Изобретение относится к электроизмерительной технике и может быть использовано в цифровых автоматических мостах для измерения параметров ем- костных, индуктивных, резистивных и других датчиков в системах контроля и регулирования технологических процессов и автоматизащш научных исследований.
Цель изобретения - повышение быстродействия процесса уравновешивания.
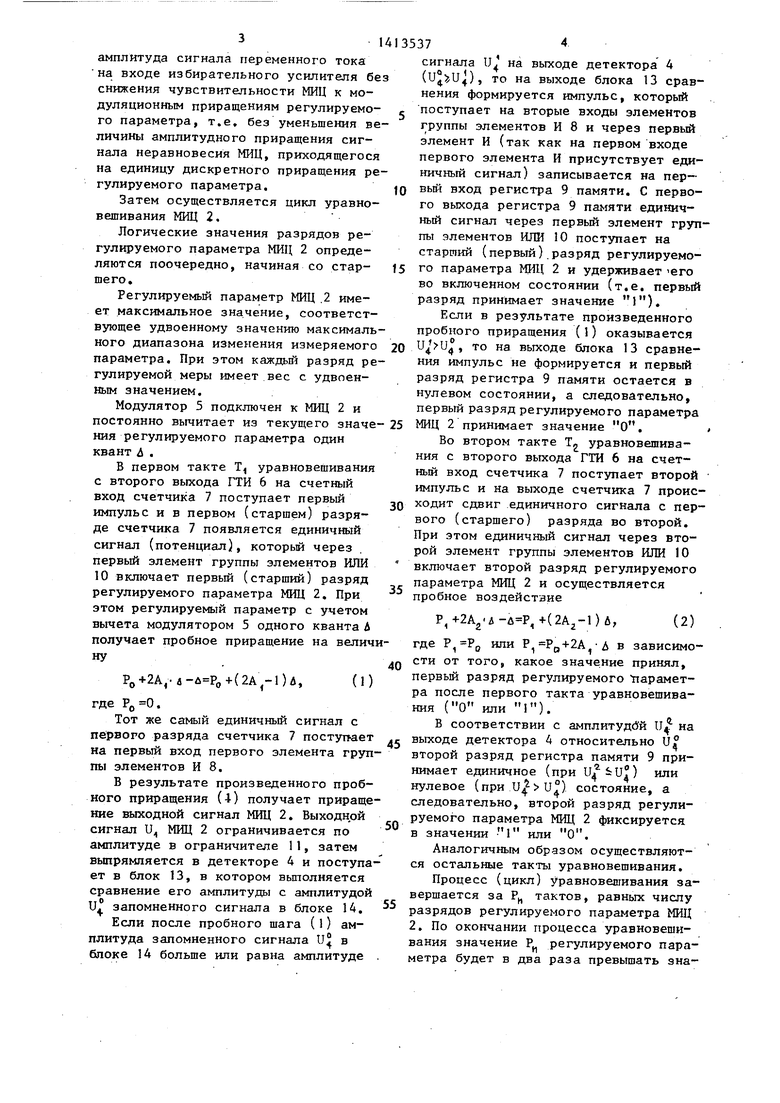
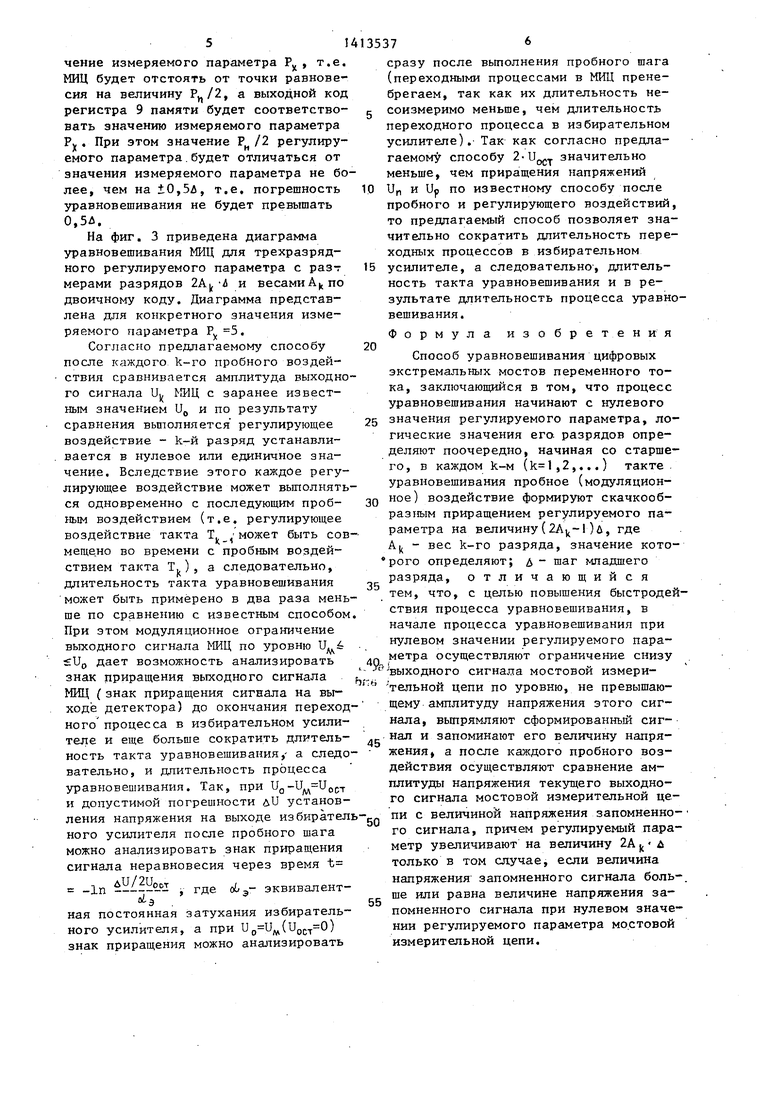
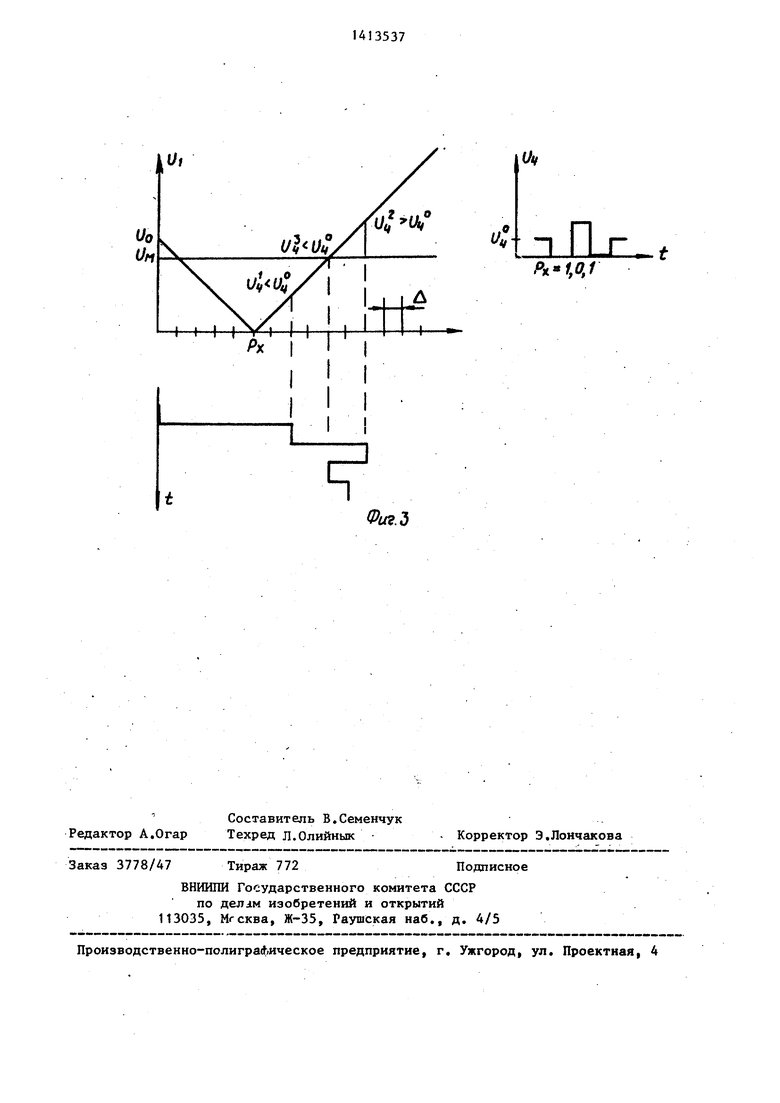
На фиг. I представлена структурная схема цифрового экстремального моста переменного тока; на фиг. 2 - алгот ритм уравновешивания мостовой измерительной цепи; на фиг. 3 - диаграмма, .поясняющая порядок уравновешивания мостовой измерительной цепи для трехразрядной регулируемой меры с весами по двоичному коду.
На схеме цифрового экстремального моста для осуществления предлагаемого способа уравновешивания, обозначены генератор 1 питания, мостовую измерительную цепь (МИЦ) 2, избирательный усилитель 3, детектор 4 приращений, модулятор 5., генератор 6 тактовых импульсов (ГТИ), счетчик 7, группу элементов И 8,регистр 9 памяти, группу элементов ИЛИ 10, ограничитель П модуляции, блок 12 формирования сигнала углубления, блок 13 сравнения и блок 14 запоминания.
На фиг. 2 и 3 приняты следующие обозначения: Р, ,Р ,... ,Ру, - значения регулируемого параметра после 1-го, 2-го,...,п-го тактов уравновешивания; А,А2,...,А - веса 1-го, 2-го,..., п-го разрядов регулируемого царамет- ра (1-й разряд является старшим); А - шаг младшего разряда регулируемого параметра; U - амплитудное значение выходного сигнала МИЦ, соответствующее нулевому значению регулируе- мого параметра , U - уровень модуляционного углубления выходного сигнала мостовой измерительной цепи; и - амплитуда сигнала на выходе детектора приращений при .нулевом значе- НИИ регулируемого параметра; К - результирующий коэффициент передачи канала сигнала неравновесия (результирующий коэффициент передачи избирательного усилителя и детектора при- ращений) моста; U,U,... ,U - амплитуды сигналов на выходе детектора приращений после 1-го, 2-го,...,п-го пробных воздействий; Т, ,1,,.., ,Т -
1-й, 2-й,...,п-й такты уравновешивания; и и и - текущие амплитуды сигналов на выходах МИЦ и детектора приращений; Р,, - измеряемый параметр, t - время.
Перед началом процесса уравновешивания YIpoизвoдиtcя установка моста в исходное состояние. Для этого на первом выходе ГТИ 6 формируется импульс который поступает на входы сброса счетчика 7 и регистра 9, в результат чего выходные коды счетчика 7 и регистра 9 устанавливаются в нулевое значение, а следовательно, нулевое значение принимает регулируемый параметр (Р(,0) МИЦ 2. При этом выходной сигнал МИЦ 2 принимает значение U,, С первого выхода ГТИ 6 этот импульс также поступает на вход блока 12 формирования сигнала углубления. В блоке 12 в соответствии с уровнем U на его входе формируется сигнал, который подается на вход регулирования ограничителя 1I и устанавливает уровень и ограничения модуляции выходного сигнала Up 1МЩ 2. При этом уровень и ограничещш модуляции сигна- ла Uj устанавливается таким образом, что пьшолняется условие , . Уровень и ограничения сохраняется на протяжении последующего цикла уравновешивания МИЦ 2. С выхода ограничителя 11 сигнал и,, , ограниченный снизу по уровню U,( и Ug-U), подаг ется на вход детектора А приращений, где он выпрямляется, и поступает на входы блока 13 сравнения и блока 14 запоминания. После этого на третьем выходе ГТИ 6 формируется импульс, который поступает в блок 14 запомина- ния, и в этом блоке запоминается амплитуда и выходного сигнала детектора 4. Ограничитель 11 модуляции имеет функцию преобразования U f(), благодаря которой достигается ограничение сигнала переменного тока снизу. Такую функцию преобразования имеют, например, стабипитроны с двухсторонней стабилизацией,через которые пропускают сигнал переменного тока. Регулировкой числа стабилитронов, включаемых между МИЦ и избирательным усилителем, можно регулировать величину и, а следовательно, регулировать величину модуляционного ограничения выходного сигнала МИЦ. За счет модуляционного ограничения сигнала переменного тока уменьшается
амплитуда сигнала переменного тока на входе избирательного усилителя бе снижения чувствительности МИЦ к модуляционным приращениям регулируемо- го параметра, т.е. без уменьшения величины амплитудного приращения сигнала неравновесия МИЦ, приходящегося на единицу дискретного приращения регулируемого параметра,
Затем осуществляется цикл уравновешивания МИЦ 2.
Логические значения разрядов регулируемого параметра МИЦ 2 определяются поочередно, начиная со стар- шего.
Регулируемый параметр МИЦ ,2 имеет максимальное зна.чение, соответствующее удвоенному значению максимального диапазона изменения измеряемого параметра. При этом каждьй разряд регулируемой меры имеет вес с удвоенным значением.
Модулятор 5 подключен к МИЦ 2 и постоянно вычитает из текущего значе ния регулируемого параметра один квант 4 .
В первом такте Т, уравновешивания с второго выхода ГТИ 6 на счетный вход счетчика 7 поступает первый импульс и в первом (старшем) разряде счетчика 7 появляется единичный сигнал (потенциал), которьй через первый злемент группы элементов ИЛИ 10 включает первый (старший) разряд регулируемого параметра МИЦ 2. При этом регулируемый параметр с учетом вычета модулятором 5 одного кванта А получает пробное приращение на величну
Ро+2А,(2А,-1)л,
где .
Тот же самый единичный сигнал с первого разряда счетчика 7 постутиет на первый вход первого элемента группы элементов И 8.
В результате произведенного пробного приращения (4) получает приращение выходной сигнал МИЦ 2. Выходнрй сигнал и МРЩ 2 ограничивается по амплитуде в ограничителе 11, затем вьшрямляется в детекторе 4 и поступает в блок 13, в котором вьшолняется сравнение его амплитуды с амплитудой Uf запомненного сигнала в блоке 14.
Если после пробного шага (1) амплитуда запомненного сигнала U в блоке 14 больше или равна амплитуде
, jO
}5
2025
I3537
сигнала
30
35
и. на выходе детектора 4
(), то на выходе блока 13 сравнения формируется импульс, который поступает на вторые входы элементов группы элементов И 8 и через первый элемент И (так как на первом входе первого элемента И присутствует единичный сигнал) записывается на первый вход регистра 9 памяти. С первого выхода регистра 9 памяти единичный сигнал через первый элемент группы элементов ИЛИ 10 поступает на старший (первый).разряд регулируемого параметра МИЦ 2 и удерживает его во включенном состоянии (т.е. первьй разряд принимает значение 1).
Если в результате произведенного пробного приращения (1) оказывается , то на выходе блока 13 сравнения импульс не формируется и первый разряд регистра 9 памяти остается в нулевом состоянии, а следовательно, первый разряд регулируемого параметра МИЦ 2 принимает значение О.
Во втором такте Т. уравновешивания с второго выхода ГТИ 6 на счетный вход счетчика 7 поступает второй импульс и на выходе счетчика 7 происходит сдвиг единичного сигнала с первого (старшего) разряда во второй. При этом единичный сигнал через второй элемент группы элементов ИЛИ 10 включает второй разряд регулируемого параметра МИЦ 2 и осуществляется пробное воздействие
(2)
Р,+2А ,+(2А2-1)Л,
40
где Р,РО или Р Рц+2А -Д в зависимости от того, какое значе ние принял, первьй разряд регулируемого парамет- ра после первого такта уравновешивания (О или I).
,
0
5
В
на
соответствии с амплитудой U. выходе детектора 4 относительно U второй разряд регистра памяти 9 принимает единичное (при ) или нулевое (при ) состояние, а следовательно, второй разряд регулируемого параметра МИЦ 2 фиксируется в значении 1 или О.
Аналогичным образом осуществляются остальные такты уравновешивания.
Процесс (цикл) Уравновешивания завершается за PJ, тактов, равных числу разрядов регулируемого параметра МИЦ 2, По окончании процесса уравновешивания значение Р регулируемого параметра будет в два раза превышать значение измеряемого параметра Р, т.е. МИД будет отстоять от точки равновесия на величину , а выходной код регистра 9 памяти будет соответствовать значению измеряемого параметра
X
При
этом значение Р. /2
И
регулируемого параметра.будет отличаться от значения измеряемого параметра не более, чем на ±0,5Д, т.е. погрешность уравновешивания не будет превышать 0,5Д.
На фиг. 3 приведена диаграмма уравновешивания МИЦ для трехразрядного регулируемого параметра с разт мерами разрядов 2А|,-Л и весами А по двоичному коду. Диаграмма представлена для конкретного значения измеряемого параметра .
Согласно предлагаемому способу после каждого k-ro пробного воздействия сравнивается амплитуда выходнос заранее известго сигнала Uj, МИЦ ным значением U и по результату сравнения вьтолняется регулирующее воздействие - k-й разряд устанавливается в нулевое или единичное значение. Вследствие этого каждое регулирующее воздействие может выполняться одновременно с последующим пробным воздействием (т.е. регулирующее воздействие такта Т может быть сов- меще,но во времени с пробным воздействием такта Т.), а следовательно, длительность такта уравновешивания
может быть примерено в два раза меньше по сравнению с известным способом. При этом модуляционное ограничение выходного сигнала МИЦ по уровню Пд .
sUn дает возможность анализировать
.
знак приращения выходного сигнала МИЦ (знак приращения сигнала на выходе детектора) до окончания переходного процесса в избирательном усилителе и еще больше сократить длительность такта уравновешивания, а следовательно, и длительность процесса уравновешивания. Так, при )(.-r и допустимой погрешности ди установления напряжения на выходе избирател ного усилителя после пробного шага можно анализировать знак приращения сигнала неравновесия через время t
1п .
.
ная постоянная затухания избирательного усилителя, а при () знак приращения можно анализировать
где
эквивапент
14135376
сразу после вьтолнения пробного шага (переходными процессами в МИЦ пренебрегаем, так как их длительность несоизмеримо меньше, чем длительность переходного процесса в избирательном усилителе).- Так как согласно предлагаемом способу 2-U значительно
ост
10
меньше, чем приращения напряжений JP
и и Up по известному способу после
15
20
25
45
gQ
пробного и регулирующего воздействий, то предлагаемый способ позволяет значительно сократить длительность переходных процессов в избирательном усилителе, а следовательно , длительность такта уравновешивания и в результате длительность процесса уравновешивания.
Формула изобретения
Способ уравновешивания цифровых экстремальных мостов переменного тока, заключаюшзийся в том, что процесс уравновешивания начинают с нулевого значения регулируемого параметра, логические значения его. разрядов определяют поочередно, начиная со старшего, в каждом k-M (,2,...) такте, уравновешивания пробное (модуляцион- 30 ное) воздействие формируют скачкообразным приращением регулируемого параметра на величину (2А )л, где А| - вес k-ro разряда, значение кото- рого определяют; д - шаг шaдшeгo разряда, отличающийся тем, что, с целью повышения быстродействия процесса уравновешивания, в начале процесса уравновешивания при нулевом значении регулируемого параметра осуществляют ограничение снизу 1ходного сигнала мостовой измери- тельной цепи по уровню, не превышающему амплитуду напряжения этого сигнала, вьтрямляют сформированный сигнал и запоминают его величину напряжения, а после каждого пробного воздействия осуществляют сравнение амплитуды напряжения текущего выходного сигнала мостовой измерительной цепи с величиной напряжения запомненно- го сигнала, причем регулируемый пара35
l ti
55
метр увеличивают на величину 2А ,j д только в том случае, если величина напряжения запомненного сигнала боль-, ше или равна величине напряжения запомненного сигнала при нулевом значении регулируемого параметра мостовой измерительной цепи.
О 1
(Uo-Unj-H U v Po 0 -Po(2Ai 1)A
/
Po
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока и устройство для его осуществления | 1983 |
|
SU1150553A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Способ выбора поддиапазона измерений в универсальных экстремальных мостах переменного тока | 1987 |
|
SU1429044A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока и устройство для его осуществления | 1985 |
|
SU1312490A1 |
| Автоматический мост переменного тока | 1979 |
|
SU834536A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Цифровой экстремальный мост переменногоТОКА C пОдЕКАдНО-СлЕдящиМ уРАВНОВЕшиВА-НиЕМ | 1979 |
|
SU836596A1 |
| Автоматический мост переменного тока | 1978 |
|
SU805184A1 |
| Цифровой феррозондовый магнитометр | 1986 |
|
SU1437811A1 |
Изобретение относится к электроизмерительной технике. Способ уравновешивания цифровых экстремальных мостов переменного тока реализован в устройстве, содержащем генератор 1 питания, мостовую измерительную цепь 2, избирательный усилитель 3, детек- тСр 4 приращений, модулятор 5, генератор 6 тактовых импульсов, счетчик 7, группу элементов И 8, регистр 9 памяти, группу элементов ИЛИ 10, ограничитель 11 модуляции, блок 12 формирования сигнала углубления, блоки 13 и 14 сравнения и запоминания соответственно. В начале процесса уравновешивания при нулевом значении регулируемого параметра ограничивают снизу выходной сигнал мостовой измерительной цепи по уровню, не превышающему амплитуду напряжения этого сигнала, вьтрямляют сформированный сигнал и запоминают его величину напряжения. Сравнивают амплитуду напряжения текущего выходного сигнала мостовой измерительной цепи с величиной напряжения, полученной выше, и если эти величины равны или полученная ранее больше, увеличивают регулируемый параметр на величину 2Ак -А где А - вес k-ro разряда; л - шаг младшего разряда. Повьппается быстродействие .процесса уравновешивания. 3 ил. с S (Л 00 СП со м
U af / P2 Pt
i (2A2-1) Л
U
/
,..Рп-1(2Ап-1)Л
Рп -Рп-1- 2Апд.
4z
Фиг. 2
f
Vi
Uo UM
I I I
О
f tJ
(
u,
л
Фи.З
| Новик-А.И | |||
| Системы автоматического уравновешивания цифровых экстремальных мостов переменного тока | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока и устройство для его осуществления | 1983 |
|
SU1150553A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
