1 ,1
Изобретение относится к строительству и может быть использовано в машинах ударного действия, предназначенных для забивки стальных трубньпс свай большого диаметра.
Целью изобретения является повышение мощности и надежности работы молота
На фиг.1 изображен свайный молот, общий вид, и принципиальная схема управления; на фиг, 2 - захват для ударника
Свайный молот включает ударник 1, подвижно установленный на направляющих штангах 2 посредством антифрикционных втулок 3„ Верхние концы направляющих щтанг 2 соединены траверсой 4, а в нижней части штанги 2 присоединены к наголовнику 5, снабженному крьшжой 6 и амортизирующей прокладкой 7. В наголовнике размещен с возможностью поступательного перемещения шабот 8 с блоком амортизирующих элементов 9.
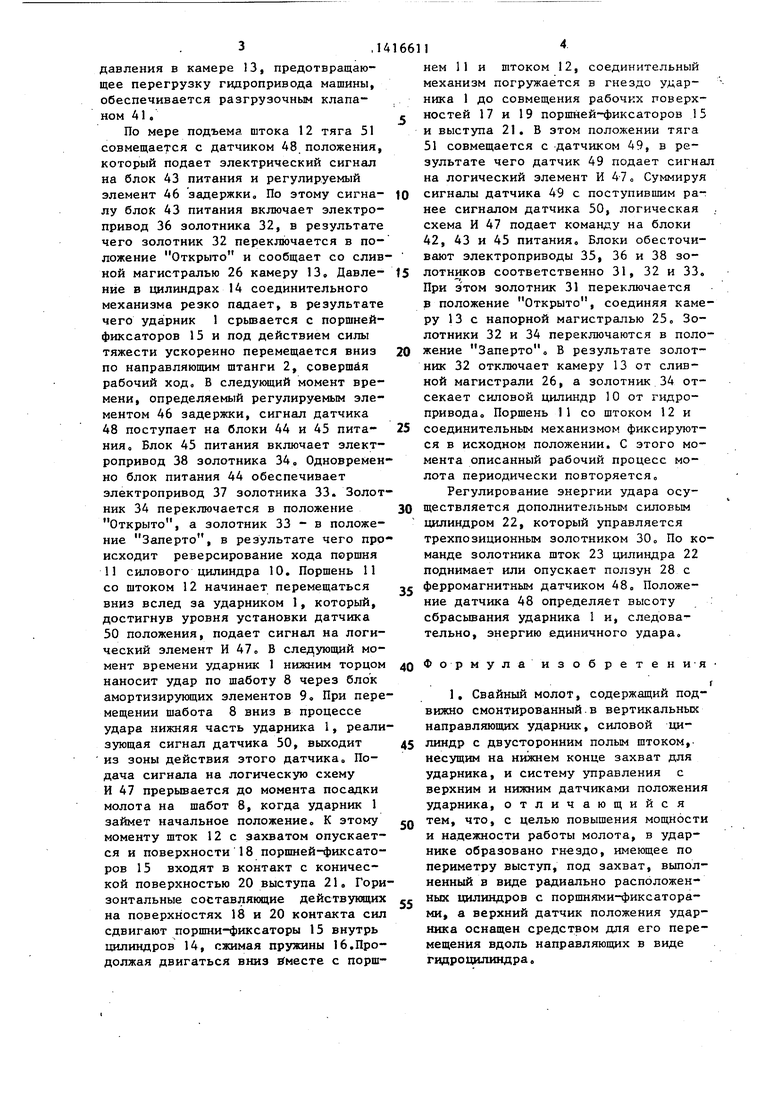
На траверсе 4 шарнирно закреплен силовой цилиндр 10 с поршнем 11 и двусторонним полым штоком 12« Шток 12.в верхней части входит в камеру 13, закрепленную на силовом цилиндре 10о В нижней части шток 12 снабже захватом для ударника 1, вьшолненным в виде радиально установленных и соо щенных с внутренней полостью штока 12 цилиндров 14 с поршнями-фиксаторами 15 и пружинами 16
Каждый порщень-фйксатор 15 имеет рабочий наконечник с коническими поверхностями 17 и 18о Указанные поверхности соответствуют по форме коническим поверхностям 19 и 20 на выступе 21, который выполнен в цилиндрическом гнезде ударника I„
Система управлений свайным молотом состоит из цилиндра 22 со штоком 23, смонтированного на траверсе А, золотникового блока 24, соединенного с напорной 25 и сливной 26 магистралями гидропривода молота, и системы 27 питания и управления. Шток 23 цилиндра 22 щарнирно соединен с ползуном 28, установленным на направляющей 29, прикрепленной к траверсе 4.
Золотниковый блок 24 включает трехпозиционный с рычажным приводом золотник 30 1:у1линдра 22 и группу автоматически управляемых, например двухпозиционных, золотников 31 - 34 с электроприводами соответственн в
112
35 - 38. В линию 39, сообщающую золотниковый блок 24 с камерой 13 машины, встроен бесконтактный, например индукционный, датчик 40 давления и разгрузочный клапан 41, сообщающий линию 39 со сливной магистралью 26 о
Система 27 питания и управления
содержит блоки питания 42 - 45 электроприводов 35 - 38 и золотников 31 - 34, регулируемый элемент 46 .задержки, логический элемент И.47, бесконтактные, например ферромагнитные,
датчики 48-50 положения. Датчик
48размещен на ползуне 28, Датчик
49закреплен в нижней части направляющей 29, Датчик 50 закреплен на крьщ1ке 6 наголовника 5. Для управления датчиками 48 и 49 на нижнем конце штока 12 смонтирована тяга 51 из магнитной стали.
Свайный молот работает следующим обра зомо
При запуске свайного молота рабочая жидкость из напорной магистрали 25 через золотник 31, находящийся в положении Открыто, поступает в камеру 13 и оттуда через полый шток
12 в цилиндры 14 захвата. Давление в цилиндрах 14- резко возрастает и, следовательно, увеличивается усилие контакта поверхностей 17 и 19 поршней фиксаторов 15 с выступом 21, Когда
давление в камере 13 достигнет значения, при котором контактное усилие на поверхностях 17 и 9 станет достаточным для подъема ударника 1, срабатывает датчик 40 давления По его
сигналу блоки 42 и 44 питания подают питание к электроприводам 35 и 37 золотников 31 и 33. Золотник 31 переключается в положение Закрыто и перекрьшает доступ рабочей жидкости в цилиндры 14. Золотник 33 переключается в положение Открыто и сообщает подпоршневую полость силового цилиндра 10 с напорной 25, а надпоршневую полость - со сливной 26
магистралями гидропривода молота. Под действием давления рабочей жидкости поршень 11 со штоком 12 уст- ремпяется вверх, поднимая ударник 1, который удерживается на штоке поршнями-фиксаторами 15. Перемещаясь вверх, тело штока 12 входит в камеру 13, что вызьшает изменение ее объема и, следовательно, давления рабочей жидкости в ней. Постоянство
3,1
давления в камере 13, предотвращающее перегрузку гидропривода машины, обеспечивается разгрузочным клапаном 41.
По мере подъема штока 12 тяга 51 совмещается с датчиком 48 положения, который подает электрический сигнал на блок 43 питания и регулируемый элемент 46 задержки. По этому сигна- лу блок 43 питания включает электропривод 36 золотника 32, в результате чего золотник 32 переключается в положение Открыто и сообщает со слив ной магистралью 26 камеру 13, Давле- ние в цилиндрах 14 соединительного механизма резко падает, в результате чего ударник 1 срьшается с поршней- фиксаторов 15 и под действием силы тяжести ускоренно перемещается вниз по направляющим штанги 2, совершая рабочий ход, В следующий момент времени, определяемый регулируемым элементом 46 задержки, сигнал датчика 48 поступает на блоки 44 и 45 пита- ния. Блок 45 питания включает электропривод 38 золотника 34, Одновременно блок питания 44 обеспечивает электропривод 37 золотника 33. Золотник 34 переключается в положение Открыто, а золотник 33 - в положение Заперто, в результате чего происходит реверсирование хода поршня 11 силового цилиндра 10. Поршень 11 со штоком 12 начинает перемещаться вниз вслед за ударником 1, который, достигнув уровня установки датчика 50 положения, подает сигнал на логический элемент И 47, В следующий момент времени ударник 1 нижним торцом наносит удар по шаботу 8 через блок амортизирующих элементов 9, При перемещении шабота 8 вниз в процессе удара нижняя часть ударника 1, реализующая сигнал датчика 50, выходит из зоны действия этого датчика. Подача сигнала на логическую схему И 47 прерывается до момента посадки молота на шабот 8, когда ударник 1 займет начальное положение, К этому моменту шток 12 с захватом опускается и поверхности 18 поршней-фиксаторов 15 входят в контакт с конической поверхностью 20 выступа 21, Горизонтальные составляющие действуницих на поверхностях 18 и 20 контакта сил сдвигают поршни-фиксаторы 15 внутрь цилиндров 14, сжимая пружины 16.Продолжая двигаться вниз имеете с порш14
нем 11 и штоком 12, соединительный механизм погружается в гнездо ударника 1 до совмещения рабочих поверхностей 17 и 19 поршней-фиксаторов 15 и выступа 21. В этом положении тяга 51 совмещается с датчиком 49, в результате чего датчик 49 подает сигна на логический элемент И 47. Суммируя сигналы датчика 49 с поступившим ранее сигналом датчика 50, логическая схема И 47 подает команду на блоки 42, 43 и 45 питания Блоки обесточивают электроприводы 35, 36 и 38 золотников соответственно 31, 32 и 33, При этом золотник 31 переключается в положение Открыто, соединяя камеру 13 с напорной магистралью 25, Золотники 32 и 34 переключаются в положение Заперто В результате золот- иик 32 отключает камеру 13 от сливной магистрали 26, а золотник 34 отсекает силовой цилиндр 10 от гидропривода Поршень 11 со штоком 12 и соединительным механизмом фиксируются в исходном положении. С этого момента описанный рабочий процесс молота периодически повторяется.
Регулирование энергии удара осуществляется дополнительным силовым цилиндром 22, который управляется трехпозиционным золотником 30„ По команде золотника шток 23 цилиндра 22 поднимает или опускает ползун 28 с ферромагнитным датчиком 48. Положение датчика 48 определяет высоту сбрасьшания ударника 1 и, следова- тельно, энергию единичного удара.
Формулаиз об р е т е ни Я
1, Свайный молот, содержащий подвижно смонтированный.в вертикальных направляющих ударник, силовой цилиндр с двусторонним полым штоком,- несущим на нижнем конце захват для ударника, и систему управления с верхним и нижним датчиками положения ударника, отличающийся тем, что, с целью повышения мощности и надежности работы молота, в ударнике образовано гнездо, имеющее по периметру выступ, под захват, выполненный в виде радиально расположенных цилиндров с поршнями-фиксаторами, а верхний датчик положения ударника оснащен средством для его перемещения вдоль направляюш;их в виде Г1ЗДРОцилиндра,
.
Фие.2
| название | год | авторы | номер документа |
|---|---|---|---|
| СВАЙНЫЙ МОЛОТ | 1989 |
|
SU1780349A1 |
| МОЛОТ СВАЕБОЙНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2184811C1 |
| Свайный дизель-молот | 1987 |
|
SU1452884A1 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
| Свайный молот | 1988 |
|
SU1548343A1 |
| МОЛОТ | 1998 |
|
RU2153556C2 |
| СВАЙНЫЙ МОЛОТ | 1988 |
|
RU1692187C |
| СПОСОБ ИСПЫТАНИЯ УСТРОЙСТВ УДАРНОГО ДЕЙСТВИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2521718C2 |
| Электромагнитный молот | 1985 |
|
SU1537756A1 |
| СВАЙНЫЙ МОЛОТ | 2005 |
|
RU2310723C2 |
Изобретение относится к строительству и позволяет повысить мощность и надежность работы свайного молота, предназначенного для забивки стальных трубных свай большого диаметра. Свайный молот содержит подвижно смонтированный в вертикаль7 3 ных направляющих 2 ударник 1, силовой цилиндр 10 с поршнем 11 и двусторонним полым штоком 12, несущим на нижнем конце захват в виде ради- ально расположенных ц}шиндров 14 с поршнями-фиксаторами 15, В ударнике 1 образовано гнездо для захвата, имеющее по периметру выступ 21, выполненный в виде двух обращенных вершинами одна к другой конусообразных поверхностей 19 и 20, Свайный молот имеет систему управления с верхним 48 и нижними 49 и 50 датчиками положения уда рника 1, причем верхний датчик 48 оснащен средством для перемещения вдоль направляющих 2 в виде гидроцилиндра 22, 1 з,п, ф-лы, 2 ил о О CJ5 27 фиг)
| Пневмогидравлический молот | 1973 |
|
SU649791A1 |
