Изобретение относится к системам управления приводом промышленного робота, может быть использовано при создании гибких автоматизированных производств с применением электромеханических манипуляторов и является дополнительным к основному авт. св. № 1409975.
Целью изобретения является повышение точности системы.
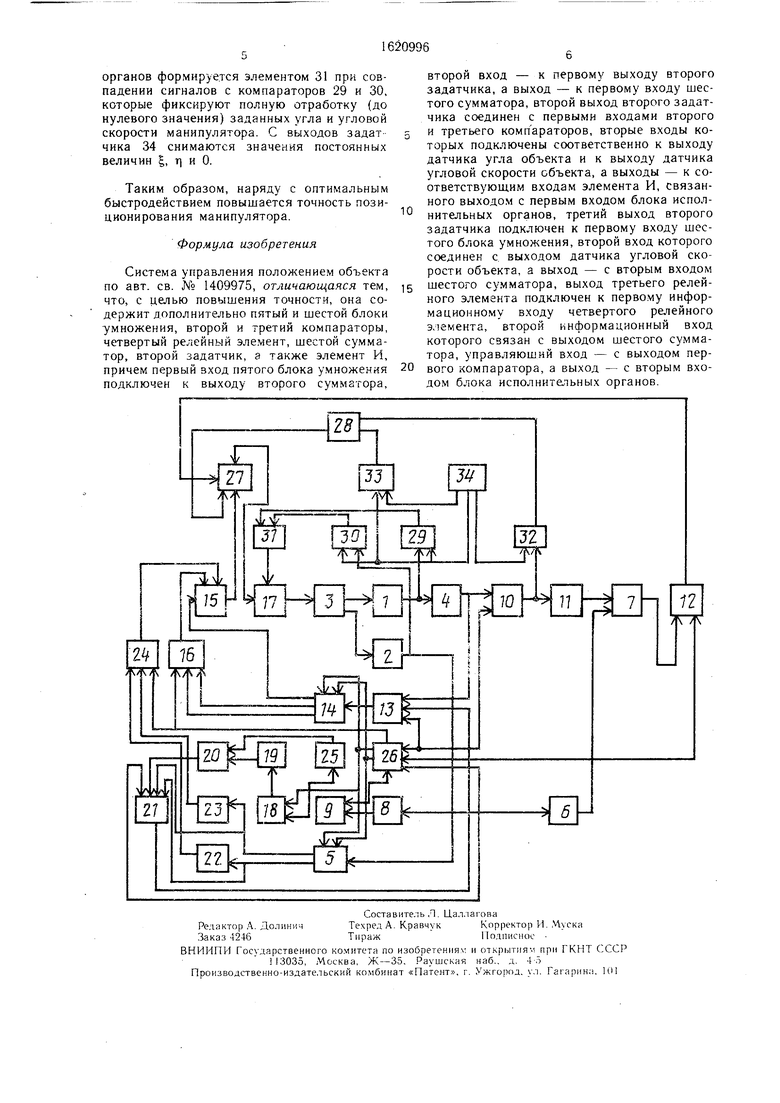
На чертеже изображена функциональная схема предложенной системы управления положением объекта.
Система содержит датчик 1 угла и датчик 2 угловой скорости, установленные на манипуляторе 3 и соединенные соответственно с блоком 4 инвертирования и с релейным элементом 5, вход которого соединен через блок 6 возведения в квадрат с первым входом сумматора 7 и через блок 8 формирования абсолютного значения переменной - с первым входом блока 9 умножения. Выход блока 4 связан через первый вход сумматора 10 с блоком 11 возведения в квадрат, который связан через второй вход сумматора 7 с первым входом компаратора 12. Выход
блока 4 соединен также через первый вход сумматора 13 с управляющим входом релейного элемента 14, первый которого связан с управляющим входом релейного элемента 15, а второй и третий выходы - соответственно с первым и i-п JJILIM входами блока 16 умножения. Выход Г.юка 16 соединен с первым информационным входом релейного элемента 15, имеющего выход на блок 17 исполнительных органов. Выход блока 9 связан через первый вход сумматора 18 с блоком 19 логарифмирования, выход которого через первый вход сумматора 20 соединен с первым входом блока 21 умножения. Второй и третий входы блока 21 подключены соответственно к первому и второму выходам релейного элемента 5 и через инверторы 22 и 23 соответственно к первому и второму входу блока 24 умно.е.-шя. Выход блока 21 соединен со вю:- -л- .,ом сумматора 13. Второй вход JO . зязэн через инвертор 25 с выходом блока 9, i задатчик 26 подключен ко вторым входам бликов 9, 10. 12 и 18, к первому и вгоро.гл информационным входам релейных элементов 5 и 14, к
(Л
О5 N3
О СО
со о
ю
третьим вхо. пм блоков 13, 16 и 24 и к четвертому входу блока 21. Выходы блоков 12 и 15 соединены соответственно с управляющим и одним из информационных входов релейного элемента 27, другой информационный вход которого связан с выходом сумматора 28. Датчики 1 и 2 соединены соответственно с одними из входов компараторов 29 и 30, выходы которых связаны с элементом И 31, выход которого соединен с блоком 17, так же как и выход блока 27. Выходы блоков 10 и 2 связаны соответственно с одними из входов блоков 32 и 33 умножения, выходы которых соединены со входами блока 28. Первый выход задатчика 34 связан с блоком 32, третий выход - со блоком 33, а второй выход - с блоками 29 и 30.
Система автоматического управления положением функционирует следующим образом.
Объектом управления является электромеханическая система, состоящая из звена антропоморфного манипулятора, вращающегося вокруг неподвижной оси, и привода, осуществляющего управление этой системой. Блок 17 исполнительных органов включает электродвигатель постоянного тока с независимым возбуждением и редуктор. Управление осуществляется изменением напряжения, подаваемого на обмотку якоря элект- родвигат еля. Движение рассматриваемой системы описывается дифференциальными уравнениями
( + ,()
L Фг -/ L+dny U, ,
ал
где: - ток в цепи якоря, U - управляющее напряжение; / -- момент инерции звена манипулятора относительно оси вращения; J- момент инерции якоря электродвигателя и вра дающихся частей редуктора; ц - мо- MPirr электромагнитных сил,, приложенных к якорю; п - передаточное число редуктора; /. и / -- индуктивность и омическое сопротивление обмотки якоря соответственно; d и с - постоянные, являющиеся техническими параметрами электродвигателя; ср - угол поворота звена манипулятора.
Для большинства электродвигателей, используемых в промышленных роботах, время установления тока в цепи якоря много меньше времени выхода на стационарный режим вращения якоря и много меньше времени транспортной операции, выполняемой манипулятором.В терминах параметров системы это означает, что при расчетах в уравнении (2) можно пренебречь индуктивностью обмотки якоря и положить /,0.
Применяя для данной системы известные методы теории оптимального управления, получим следующее решение (закон изменения напряжения на входе электродвигателя) для оптимального по быстродействию перевода объекта манипулирования из произвольного начального положения в заданное конечное положение ф1 с торможением двигателя в конце процесса при ограничении на максимально допустимое напряжение
5(U.
(3)
«weSigntp при 1)0
U iLLe-e При т|)
(. при где Циж- максимальное значение управляющего напряжения.
ю ,,-,
(),j | sigmp.(4)
««««.
15 Для реализации управления вида (3) формируется значение величины -ф на выходе блока 13 после преобразования сигналов с датчиков 1 и 2 на блоках 4, 5, 8, 9, 18, 19, 20, 21, 25 и 26 в соответствии с выражением (4). При положительном, отрицательном или нулевом значении величины г| соответственно задействуется один из трех выходных контактов релейного элемента 14 и в соответствии с выражением (3) релейный элемент 15 подает на блок 17 исполнительных
25 органов управляющие сигналы, сформированные блоками 5, 16, 22, 23, 24 и 26. Процесс позиционирования выходит на конечный участок, когда отрабатывается заданный уго.п поворота при гашении скорости поворота (|) с заданной промежуточной точностью е.
30 Данное условие соответствует выражению (ср -ф).(5)
Условие (5) реализуется на блоках 6, 7, (2)10 и 12. Компаратор 12 в требуемый момент
времени выдает сигнал переключения в блок 27. С семи выходов задатчика 26 сни35 маются значения постоянных величин соотK(l + n2J)LU««e
ветственно 1; -1; ф1; dn
cd n
40
. . Значение в рекомендуется выбирать
из условия
.
(6)
45
упргв50
55
Vf+ T
где максимальное значение ляющего напряжения;
Ј, т - коэффициенты в линейном законе управления
(),(7)
обеспечивающие асимптотическую устойчивость конечного состояния (7), т. е. выражение (6) позволяет учесть ограничение на управляющее напряжение, а закон управления (7) обеспечивает точную обработку заданного положения манипулятора на конечном участке позиционирования.
Сигнал управления (7) формируется с помощью блоков 28, 32, 33 и 34. Переключение с управления (3) на управление (7) осуществляется релейным элементом 27, а сигнал останова блока 17 исполнительных
вольного начального положения в заданное конечное положение ф1 с торможением двигателя в конце процесса при ограничении на максимально допустимое напряжение
(U.
(3)
«weSigntp при 1)0
U iLLe-e При т|)
(. при где Циж- максимальное значение управляющего напряжения.
K(l + n2J)LU««e
ветственно 1; -1; ф1; dn
cd n
. . Значение в рекомендуется выбирать
из условия
.
(6)
5
упргв0
5
Vf+ T
где максимальное значение ляющего напряжения;
Ј, т - коэффициенты в линейном законе управления
(),(7)
обеспечивающие асимптотическую устойчивость конечного состояния (7), т. е. выражение (6) позволяет учесть ограничение на управляющее напряжение, а закон управления (7) обеспечивает точную обработку заданного положения манипулятора на конечном участке позиционирования.
Сигнал управления (7) формируется с помощью блоков 28, 32, 33 и 34. Переключение с управления (3) на управление (7) осуществляется релейным элементом 27, а сигнал останова блока 17 исполнительных
органов формируется элементом 31 при совпадении сигналов с компараторов 29 и 30, которые фиксируют полную отработку (до нулевого значения) заданных угла и угловой скорости манипулятора. С выходов задат чика 34 снимаются значения постоянных величин |, г| и 0.
Таким образом, наряду с оптимальным быстродействием повышается точность позиционирования манипулятора.
Формула изобретения
Система управления положением объекта по авт. св. № 1409975, отличающаяся тем, что, с целью повышения точности, она содержит дополнительно пятый и шестой блоки умножения, второй и третий компараторы, четвертый релейный элемент, шестой сумматор, второй задатчик, а также элемент И, причем первый вход пятого блока умножения подключен к выходу второго сумматора,
второй вход - к первому выходу второго задатчика, а выход - к первому входу шестого сумматора, второй выход второго задатчика соединен с первыми входами второго и третьего компараторов, вторые входы которых подключены соответственно к выходу датчика угла объекта и к выходу датчика угловой скорости объекта, а выходы - к соответствующим входам элемента И, связанного выходом с первым входом блока исполнительных органов, третий выход второго задатчика подключен к первому входу шестого блока умножения, второй вход которого соединен с выходом датчика угловой скорости объекта, а выход - с вторым входом шестого сумматора, выход третьего релейного элемента подключен к первому информационному входу четвертого релейного элемента, второй информационный вход которого связан с выходом шестого сумматора, управляющий вход - с выходом первого компаратора, а выход - с вторым входом блока исполнительных органов.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления положением объекта | 1987 |
|
SU1409975A1 |
| Устройство для управления приводом манипулятора | 1990 |
|
SU1821356A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2008 |
|
RU2372186C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2454696C1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631784C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2008 |
|
RU2385481C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443543C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2706079C1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631783C1 |
| Устройство для управления приводом робота | 1989 |
|
SU1646852A1 |
Изобретение откосится к системам управления приводом промышленных роботов, может быть использовано при создании гибких автоматизированных производств с применением электромеханических манипуляторов и является усовершенствованием изобретения по авт. св. № 1409975. Цель изобретения - повышение точности системы. Поставленная цель достигается тем, что в систему дополнительно введены два блока умножения, два компаратора, релейный элемент, сумматор, задатчик, а также элемент И. 1 ил.
| Система управления положением объекта | 1987 |
|
SU1409975A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
