7 S
(Л
01
СП
Герметичности,Внутри корпуса 1 установлен стержневой толкатель 2 с пру- з|синой 3, Рабочий конец толкателя 2 предназначен для контакта с упругой |(болочкой изделия 4, Двуплечий рьгааг 9 установлен на корпусе 1 посредством ;1ружинного крестообразного шарнира 10. На большем плече рычага 9 установлен электрически изолированный от юрпуса 1 контакт 11, меньшее плечо эьгчага 9 выполнено в виде сектора 12 из магнитомягкого материала., В средней части толкателя 2 установлен пло ский постоянный магнит 13, контактирующий с цилиндрической поверхностью
сектора 12, Электрическая схема дат-, чика содержит таймер 15, источник питания 16, переключатель 17 источника питания 165 первьш и второй сигнальные элементы 18, 19, блок 20 обработки сигналов, включающий первое и вто рое реле 21, 22, первое и второе реле 23, 24 времени и дистанционньш переключатель 25, Настраивают датчик на заданную величину хода рычага 9 с контактом 11, соответствующую ходу стержневого толкателя 2, Настраивают таймер 15 на заданную величину отсчета времени и начинают испытание. 1 з„п, ф-лы, 2 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик для контроля герметичности изделий с упругой оболочкой | 1985 |
|
SU1257454A1 |
| Противоугонное устройство транспортного средства | 1987 |
|
SU1516399A2 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ СИГНАЛИЗАЦИИ | 2005 |
|
RU2297672C1 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2406157C2 |
| Устройство для дистанционного управления совокупностью рассредоточенных объектов | 1971 |
|
SU444234A1 |
| Устройство для дистанционного управления и контроля двухпозиционных объектов | 1984 |
|
SU1228134A1 |
| Устройство для тревожной сигнали-зАции | 1979 |
|
SU849258A2 |
| Устройство для управления исполнительным органом | 1982 |
|
SU1149217A1 |
| Устройство для тревожной сигнализации | 1975 |
|
SU669370A1 |
| Устройство автоматизации кинопоказа | 1986 |
|
SU1322217A1 |
Изобретение относится к устрой- ствам для контроля герметичности изделий с упругой оболочкой путем из- мерения их деформации в вакууме. Целью изобретения является повьшение точности и информативности контрол я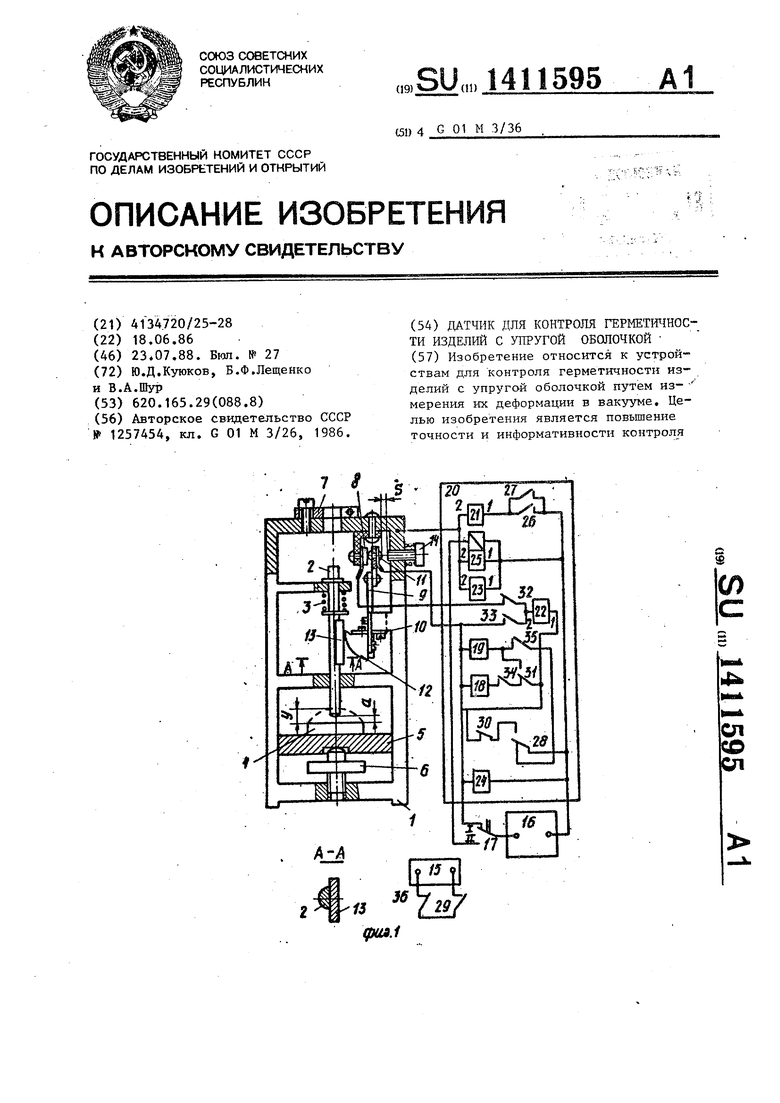
Изобретение относится к измерению неэлектр1-1ческих величин, в частности малых перемещений, электромеханическим способом и может быть использовано в устройствах для контроля герме-- тичности изделий с упругой оболочкой например изделий электронной промышленности; при их изготовлении.
Цель изобретения - повьшение- точности и информативности контроля герметичности путем снабжения датчика электрически изолированным от корпуса неподвижным контактом, вторым сигнальным элементом;, переключателем и блоком обработки сигналовj noToi что показания датчика не зависят от скорости вакуумирования изделия и контроль производится при постоянной, заранее известной и измеренной датчиком с большой точностью величиной изменения деформации оболочки изделия,
-.. ,. -. а также повышение наде 1;ности за счет снабжения датчика электрически соединенным с корпусом контактом,, выполненным в виде подпружиненного винта и плоским постоянным магнитом, и выполнения подвижного контактного элемента в виде двугшечего рычага.
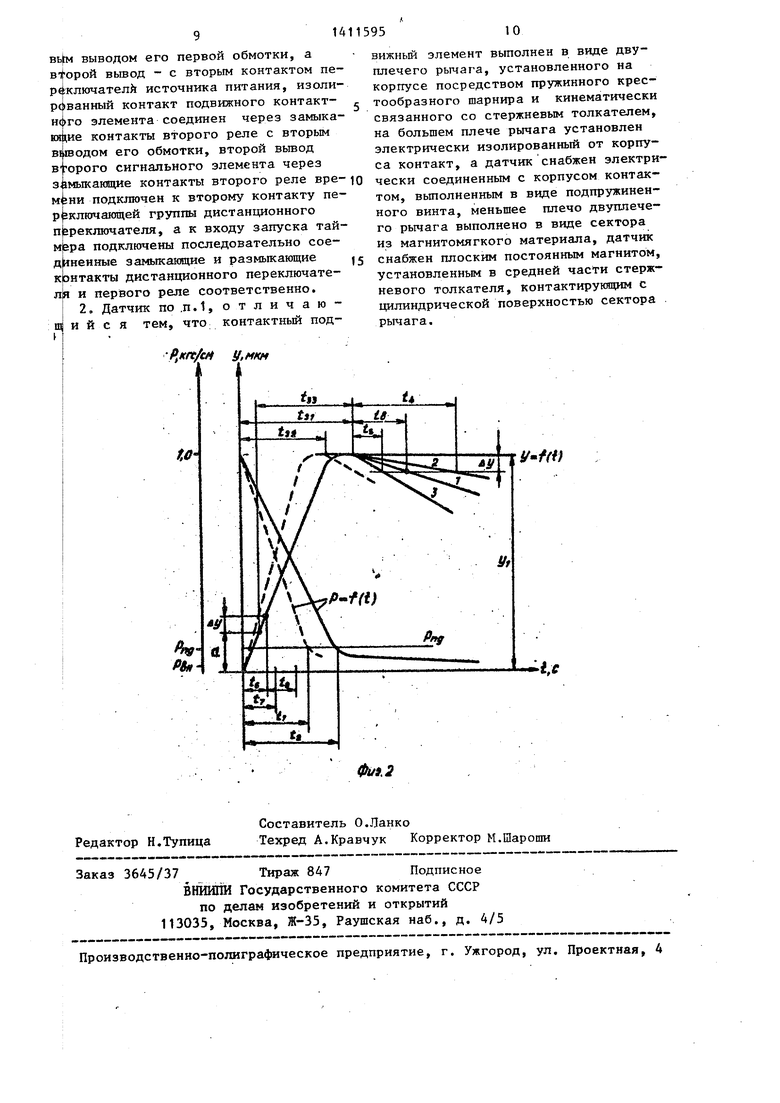
На фиг,1 показан датчик для контроля герметичности изделий с упругой оболочкой, сечение на фиг.2 - зависимости давления Р и деформации У от времени.
Датчик содержит корпус 1, внутри которого установлен стержневой толкатель 2, подпружиненный пружиной 3, Рабочий конец толкателя 2 предназна- чен для контакта с упругой оболочкой испытуемого изделия 4, Изделие 4 установл ено на столе 5, которьш может вместе с изделием 4 перемещаться относительно рабочего конца толкатели- 2 с помощью винта 6, ввинчиваемого в корпусе 1 и контактирующего со сто0 лом 5,
На корпусе 1 установлен зажим 7,. предназначенный для установки индикатора часового типа (не показан), с помощью которого производится на5 стройка датчика.
Датчик содержит также электрически изолированньй от корпуса 1 непод- .вижный контакт 8, подвижный контактный элемент, вьтолненный в виде дву0 плечего рычага 9, установленного на корпусе 1 посредством пружинного крестообразного шарнира 10 и кинематиче- ски связанного со стержневым толкателем 2.
На большем плече рычага 9 установлен электрически изолированньй от корпуса 1 контакт 11, меньшее плечо рычага 9 выполнено в виде сектора 12 из магнитомягкого материала, напри0 мер низкоуглеродистой стали, В средней части толкателя 2 установлен пло ский постоянный магнит 13, контактирующий с цилиндрической поверхностью сектора 12 рычага 9. Регулируемый контакт 14, электрически связанный
с корпусом 1, выполнен в виде подпружиненного винта.
Так как сектор 12 изготовлен из, магнитомягкого материала, он притягивается к постоянному магниту 13 толкателя 2. При движении толкателя .2 вверх магнит 13 поворачивает сектор 12 и рычаг 9 по часовой стрелке до соприкосновения контакта 11 с контактом 14, после чего движение рычага 9 прекращается.
Электрическая схема датчика содержит таймер 15 с реле отключения и входом запуска таймера 15, источник 16 питания, переключатель 17 источника 16 питания, первьй 18 и второй 19 сигнальные элементы, блок 20 обработки сигналов, включающий первое 21 и второе 22 реле, первое 23 и второе 24 реле времени и дистанционный переключатель 25, Первый выход источника 16 питания соединен с переключающим контактом переключателя 17 источника 16 питания, а второй - непосредственно с первыми выводами обмотки первого реле 23 времени и первой обмотки дистанционного переключателя 25, первым выводом обмотки второго реле 24 времени и через параллельно соединен- ные замыкающие контакты 26 и 27 первого рапе 23 времени и первого реле 21 - с первым выводом обмотки первого реле 21.
Вторые выводы обмотки первого ре- ле 23 времени, первой обмотки дистанционного переключателя 25 и обмотки первого реле 21 подключены к Kopirycy 1 датчика. Второй выход источника 16 питания через последовательно соеди- ненные подвижный контакт 28, первый контакт 29 переключающей группы дистанционного переключателя 25 и первый размыкающий контакт 30 первого реле
21соединен с подвижным контактом 31 переключающей группы второго реле 22
и -первым выводом обмотки второго реле 22.
Второй вывод обмотки второго реле
22через размыкающие контакты 32 реле отключения таймера 15 подключен к неподвижному контакту 8.
Первый, контакт 33 переключанлцей группы второго реле 22 соединен непосредственно с первым выводом второго сигнального элемента 19, а второй контакт 31 переключающей группы второго реле 22 подключен через замыкающие контакты 34 реле отключения таймера 15 к первому выводу первого сигнального элемента 18.
Первый вывод второго сигнального элемента 19 и второй вьшод первого сигнального элемента 18, а также изо- лированньш контакт 11 подвижного контактного элемента 9 и второй вьтод второго реле 24 времени подключены к первому контакту переключателя 17 источника 16 питания.
Изолированный контакт 11 соединен через замыкающие контакты 33 второго реле 22 с вторым вьгоодом его обмотт ки. Второй вывод второго сигнального элемента 19 через замыкающие контакты 35 второго реле 24 времени подключен к второму контакту 28 переключающей группы дистанционного переключателя 25, а к входу запуска таймера 15 подключены последовательно соединенные замыкающие 29 и размыкающие 36 контакты дистанционного переключатет ля 25 и первого реле 21 соответственно.
Характеристики Р f(t) и Y f(t) зaвиcIiмocтeй изменения во времени давления Р в вакуумной камере с датчиком и изделием 4 и деформации Y упругой оболочки изделия 4.приведены на фиг,2.
При вакуумировании камеры в зависимости от скорости вакуумирования давление Р в камере уменьшается за время t или tj с 1 кгс/см до , ( - давление постоянной деформации, дальнейшее понижение которого не вызывает увеличения достигнутой деформации у упругой оболочки изделия, имеющего высокую герметичность Q), а конечное давление в камере устанавливается приблизительно равным Р (РВИ предельное давление, которое дает насос).
Герметичность изделия 4 с упругой оболочкой можно точно измерить путе определения скорости изменения амплитудного значения деформации оболочки при воздействии на изделие 4 вакуума величина которого меньше давления Скорость Vjj изменения деформации упругой оболочки изделия 4 равна л Ч
где ftY - изменение амплитудного значения Y деформации упругой оболочки, мин,
tg - времяs
в течение которого
Реле 24 времени включается и от
амплитудное значение измени- считывает время t (фиг.2), причем
лось, на величину jY, с. При этом катоде скорость откачки 1} зделия не влияет на результаты измерения герметичности.
Если скорость Vjj изменения деформации Y изделия f с упругой оболочt t ( (, время, но истечении ко 5 торого замыкается контакт 11 и регу лируемый контакт 14J t - время, от считываемое реле 24 времени от нача ла испытаний на герметичность, когд одновременно начинается вакуумирова
1|:оЙ5 имеющего герметичность Q, равна 10 ние камеры с изделием 4 и переключатель 17 источника 16 питания переводят в положение I). .
Если изделие 4 имеет большую течь, его оболочка не увеличивается в раз- 5 мерах и стержневой толкатель 2 через плечо рычага 9 не воздействует на контакты 8, 11 и 14 датчика. Элементы блока 20 обработки сигналов не.изменяют своего первоначального состоя- 20 нияо После отсчета времени t реле
24 времени замыкает свои контакты 35
|Тики Y (} изделие 4 имеет герме- и включает второй сигнальньгй элемент тичность Qg хуже, чем Qo
Определение герметичности изделия
4 производится путем сравнения факти- 25 чивает свои размеры и размыкает кон- ческой скорости Vji или Vjj изменения такты 11 и 8, но не замыкает контак- 4мплитудного значения деформации с ты 11 и 14 После отсчета времени t
талонной скоростью , изделия 4, ., реле 24 времени замыкает свои контак- меющего герметичность Q Сравнение ты 35 к включает сигнальный элемент скоростей V-g и V-p со скоростью Vg Брак, гроизводит блок 20 обработки сигналов рдтчнка.
4Y ,
1 участок 1 характеристики Y
f(t),, то при скорости Vj, изменения
uY Реформации Y, равной -- (участок 2
-Ф
характеристики Y fCt), изделие.4 имеет герметичность лучшую, чем Qo
фри скорости V изменения дефор -1ации 0-3.
fj 5 равной -- (участок 3 характерис 9 Брак, Если изделие 4 имеет большую течь, его оболочка немного з велиЕсли изделие 4 не имеет большой течк. его оболочка под воздействием избыточного давления находящегося внутри нее газа увеличивает свои разДатчик работает следующим образом Предположт, измеряется герметичность изделия 4 с упругой оболочкой меры и, пройдя расстояние G касаетр известно, что при изменении амп.пи тудного значения, Y деформация этого
Изделия 4 на величину д Y 2 мкм в 11ечение t 60 с, изделие 4 имеет 1|ерметичность Q
: Настраивают датчик таким образом, 4тобы ход S подвижного контактного Элемента с контактом 11 соответство; ходу uY стержневого толкателя 2, 1 авного 2 мкм. Ход aY толкателя 2 ilpH настройке контролируют по пока- ;|аниям индикатора часового типа (не «оказан)j измерительный стержень ко
foporo опирается о торец стержневого толкателя 2.
Настраивают таймер 15 на отсчет
«ремени to, 60 с. Устанавливают на р
ся рабочего конца стержневого толкателя 2 Ид преодолевая усилие пружины 3s подымает его вверх. Сектор 12 поворачивает по часовой стрелке ры- 4Q чаг 9, размыкая контакт 11 и контакт 8,
После того, как толкатель 2 поднимается на величину Y, замыкаются контакты 11 и 14« Дистанционный,переключатель 25 включается и его контакты 29 замыкаются, а контакты 28 переключаются, поэтому после отсчета времени t замыкание контактов 35 реле 24 времени не вызывает включения сигнального элемента 19 Брак.
Одновременно с замыканием контакта 1 1 с контактом 14 реле 23 времени
45
50
Стол- 5 с зазором я между рабочим кон-на время tg (tg - время, отсчитывае1|;ом толкателя 2 и оболочкой изделие реле 23 времени с момента замыОпускают на датчик с изделием 4 кол-кания контакта 11 с контактом 14 датijtaK вакуумной камеры Сне показаны). - чика) 3afMKaeT свои контакты 26,
(Одновременно начинают вакуумироватьВключается реле 21 и самоблокируется
Камеру и переводят переключатель 17контактами 27. Реле 21 размыкает свои
источника 16 питания-в положение I,контакты 36 и 30. Реле 23 времени.
Реле 24 времени включается и от
t t ( (, время, но истечении ко- торого замыкается контакт 11 и регулируемый контакт 14J t - время, отсчитываемое реле 24 времени от начала испытаний на герметичность, когда одновременно начинается вакуумироваи включает второй сигнальньгй элемент
чивает свои размеры и размыкает кон- такты 11 и 8, но не замыкает контак- ты 11 и 14 После отсчета времени t
Брак, Если изделие 4 имеет большую течь, его оболочка немного з велиреле 24 времени замыкает свои контак- ты 35 к включает сигнальный элемент ° Брак,
Если изделие 4 не имеет большой течк. его оболочка под воздействием избыточного давления находящегося внутри нее газа увеличивает свои разся рабочего конца стержневого толкателя 2 Ид преодолевая усилие пружины 3s подымает его вверх. Сектор 12 поворачивает по часовой стрелке ры- чаг 9, размыкая контакт 11 и контакт 8,
После того, как толкатель 2 поднимается на величину Y, замыкаются контакты 11 и 14« Дистанционный,переключатель 25 включается и его контакты 29 замыкаются, а контакты 28 переключаются, поэтому после отсчета времени t замыкание контактов 35 реле 24 времени не вызывает включения сигнального элемента 19 Брак.
Одновременно с замыканием контакта 1 1 с контактом 14 реле 23 времени
отсчитав время tg, размыкает свои контакты 26. После замыкания контакта 1 1 и контакта 14 рычаг 9 и сектор
12становятся неподвижными, но оболочка изделия 4 продолжает увеличиваться до наибольшего (амплитудного) размера Y. Толкатель 2 вместе с магнитом 13 продолжает движение вверх, и это движение прекращается, когда размер Y будет наибольшим.
С течением времени негерметичная оболочка изделия 4 уменьшает свои размеры и вслед за оболочкой изделия 4 стержневой толкатель 2 с магнитом
13опускается вниз. Сектор 12 поворачивает против часовой стрелки рычаг 9, размыкая контакты 11 и 14. Реле 21 обесточивается при первом размыкании этих контактов. Контакты 27 реле 21 размыкаются и схема защищена от дальнейших ложных sanycKOB, вызванных дребезгом контактов 11 и 14. Контракты 36 и 30 реле 21 замыкаются. Таймер 15 начинает отсчет времени t
чем замыкаются кон- таймер 15 отсчитывает
tL
&о
Если раньше, такты 11
и
25 кающие контакты первого реле времени и первого реле - с первым выводом об мотки первого реле, вторые выводы об мотки первого реле времени, первой обмотки дистанционного переключателя
время t , его контакты 34 замыкаются,
а контакты 32 размьшаются, что свиде- зо обмотки первого реле подключены к
тельствует о том, что герметичность изделия 4 лучше, чем Q (участок 2 характеристики Y f(t) на фиг.2). Включается сигнальньш элемент 18 Норма /
Если раньше, чем таймер 15 отсчитывает время tg, замыкаются контакт 11с контрактом 8 - включается реле 22 и самоблокируется контактами 33. Контакты 31 реле 22 переключаются. Это состояние элементов схемы свидетельствует о том, что герметичность изделия 4 хуже, чем Q, Включается сигнальный элемент 19 Брак.
После окончания цикла измерения переключатель 17 источника 16 питани переводят в положение II. При этом вторая обмотка дистанционного переключателя 25 включается и он возвращается в исходное состояние.
Формула изобретения
изделия, подвижный контактный элемент с электрически изолированным от корпуса контактом, таймер с реле отклю- чения и входом запуска таймера, источник питания и сигнальный элемент, отличающийся тем, что, с целью повышения точности и информативности, он снабжен электрически
изолированньм от корпуса неподвижным контактом, вторым сигнальным элементом, блоком обработки сигналов, вклнз- чаюш;им первое и второе реле и первое и второе реле времени, переключате-
лем источника питания и дистанционным переключателем, первый выход источника питания соединен с переключающим контактом переключателя источника питания, а второй - непосредственно
с первыми выводами обмотки первого реле времени и первой обмотки дистанционного переключателя и первым вьгоо- дом обмотки второго реле времени и через параллельно соединенные замыкающие контакты первого реле времени и первого реле - с первым выводом обмотки первого реле, вторые выводы обмотки первого реле времени, первой обмотки дистанционного переключателя
5
0
5
0
5
корпусу датчика, второй выход источника питания через последовательно соединенные подв11жный контакт и первый контакт переключающей группы дистанционного переключателя и первый размыкающий контакт первого реле соединен с подвижным контактом переключающей группы второго реле и первым выводом обмотки второго реле, второй вьшод обмотки второго реле через размыкаюпдае контакты реле отключения таймера подключен к неподвижному контакту, первый контакт переключающей группы второго реле соединен непосредственно с первым выводом второго сигнального элемента, а второй контакт переключающей группы второго реле подключен через замыкаюш е контакты реле отключения таймера к первому выводу первого сигнального элемента, первьш вывод второго сигнального элемента и второй вывод первого сигнального элемента, а также изолированный контакт подвижного контактного элемента и второй вывод второго реле времени подключены к первому контакту переключателя источника питания, первый вывод второй обмотки дистанционного переключателя соединен с перto
PtH
/ f(i)
i.e
| Датчик для контроля герметичности изделий с упругой оболочкой | 1985 |
|
SU1257454A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
