(54) СПОСОБ АВТОМАТИЧЕСКОГО УРАВНОВЕиШВАНИЯ ЦИФРОВЫХ ЭКСТРЕМАЛЬНЫХ МОСТОВ ПЕРЕМЕННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подекадно-следящего уравно-вешивания цифровых автоматических мостовпеременного тока | 1974 |
|
SU508745A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1987 |
|
SU1413537A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |
| Способ уравновешивания безмодуляционного экстремального моста переменного тока | 1980 |
|
SU966603A1 |
| Автоматический мост переменного тока | 1979 |
|
SU834536A1 |
| Цифровой автоматический экстремальныйМОСТ пЕРЕМЕННОгО TOKA | 1979 |
|
SU828096A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока и устройство для его осуществления | 1985 |
|
SU1312490A1 |
| Способ автоматического уравновешивания моста переменного тока для измерения одной составляющей комплексной проводимости | 1980 |
|
SU868601A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока | 1981 |
|
SU970238A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока | 1978 |
|
SU748256A1 |
I
Изобретение относится к электроизмерительной технике и может быть использовано при построении систем автоматического уравновешивания быстродействующих цифровых экстремальных мостов переменного тока.
Известен способ уравновешивания цифровых экстремальных мостов переменного тока, заключающийся в том, что величина регулирующего воздействия равна сразу нескольким шагам уравновепшвания, причем большему нарушению равновесия соответствует большее регулирующее воздействие.
Известный способ уравновешивания основан на моделировании амплитуды сигнала неравновесия моста переменного тока некоторой упрощенной аппроксимирующей зависимостью к последующем предсказании (экстраполяции) величины неравновесия по уравновешиваемому параметру. Для выработки регулирующих воздействий при этом используют не только знак, но и величину модуляционного приращения сигнала неравновесия, а также амплитуду самого сигнала неравновесия. Благодаря увеличению регулирующих воздействий при их формировании экстраполяционным способом сокращается число тактов уравновешивания, следовательно, повышается быстродействие мостов.
Точность формирования регулиtoрующих воздействий при экстраполяционном способе уравновешивания зависит от степени приближения аппроксимирующей зависимости к реальной функции. В известном способе уравновешивания
15 это приближение таково, что методическая погрешность оценки степени неравновесия может достигать 2-3 шагов уравновешивания при исходном неравновесии в 10 шагов (одна декада).
20 Поэтому для доуравновешивания моста на данной декаде вьщеляют дополнительный такт уравновешивания. Таким образом, ограниченная точность
формирования регулирующих воздействий согласчс изгггстному экстраполяционному спосс;;.-/ уравновешивания принципиально ограничивает быстродействие мостов переменного тока.
Наиболее близким по технической сущности к предлагаемому является экстраполяционный способ автоматического уравновешивания цифровых квазиэкстрема,пьных мостов переменного тока, при котором модулируют регулируемый параметр, детектируют сигнал неравновесия моста до и после модуляции, по знаку модуляционного приращения определяют направление регулирования р.
Цель изобретения - повьшение быстродействия автоматического уравновешивания цифрового экстремального моста переменного тока с ортогональными линиями уравновешивания за счет диквидации методической погрешности формирования регулирующих воздействий.
Поставленная цель достигается тем что в способе автоматического уравновешивания цифровых экстремальных мостов переменного тока с ортогональными линиями уравновешивания, при котором модулируют регулируемый параметр, детектируют сигнал неравновесия моста до и после модуляции, по знаку модуляционного приращения определяют направление регулирования, полученный после детектирования сигнал возводят в квадрат, измеряют модуляционное приращение квадрата продетектированного сигнала и изменяют регулируемый параметр на величину, пропорциональную этому приращению,
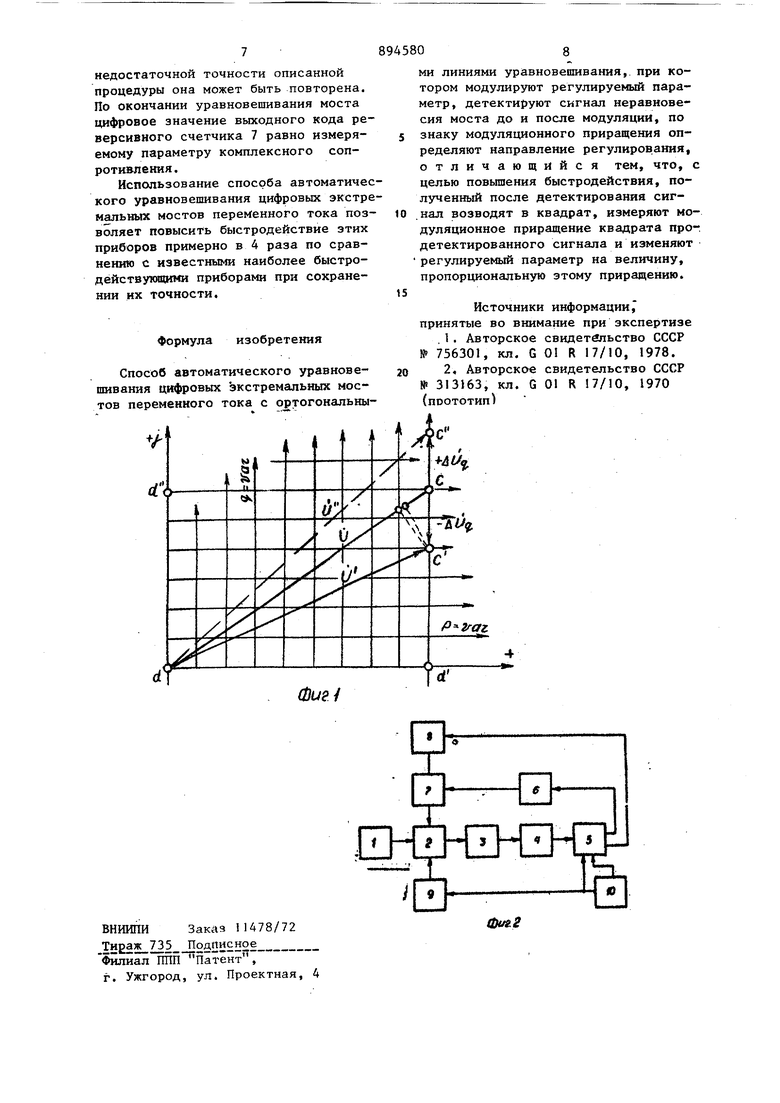
На фиг. 1 изображена векторная диаграмма напряжений измерительной цепи цифрового модуляционного экстремального моста с ортогональными линиями уравновешивания; на фиг. 2 блок-схема цифрового экстремального моста переменного тока.
Способ ос тцествляется следующим образом.
Поскольку линии уравновешивания моста ортогональны, то из прямоугольного треугольника dcd (фиг. 1) следует
(1)
т.е.
I 01 I Up i 1 0, 1% (9рДР)() Ш
После модуляции, например, параметра q модуль напряжения неравновесия удовлетворяет равенству
5 |Ur--(5puP)((o)l (3)
Up и и
- напряжения неравновегдесия, возникающие при нарушении равновесия только по параметру р либо только по параметру q соответственно ;
SP и 5„ - чувствительности мостовой цепи; др идя - величины нарушения
равновесия по параметрам р и q;
Л|и|р - приращение модуля сигнала неравновесия моста, обусловленное модуляцией Л Up по периметру РИз уравнений (2) и (3) непосредственно следует, что искомая величина нарушения равновесия по параметру q определяется равенством
. CUa) 1
(4)
гдеД( V() /U/-/U/ модуляционное приращение квадрата амплитуды сигнала равновесия.
Разделив обе части равенства (4) на величину единичного шага уравновешивания М,.., выразим неравновесие количеством дискретных шагов Nn
N -
л{и)ч)(5) 2КА%Д,
ш
Аналогичное выражение может быть получено для определения степени неравновесия по второму ортогональному 45 параметру Np:
jl 2
И
д(и) (6) ЛР.
UI
где Л(и) {Jp)( модуляционное приращение квадрата амплитуды сигнала неравновесия при модуляции моста по параметру р.
Из формул (5) и (б) следует, что неравновесие моста с ортогональными ли ;иями уравновешивания по каждому из регулируемых параметров протторционально приращению квадрата амплитуды сигнала неравновесия , которое обусловлено модуляцией этого параметра. Следует особо подчеркнуть, что формулы (5) и (б), по которым производится расчет неравновесия моста являются абсолютно точными. Таким образом, в предлагаемом способе ура новешивания в отличие от известного методическая погрешность в определении величины неравновесия принцип ально отсутствует. Это дает возможность использовать способ уравновешивания при построении быстродейс вующих мостов переменного тока с ор тогональными линиями уравновешивани При использовании предлагаемого способа точность определения величи ны нарушения равновесия ограничена лишь инструментальными погрешностями элементов моста, а эти погрешнос ти могут быть сведены к минимуму. Расчеты показывают, что при заданной: погрешности Т измерения и инструментальной погрешности о определения величины нарушения равновесия число п тактов уравновешива ния по .предлагаемому способу определяется равенством , te ((f} Например, если погрешность О опр деления состояния равновесия, харак теризующая качество экстраполяциониого устройства моста, составляет 1 % (1 (Гт , а погрешность измерения -у не должна превышать 0,01% (1(Г) то такая точность измерения достига ется за 2 такта уравновешивания, по кольку 121.1.0 2 Для сравнения отметим, что при уравновешивании моста по известному способу минимальное число тактов уравновешивания равно восьми, так как точность измерений Т 0,01% обеспечивается при уравновешивании 4 декадах, а на каждой декаде необходимо два такта уравновешивания Таким образом, предлагаемый способ уравновешивания обеспечивает в 4 раза большее быстродействие, чем известный. ЦИ.ФРОВОЙ экстремальный мост пер менного тока, уравнЬвешиваемьпЧ по предлагаемому способу, содержит 04 генератор 1 синусоидального напряжения, мостовую измерительную схему 2, внутренняя структура которой удовлетворяет требованию ортогональности линий уравновешивания, амплитудный детектор 3, квадратор 4, анализатор 5 приращений, преобразователь 6 напряжения в число импульсов, реверсивный счетчик 7, триггер 8 реверса, модулятор 9 и блок 10 управления. Мост работает следующим образом. Сигнал неравновесия лостовой измерительной схемы 2 подвергается амплитудному детектированию, а затем возведению в квадрат. Эти функции вьтолняются детектором 3 и квадратором 4 моста. Его уравновешивание синхронизируется блоком 10 управления. При появлении разрешакнцего сигнала на одном выходе этого блока в анализаторе 5 приращений осуществляется запоминание текущего значения квадрата сигнала неравновесия моста, например напряжения постоянного тока. При подаче разрешающего сигнала с другого выхода блока 10 управления на вход модулятора 9 последний осуществляет пробное изменение регулируемого параметра мостовой цепи, ее выходной сигнал получает определенное модуляционное приращение, содержащее информацию о состоянии мостовой цепи. Новое значение сигнала неравновесия также подвергается амплитудному Детектированию, возведению в квадрат, а затем запоминается в анализаторе 5 приращений. Одновременно в этом блоке производится определение величины и знака модуляционного приращения квадрата амплитуды сигнала неравновесия. Если знак этого -приращения положительный, то из анализатора 5 подается импульс на триггер 8 реверса, изменякяций направление счета реверсивного счетчика 7. Затем приращение квадрата амплитуды преобразуется в преобразователе 6 напряжения в число импульсов./Последовательность импульсов, поступаю щих с выхода преобразователя 6 на вход реверсивного счетчика 7, изменяет состояние как этого счетчика, так и коммутируемых элементов мостовой измерительной схемы 2, приближая ее к состоянию равновесия. Степень приближения зависит от инстру. ментальной погрешности определен1Л состояния равновесия моста. При ,
недостаточной точности описанной процедуры она может быть повторена. По окончании уравновешивания моста цифровое значение выходного кода реверсивного счетчика 7 равно измеряемому параметру комплексного сопротивления.
Использование способа автоматического уравновешивания цифровых экстремальных мостов переменного тока позволяет повысить быстродействие этих приборов примерно в 4 раза по сравнению с известными наиболее быстродействукивдши приборами при сохранении их точности.
Формула изобретения
Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока с ортогональными линиями уравновешивания, при котором модулируют регулируемый параметр, детектируют сигнал неравновесия моста до и после модуляции, по
знаку модуляционного приращения определяют направление регулирования, отличающийся тем, что, с целью повышения быстродействия, полученный после детектирования сигнал возводят в квадрат, измеряют модуляционное приращение квадрата про-, детектированного сигнала и изменяют регулируемый параметр на величину, пропорциональную этому приращению.
Источники информацииJ принятые во внимание при экспертизе
.1. Авторское свидетельство СССР № 756301, кл. G 01 R 17/10, 1978.
2, Авторское свидетельство СССР № 313163, кл. G 01 R J7/10, 1970 (псототип)
