(21)4096347/24-07
(22)04.08.86
(46) 07.09.88. Бнш. №, 33
(71)Саратовский политехнический институт
(72)М.С. Зубрилов, Б.Э. Код и А. В. Фузеев
(53)621.313.13.014.2:621.382(088.8)
(56)Авторское свидетельство СССР № 1020952, кл. Н 02 Р 6/02, 1983.
Авторское свидетельство СССР № 1029369, кл. Н 02 Р 6/02, 1983.
(54)СПОСОБ ТОРМОЖЕНИЯ ПРОТИВОВКЛЮ- ЧЕНИЕМ БЕСКОНТАКТНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
(57)Изобретение относится к электротехнике и может быть использовано в позиционном приводе. Целью изобретения является повьшение надежности и упрощение фиксации вала ротора синхронной машины. Способ торможения противовключением бесконтактного двигателя постоянного тока заключается в том, что,включая с помощью лопгчес- кого блока 10 управления определенную комбинацию ключей 11 - 18 коммутатора 9 по сигналам с датчика 3 положения ротора 2 синхронной машины, осуществляют поочередное подключение соответствующей фазы А-а, В-Ь обмотки 19 якоря синхронной машины. Открытие каждой пары транзисторов для обеспечения торможения противовключением осуществляется с опережением на один межкоммутационный интервал по отношению к режиму противовключением с нейтральной коммутацией, равный такому углу поворота ротора 2 синхронной машины, при котором комбинация сигналов датчика 3 остается неизменной. 2 ил.
4
1чЭ
tN5
СО
Q1
СО
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения бесконтактного двухфазного вентильного электродвигателя | 1989 |
|
SU1721770A1 |
| Способ обнаружения и локализации отказов вентильного электродвигателя | 1988 |
|
SU1640798A1 |
| Способ динамического торможения вентильного электродвигателя | 1985 |
|
SU1317629A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Вентильный электродвигатель | 1988 |
|
SU1571728A1 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
| Вентильный двигатель | 1983 |
|
SU1130970A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2365025C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2006 |
|
RU2311721C1 |
| Способ регулирования частоты вращения вентильного двигателя и устройство для его осуществления | 1988 |
|
SU1679594A1 |

ф1/г.2
Изобретение относится к электротехнике и может быть использовано в системах и устройствах, где требует- dn торможение и последующая фиксация вала ротора двигателя после останова} например, в позиционном приводе.
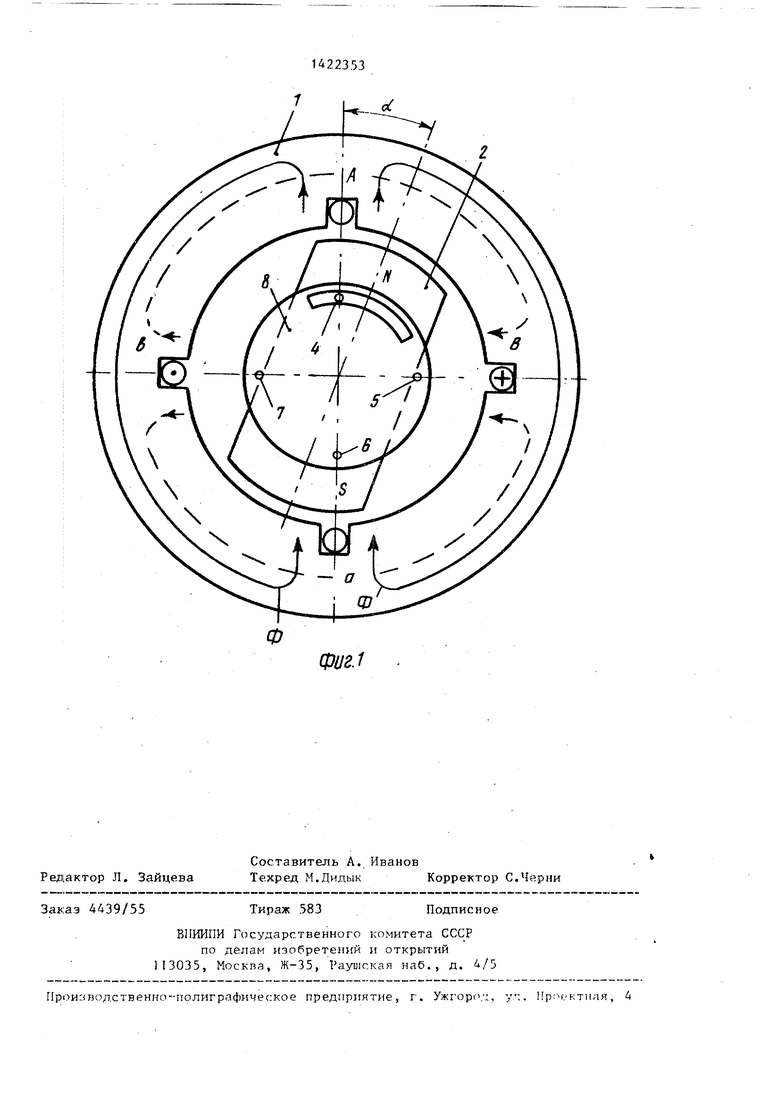
Цель изобретения - повышение надежности и упрощение фиксации вала рото- а синхронной машины. : На фиг. 1 представлена схема взаимного расположения синхронной машины датчика положения ротора синхрон- йой магаины; на фиг. 2 - блок-схема управления вентильным двигателем.
Бесконтактньй двигатель постоянного тока содержит синхронную машину с якорем 1 (фиг, 1) и ротором 2, дат- 1чик 3 положения ротора синхронной машины, вьтолненный на фотодиодах 4-7. Сигнальный элемент 8 датчика 3 вьшол- нен в виде диска с прорезью, равной 190 эл. град. Двигатель содержит также коммутатор 9 (фиг. 2) и логический ;6лок 10 управления, включенный между выходом датчика 3 и входом коммута- 1тора 9, вьтолненного на транзисторах 11-18, соединенных по мостовой схеме. Входные вьтоды коммутатора подключены к зажимам источника питания, а вьгход- ные - к обмотке 19 якоря 1 синхронной машины, имеющей фазы А-а и В-Ь.
Способ торможения нротивовключени ем осу1цествляется следующим образом.
На логический блок 10 управления поступает сигнал с фотодиодов 4-7 датчика 3 положения ротора и сигналы Цд, Un определяющие соответственно левое и правое направления вращения двигателя. Логический блок 10 управления выдает импульсы управления транзистором 11-18 коммутатора 9 в определенной последовательности и со четан1-ш. Если сигнал ТЗд равен логической единице, а сигнал U, логичес- кому нулю, то двигатель вращается против часовой стрелки; если сигнал
Цд О, а сигнал U 1,, то двигатель
При
вращается по часовой стрелке. UA и р О двигатель переходит в тормозной режим, т.е.. наличие логических нулей является сигналом гутя торможения бесконтактного двигателя постоянного тока.
50
степени, что обеспечивается введени ем опережающей коммутации. Угол между векторами этих потоков не пре вышает +360/4pm эл.град, В этом интервале угла комбинация сигналов да чиков положения ротора неизменна. Если до торможения двигатель вращал против часовой стрелки, то от указа ного на фиг, 1 положения ротора 2 д с( О создается двигательный момент вращения, величина которого уменьша ется по мере уменьшения угла ci. Ес ротор 2 по инерщш пройдет нейтраль ное положение, при котором векторы потоков направлены согласно, и угол станет отрицательным, то создается
Пусть перед торможением ротор дви-55 тормозной момент, стремящийся привести угол / к О, т.е. совместить ось полюса ротора 2 с вертикальной
гателя находится в положении, пред- став-пенном на фиг. 1, в этом случае освещен фотодиод 4. Поступает сигнал
осью. Если до торможения двигатель
0
5
„5
0
5
0
0
на торможение. С чувствительного элемента (фотодиода 4) на вход логи- ч.еского блока 10 управления поступает сигнал, равный логической единице, на остальные входы логического блока 10 поступают логические нули. При такой комбинации входных сигналов на выходе логического блока 10 управления появляется такая комбинация сигналов, которая открьгоает транзисторы 15 и 18 коммутатора 9. Открытие транзисторов 15 и 18 осуществляется с опережением на один межкоммутационный интервал по отношению к режиму противовключения с нейтральной коммутацией. Под межкоммутационным интервалом понимаемся угол поворота ротора синхронной машины, при котором комбинация сигналов датчика положения ротора остается неизменной. Начало фазы В-Ь подключается к плюсу источника питания, а ее конец - к минусу источника питания. Ток, протекая по этой фазе обмотки, создает магнитный поток ((сплошная линия, фиг, 1). Магнитный поток якорной обмотки, взаимодействуя с магнитным потоком полюсов ротора 2, создает момент, который стремится повернуть ротор 2 так, чтобы угол о стал равным 0,т.е, создаваемьй момент стремится совместить ось полюса ротора 2 с вертикальной осью,
i Таким образом постоянный ток пропускают по фазе В-Ь такого направления, что создаваемый этой фазой маг- нитньй поток и магнитный поток полюсов ротора совпадают в наибольшей
степени, что обеспечивается введением опережающей коммутации. Угол между векторами этих потоков не превышает +360/4pm эл.град, В этом интервале угла комбинация сигналов датчиков положения ротора неизменна. Если до торможения двигатель вращался против часовой стрелки, то от указанного на фиг, 1 положения ротора 2 до с( О создается двигательный момент вращения, величина которого уменьшается по мере уменьшения угла ci. Если ротор 2 по инерщш пройдет нейтральное положение, при котором векторы потоков направлены согласно, и угол станет отрицательным, то создается
осью. Если до торможения двигатель
вращается по часовой стрелке, то при указанном на фиг. 1 угле d сразу создается тормозной момент, которьй стремится уменыиить угол до О, Если ротор 2 по инерции повернется на угол d больше +360/4рт эл, град, то фотодиод 4 выходит из зоны засветки. Транзисторы 15 и 18 закрываются, т.е. силовой ко1-шутатор 9 отключает фазу В-Ь обмотки якоря.
Предположим, что до торможения двигатель вращается против часовой стрелки. Если он не затормозился при освещении фотодиода 4, то после выхода фотодиода 4 из зоны засветки освещается фотодиод 7. Под действием сигналов логического блока 10 управления отпираются ключ 11 и 14. Коммутатор подключает фазу А-а обмотки якоря к источнику питания так, что момент двигателя стремится совместить ось полюса ротора 2 с горизонтальной осью (фиг. 1, пунктирная линия пото10
Таким образом положительньй эффект достигается за счет соглдсного направления магнитных потоков индуктора и якоря, что при определенном снижении эффективности торможения позволяет повысить надежность торможения, исключив размагничивание индуктора.Кроме Того, упрощается фиксация вала синхронной машины, которая происходит без дополнительных операций управления .
.Ф
15
ормула изобретения Способ торможения противовклю- чением бесконтактного двигателя постоянного тока, вьшолненного в виде синхронной машины с многофазной якорной обмоткой, подключенной к преобразователю частоты, управляемому от датчика положения ротора синхронной машины, при котором, включая определенную комбинацию ключей преобразователя частоты по сигналам датчика
ка tf), т.е. в этом интервале магнит- 25 положения ротора, осуществляют пооче- ный поток ц;, создаваемый фазой А-а, редное подключение соответствующей
20
в наибольшей степени совпадает по направлению с магнитным потоком полюсов ротора (угол сдвига между векторами потоков не превьш1ает +360/4ртэл град). Далее процесс повторяется, до полной остановки ротора.
После окончания торможения по действием тока, протекающего по обмотке, подключенной коммутатором к источнику питания, создается момент двигателя, который фиксирует положение ротора 2. Для уменьшения тока в режиме фиксации ротора 2 может быть применена широтно-импульсная модуля
дня напряжения.
Таким образом положительньй эффект достигается за счет соглдсного направления магнитных потоков индуктора и якоря, что при определенном снижении эффективности торможения позволяет повысить надежность торможения, исключив размагничивание индуктора.Кроме Того, упрощается фиксация вала синхронной машины, которая происходит без дополнительных операций управления .
.Ф
че то си но ра да ма ле ва
15
20
Q
35
40
фазы якорной обмотки синхронной машины к источнику питания, отличающийся тем, что, с целью повьш1ения надежности и упрощения фиксадаи вала ротора синхронной машины, указанное поочередное подключение фаз якорной обмотки синхронной машины осуществляют с углом опережения, равным одному межкоммутационному угловому интервалу, причем за межкоммутационный угловой интервал принимают угол поворота ротора синхронного двигателя, при котором комбинация сигналов датчика положения ротора остается неизменной.
Фиг. 1
Редактор Л. Зайцева
Составитель А. Иванов
Техред М.ДидыкКорректор С.Черни
Заказ 4439/55
Тираж 583
ВИИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, наб. , д. 4/5
Подписное
