиционирования манипулятора, в нее введены допол
25 нительно три сумматора и релейный
элемент, а также четыре блока умножения, четьфе блока инвертирования, .два блока возведения в квадрат, блок формирования абсолютного, значения пере30 менной, блок логарифмирования, компаратор и задатчик, причем выход датчика угла объекта управления соединен через первый блок инвертирования с первыми входами первого и второго сумДля реализации управления вида . (3) формируется значение величины ц/ на выходе блока 13 после преобразования сигналов с датчиков 1 и 2 на блоках 4, 5, 8 и 9, сумматорах 18 и 19, сумматорах 20, 21 и 25 и задат- чике 26 в соответствии с выражением (4), При положительном,отрицательном или нулевом значении величины Ц соответственно замыкается один из трех выходных контактов релейного элемента 1А, и в соответствии с выражением -g маторов, выход датчика угловой скоро- (З) релейный элемент 15 подает на сти объекта управления соединен с управляющим входом второго релейного элемента и с входом блока формирования абсолютного значения переменной, 40 связанного выходом с первым входом первого блока умножения, а через пер- вьй блок возведения в квадрат - с первым вхо;9ом третьего сумматора, второй вход которого соединен с вы- 45 ходом второго блока возведения в . квадрат, подключенного входом к выходу, второго сумматора, а выход - с первым входом компаратора, выход которого подключен к первому входу бло12. Компаратор 12 в требуемый момент 50 исполнительных органов, первый вы- времени вьодает сигнал останова в блок ход первого релейного элемента соедиблок 17 исполнительных органов уп- равлякндие сигналы, сформированные блоками 5, 16, 22, 23 и 24 и задатчи- ком 26. Процесс позиционирования заканчивается, когда отрабатывается заданный угол поворота при гащении скорости поворота ц с заданной точностью . Данное условие соответствует выражению
() ч/ i - (5)
Условие 5 реализуется на блоке 6, сумматорах 7 и 10 и компараторе
позиционирование звена манипулятора.- Управление получено при условиях, исключающих взаимовлияние различных степеней свободы манипулятора, и может быть использовано независимо для позиционирования многозвенного манипу- - лятора.
Формула изобретения
Система управления положением объ,- екта, содержащая датчик угла и датчик угловой скорости объекта управле- ния, два сумматора, два релейных зле- мента и блок исполнительных органов, соединенный выходом с входом объекта управления, при этом выход первого
сумматора соединен с управляющим вхо
дом первого релейного элемента, о т- личающаяся тем, что, с целью обеспечения возможности оптимального по быстродействию позиционирования манипулятора, в нее введены дополнительно три сумматора и релейный
элемент, а также четыре блока умножения, четьфе блока инвертирования, .два блока возведения в квадрат, блок формирования абсолютного, значения переменной, блок логарифмирования, компа ратор и задатчик, причем выход датчика угла объекта управления соединен через первый блок инвертирования с первыми входами первого и второго сумматоров, выход датчика угловой скоро- сти объекта управления соединен с управляющим входом второго релейного элемента и с входом блока формирования абсолютного значения переменной, связанного выходом с первым входом первого блока умножения, а через пер- вьй блок возведения в квадрат - с первым вхо;9ом третьего сумматора, второй вход которого соединен с вы- ходом второго блока возведения в . квадрат, подключенного входом к выходу, второго сумматора, а выход - с первым входом компаратора, выход которого подключен к первому входу бло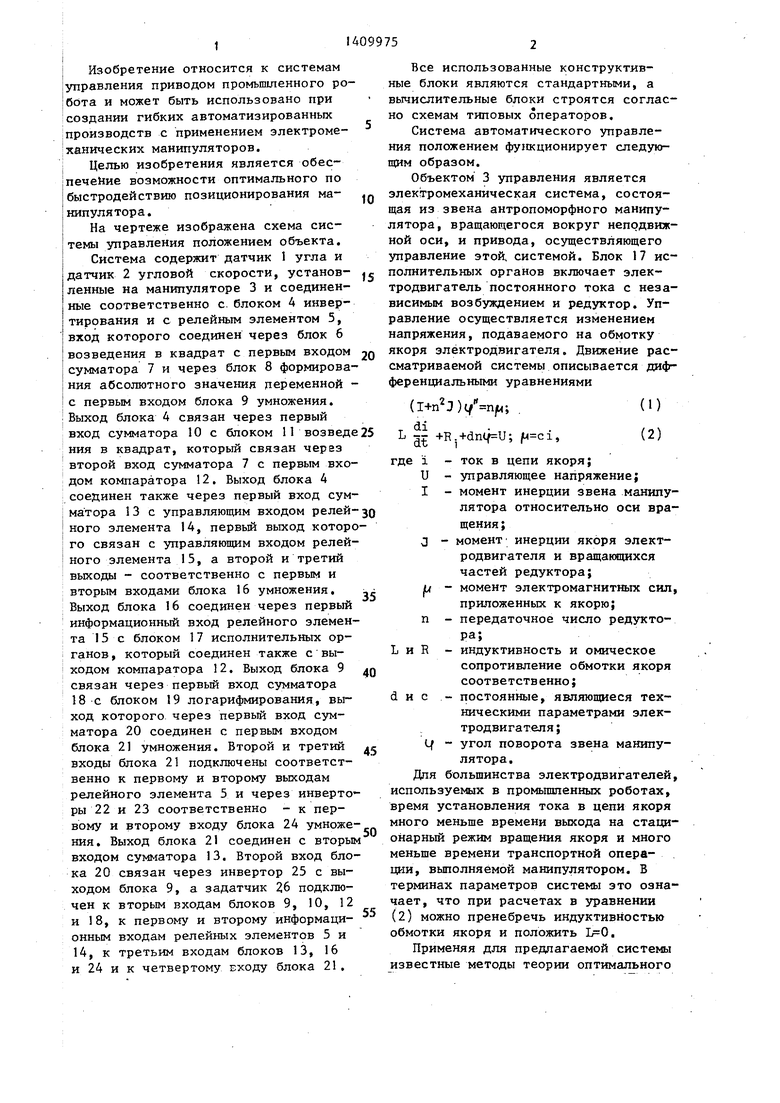
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления положением объекта | 1989 |
|
SU1620996A2 |
| Устройство для управления приводом манипулятора | 1990 |
|
SU1821356A1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631784C1 |
| Регулятор мощности дуговой электропечи | 1984 |
|
SU1264379A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2228257C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2311284C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2325268C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2147276C1 |
Изобретение относится к системам управления приводом промьшшенного робота и может быть использовано при создании гибких автоматизированных производств с применением электромеханических манипуляторов. Цель изобретения - обеспечение возг-южнос- ти оптимального по быстродействию позиционирования манипулятора, Дпя достижения поставленной цели в систему дополнительно введены три сумматора и релейный элемент, а также четьфе блока умножения,, четыре блока инвертирования, два блока возведение в квадрат, блок формирования абсолютного значения переменной, блок лога- рифмирования, компаратор и задатчик. 1 ил. о да 
исполнительных органов, С семи выходов задатчика 26 снимаются значения постоянных величин соответственно 1, ,, , . R()UMc,fcc. р. 1. Ч и„а«, и„«кс Таким образом, благодаря реализации оптимального управления достигается максимальное по быстродействию
55
йен с управляющим входом третьего релейного элемента, второй и третий выходы - с первым и вторым входами соответственно второго блока умножения, выход которого связан с первым информационным входом третьего релей- ного элемента, подключенного выходом . к второму входу блока исполнительных
органовj первый и второй выходы второго релейного элемента соединены со- отватственно с первым и вторым входами третьего блока умножения и через второй и третий блоки инвертирования - с первым и вторым входами четвертого блока умножения, выход которого связан с вторым информационным входом третьего релейного элемента9 выход первого блока умножения соединен с первым входом четвертого сумматора и через четвертый блок инвертирования с первым входом пятого сумматора , второй вход которого подключен к выходу блока логарифмирования, соединенного входом с вьосодом четвертого сумматора, а выход - к третьему входу третьего блока умножения, вы
10
15
6
ход которого связан с вторым входом первого сумматора, причем ; ервьгй выход задатчика связан, с первыми информационными входами первого и второго релейных элементов и с вторым входом четвертого сумматора, второй выход - с вторыми информационными входами первого и второго релейных элементов, третий выход - с вторым входом второго сумматора и с третьим входом первого сумматора, четвертый выкод - с третьими входами второго и четвертого блоков умножения, пятый, шестой и седьмой выходы - соответственно с четвертым входом третьего блока умножения и с вторыми входами компаратора и первого блока умножения .
