Изобретение относится к аналоговой вычислительной технике и предназначено для моделирования электр.омагнитных и электромеханических процессов в вентильном электродвигателе с обмоткгй якоря, секции которой соединены в звезду (лучевая обмотка).
Цель изобретения - повышение точности моделирования.
В основу устройства положена математическая модель (мм), отражающая изменение структуры электромагнитных контуров не только при детерминированном воздействии на ключи преобразователя частоты ВД, но и при изменении проводящего состояния диодов моста обратного тока преобразователя частоты (в том числе и при их
ключении). Проводимость элементов
У1 оста обратного тока определяется
:о 55 араметрами электромагнитного процесса (ЭДС, ток) и однозначно не зави00сит от алгоритма управления ключами
СП преобразователя частоты, режима работы или параметров ВД. .Особенность ММ ВД, описываюи ей тормозные и аварийные режимы, заключается также в необходимости учета большого диапазона изменяюпдихся значений ЭДС вращения, наводимых в электромагнитных контурах. Диапазон изменения ЭДС зависит от исследуемого алгоритма управления ВД.
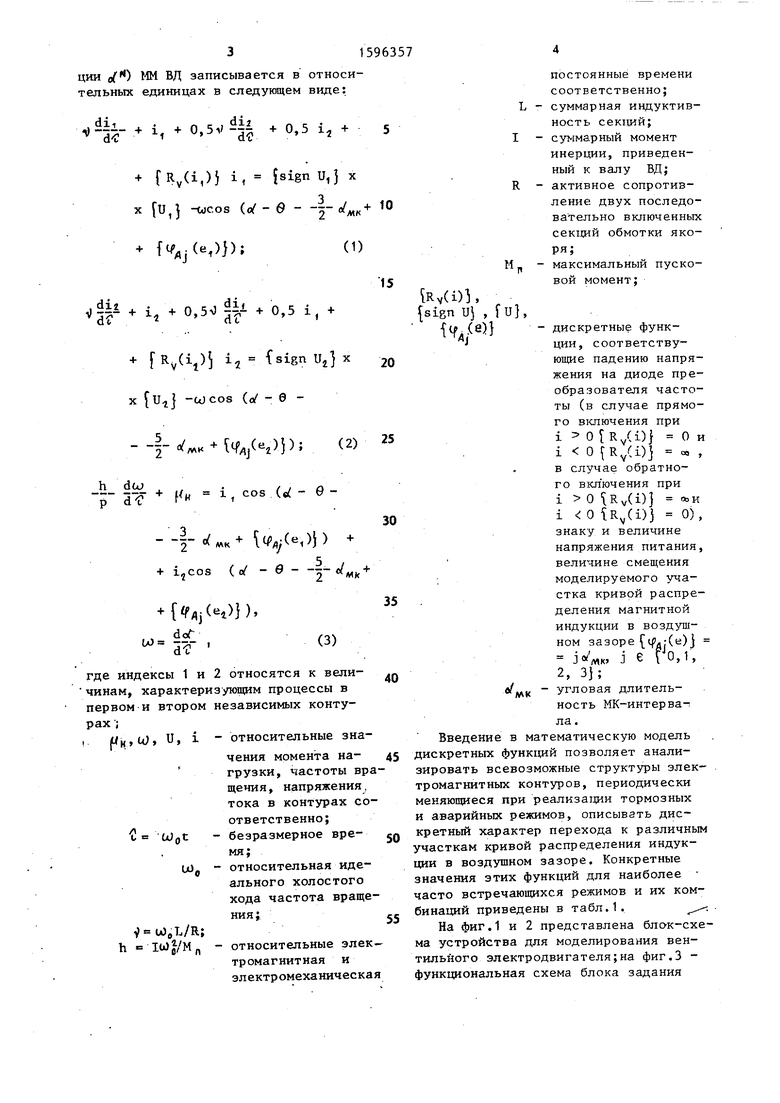
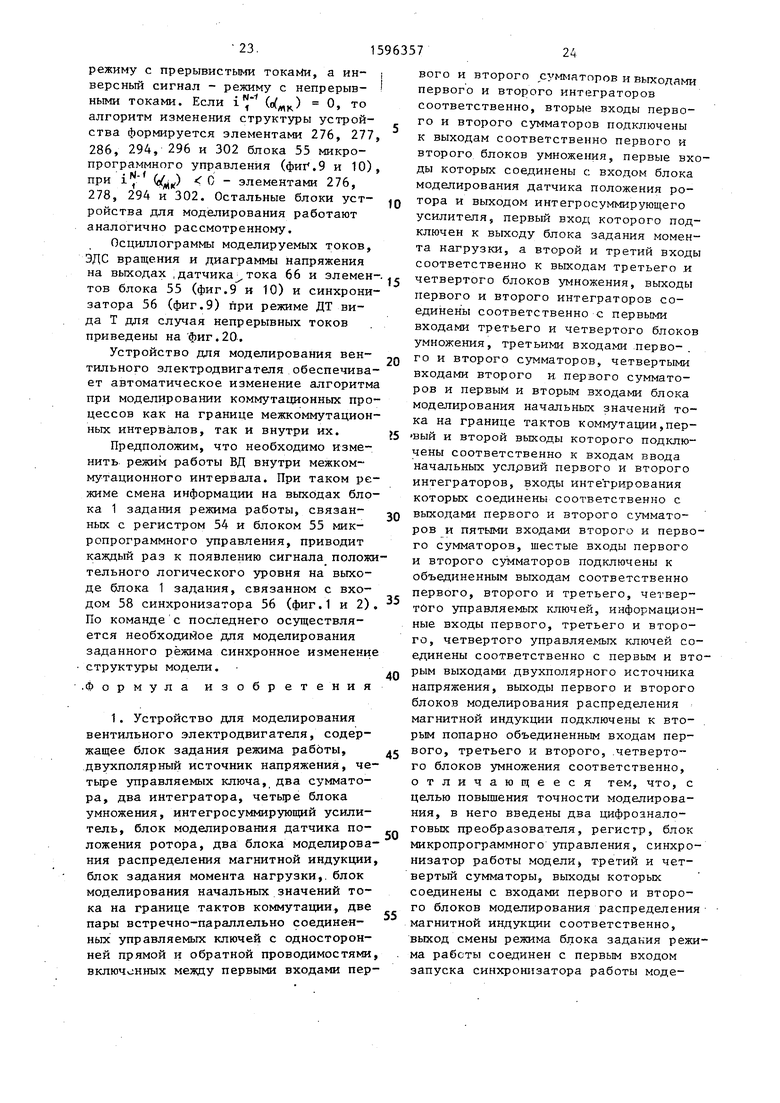
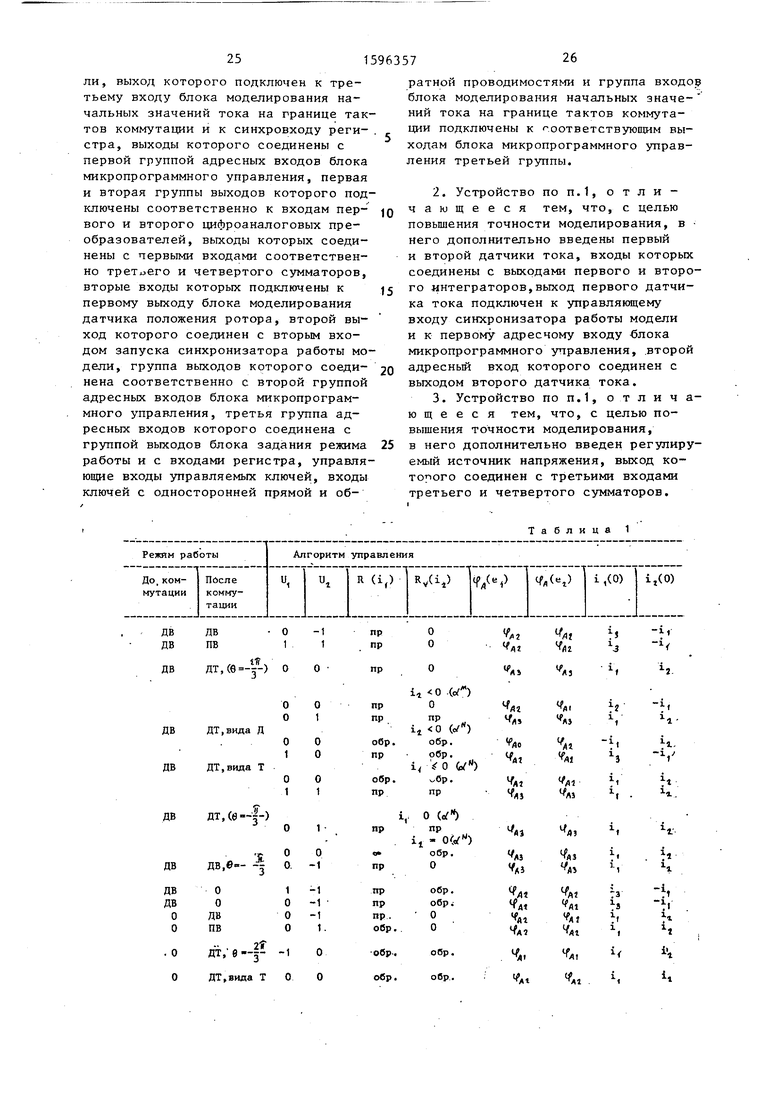
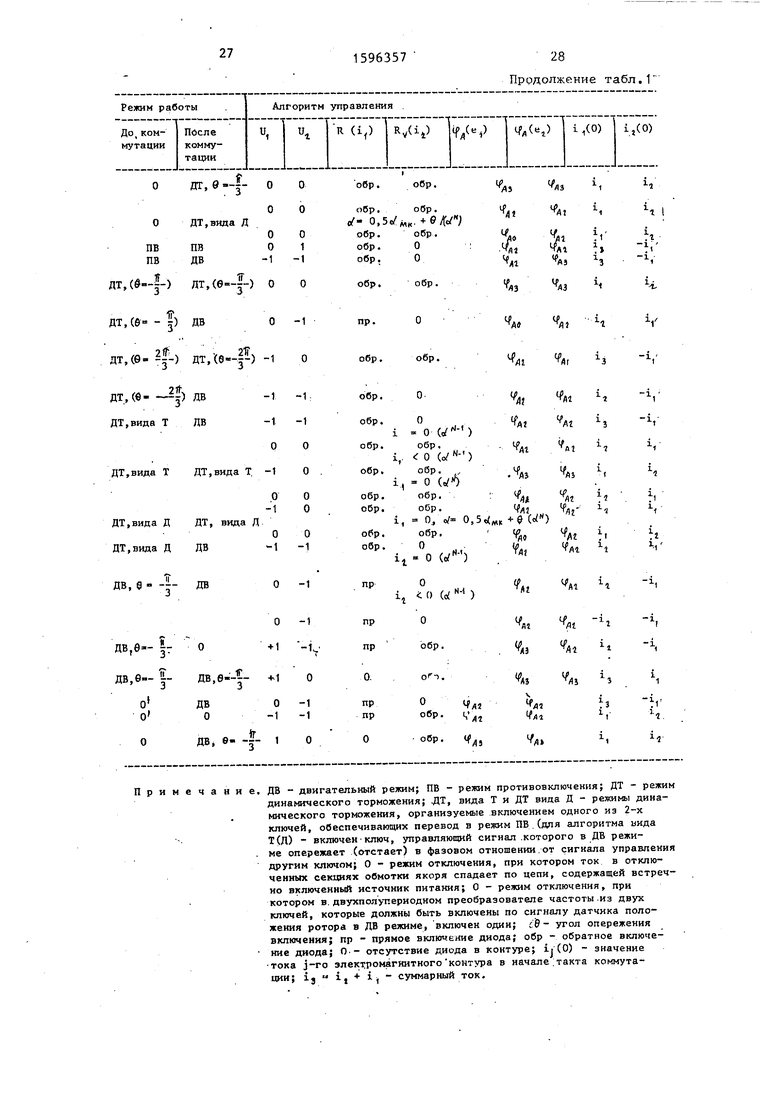
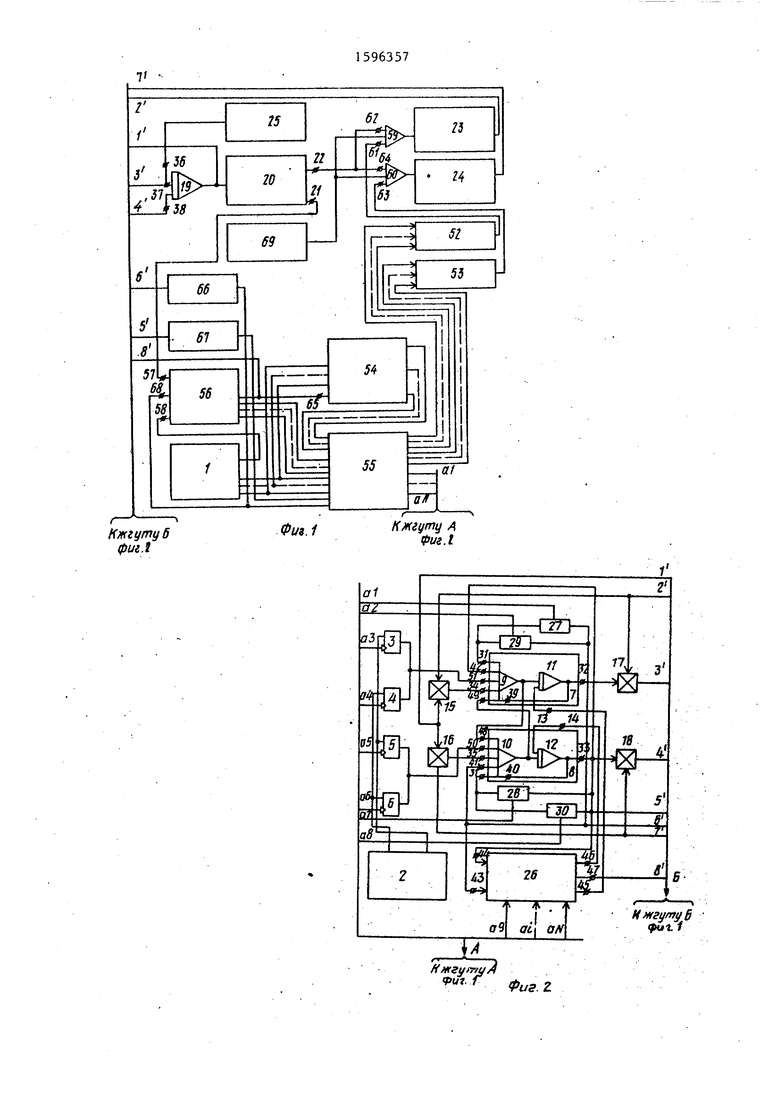
Для произвольного интервала времени t е , t J (такта коммутации (/) IIM ВД записывается в относ тельных единицах в следующем виде: .0,5V% dii + 0,5 i- + dT 4 R/i,)} i, isign U,j X fU,} -tocos (o( - e - - o( .))); . 0,5. Si. + 0,5 i. + + f 2 Sn Uj X X -W cos (fl/ - e - -i- /vsK- K/ PPj(2 u- eW./-i)i) ( 0/ - 0 - -|- «/ () doT U) -7Г dT где индексы 1 и 2 относятся к вели чинам, характеризующим процессы в первом и втором независимых контурах (UK,CJ, U, i -относительные зн чения момента нагрузки, частоты щения, напряжени тока в контурах ответственно; -безразмерное вре мя; относительная ид ального холостог хода частота вра ния ; V u)eb/R; h « iu)J/Mn относительные эл тромагнитная и электромеханичес постоянные времени соответственно; суммарная индуктивность секций; суммарный момент инерции, приведенный к валу ВД; активное сопротивление двух последовательно включенных сек1щй обмотки якоря;максимальный пусковой момент; (i)h gn UJ , fu}, i,/)} дискретные функции, соответствующие падению напряжения на диоде преобразователя частоты (в случае прямого включения при i О lRy(i)j О и i О R/.i) « , в случае обратного включения при i О iRvCi) и 1 О ( 0), знаку и величине напряжения питания, величине смещения моделируемого участка кривой распределения магнитной индукции в воздущном зазоре {if.-(е) - - - ,1. J«MK. J е 2, 3}; угловая длительность МК-интервала. ведение в математическую модель ретных функ1щй позволяет аналивать всевозможные структуры элекагнитных контуров, периодически ющиеся при реализагщи тормозных арийных режимов, описывать дисный характер перехода к различным ткам кривой распределения индукв воздушном зазоре. Конкретные ения этих функций для наиболее о встречающихся режимов и их комций приведены в табл.1. . а фиг.1 и 2 представлена блок-схестройства для моделирования венного электродвигателя; на фиг.З циональная схема блока задания
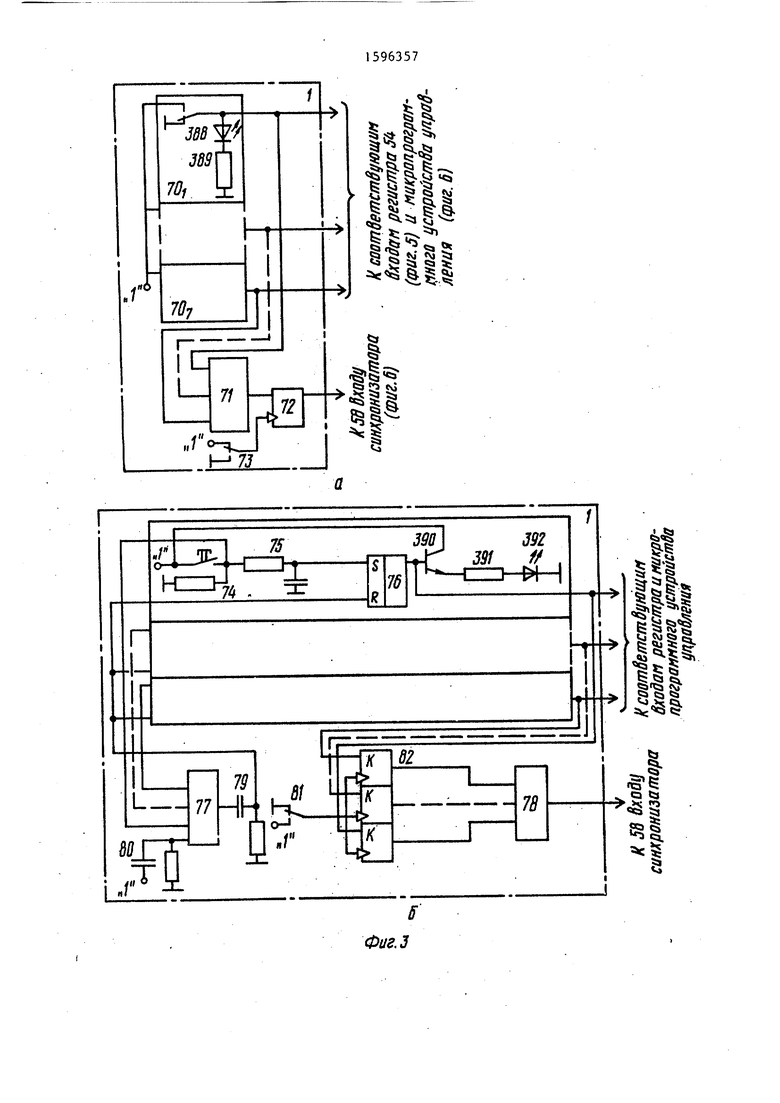
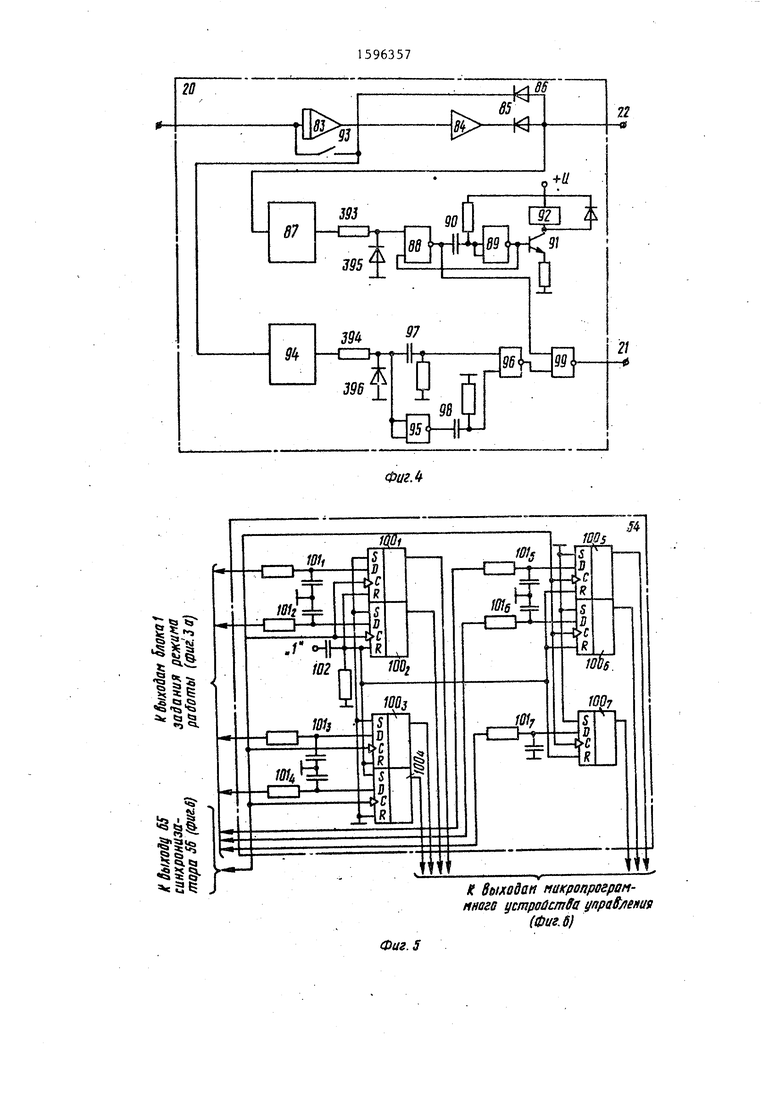
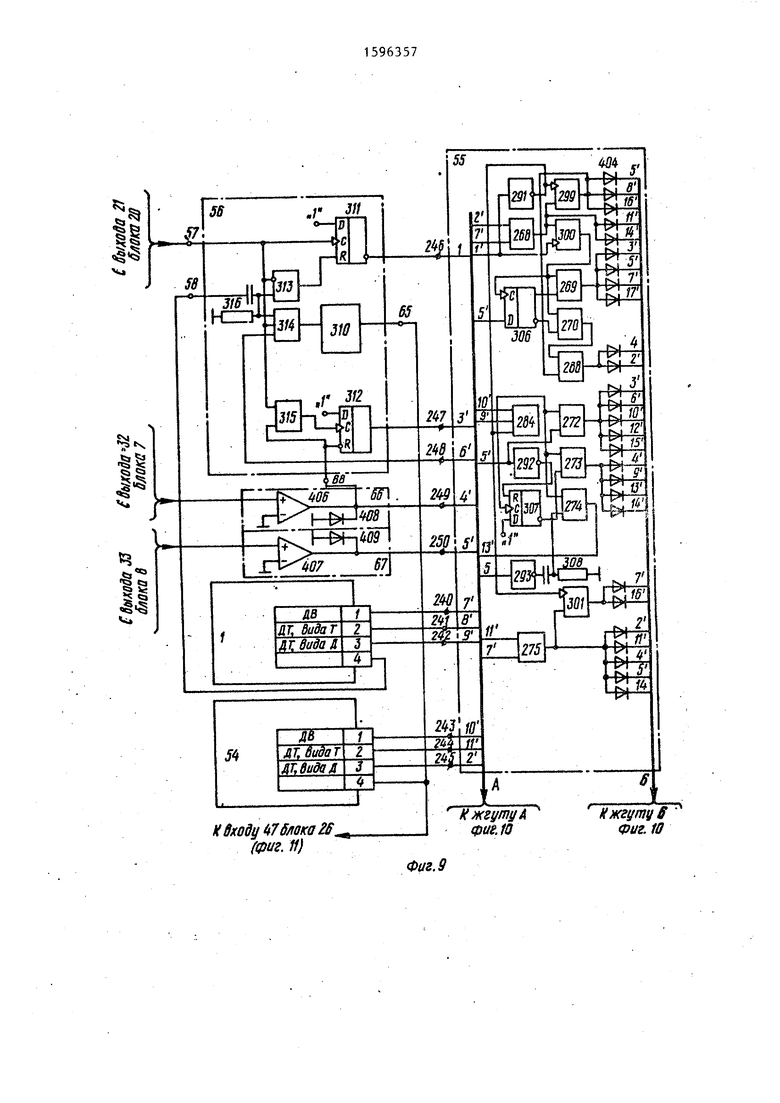
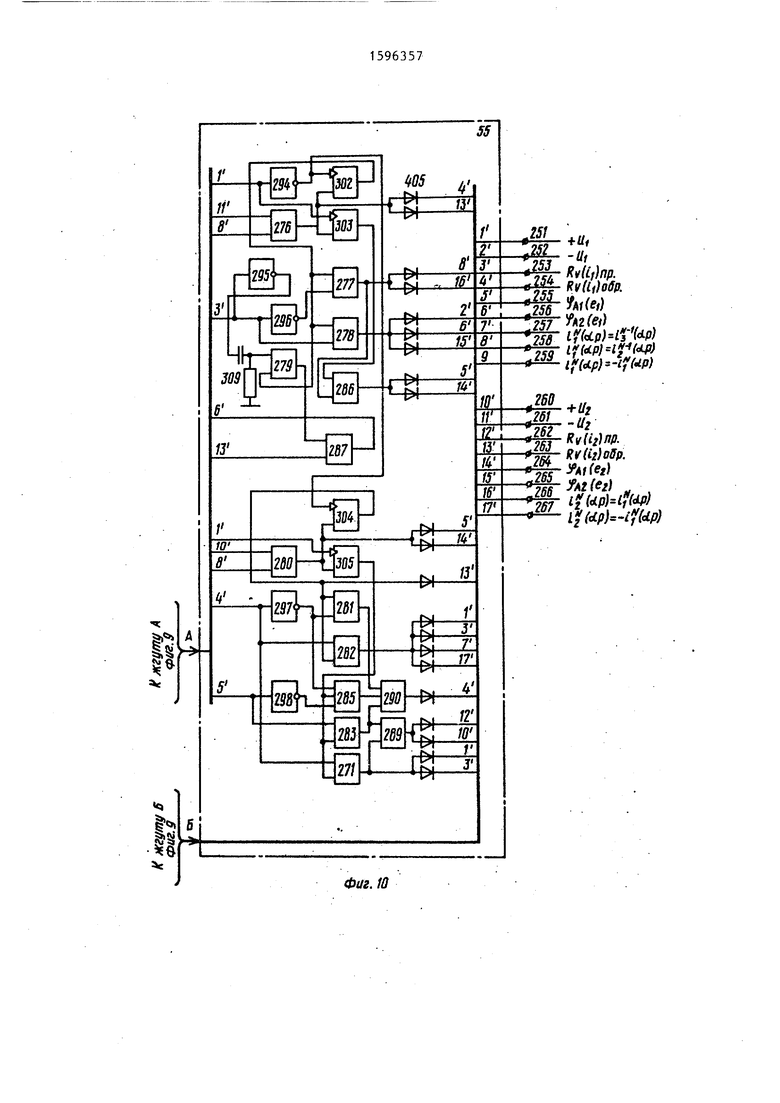
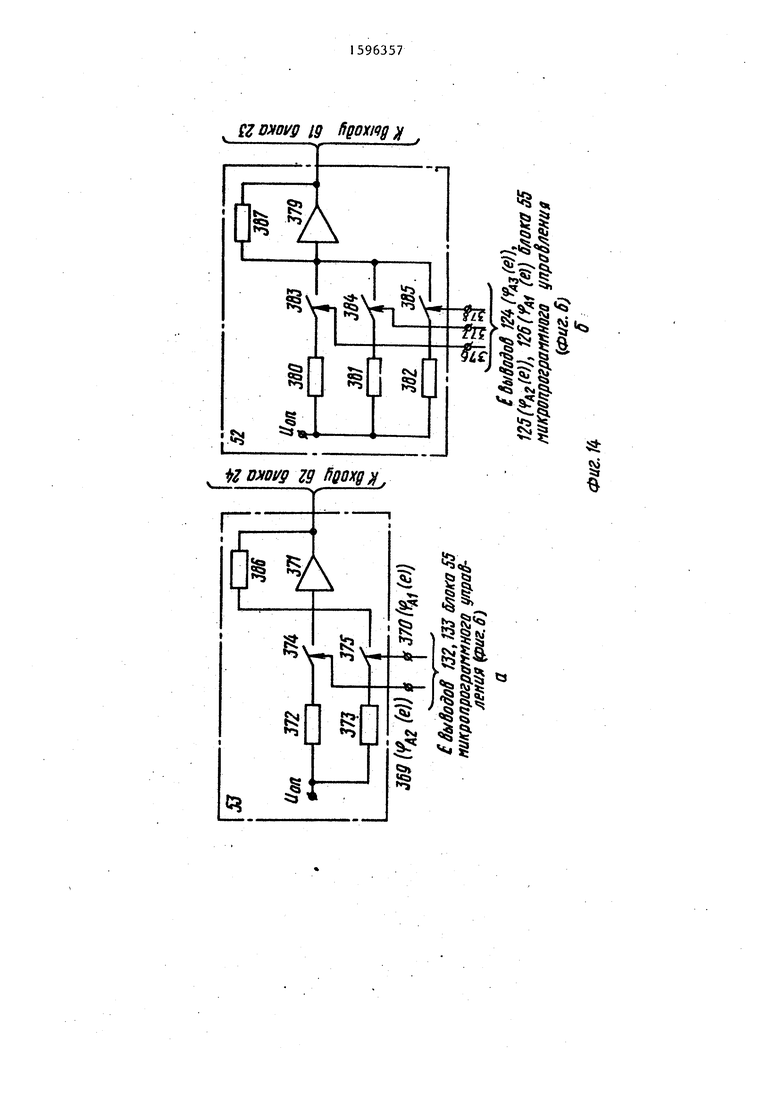
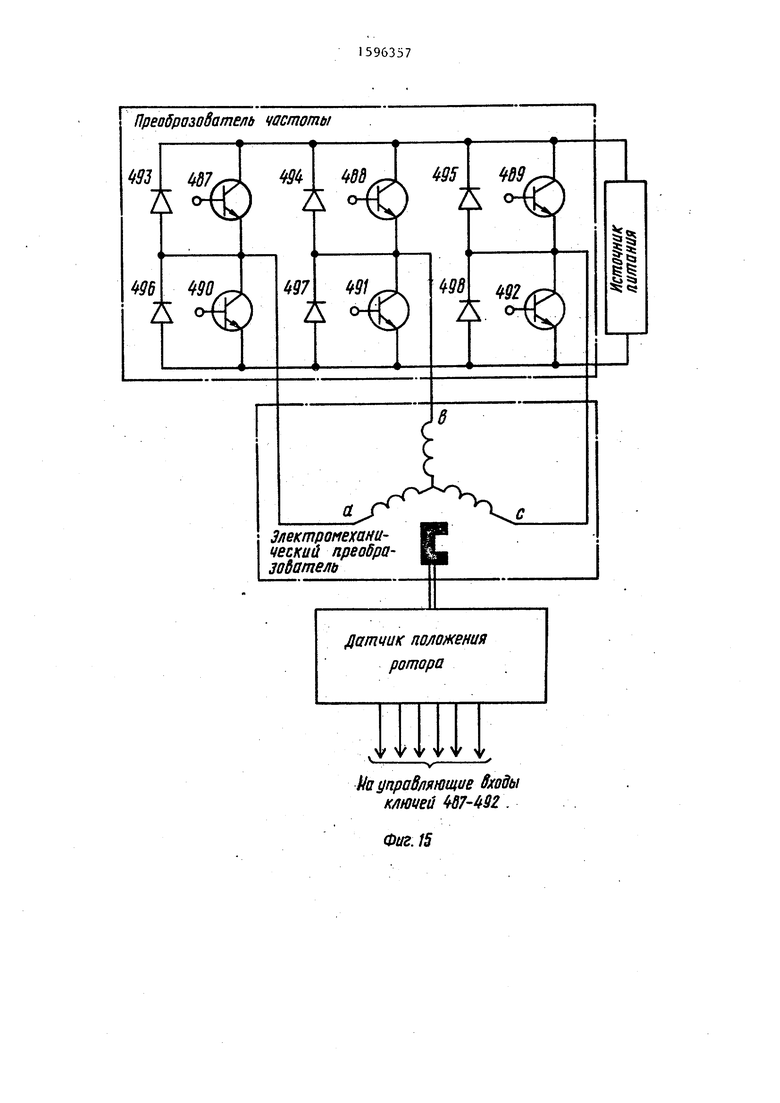
режима работы: а) первый вариант выполнения, б) - второй вариант выполнения; на фиг.4 - функциональная схема блока моделирования датчика положения ротора; на фиг.5 - функциональная схема регистра; на фиг.6 функциональная схема первого варианта вьшолнения блока микропрограммного управления и синхронизатора рабо модели; на фиг.7 и 8 - функциональн схема второго варианта вьшолнения блока микропрограммного управления синхронизатора работы модели; на фиг.9 и 10 - функциональная схема в полнения датчиков тока и третьего в рианта вьшолнения блока микропрограммного управления и синхронизато ра работы модели; на фиг.11 - функциональная схема блоков моделирования электромагнитных процессов контуров и блока моделирования начальных значений тока на границе тактОв коммутации; на фиг.12 - функциональ ная схема второго варианта выполнен блока моделирования начальных значе ний тока на границе тактов коммутации; на фиг.13 - схема подключения дополнительных элементов вводимых в блок моделирования начальных значений тока (фиг.11). для реализации уп равления от блсЗка микропрограммного управления фиг.9, 10; на фиг.14 функциональные схемы цифроаналоговы преобразователей; на фиг.15 - блоксхема вентильного электродвигателя, вьтолненного с трехсекционной, соединенной в звезду обмоткой якоря и двухполупериодным преобразователем частоты; на фиг.16 - электрические цепи в БД на N-M межкоммутационном интервале при ДТ вида Т в режиме прерывистых токов; на фиг.17 i . и ЭДС вращедиаграммы токов е 2 при моделировании режима ния е; ДТ вида Т для случая прерывистых то ков; на фиг.18 - электрические цепи в БД на J-M межкоммутационном интервале при ДТ вида Т в режиме не. прерывных токов; на фиг.19 - осцил лограммы контурных, токов и токов в секциях обмотки якоря при режиме ДТ вида Т для случая непрерывных то ков; на фиг.20 - осциллограммы.моделируемых токов i, ij, ЭДС вращения е,., е. и диаграммы работы элементов микропрограммного устройства управления (фиг.9, 10) и синхронизатора работы модели (фиг.9) при режиме ДТ вида Т для случая непрерывных токов.
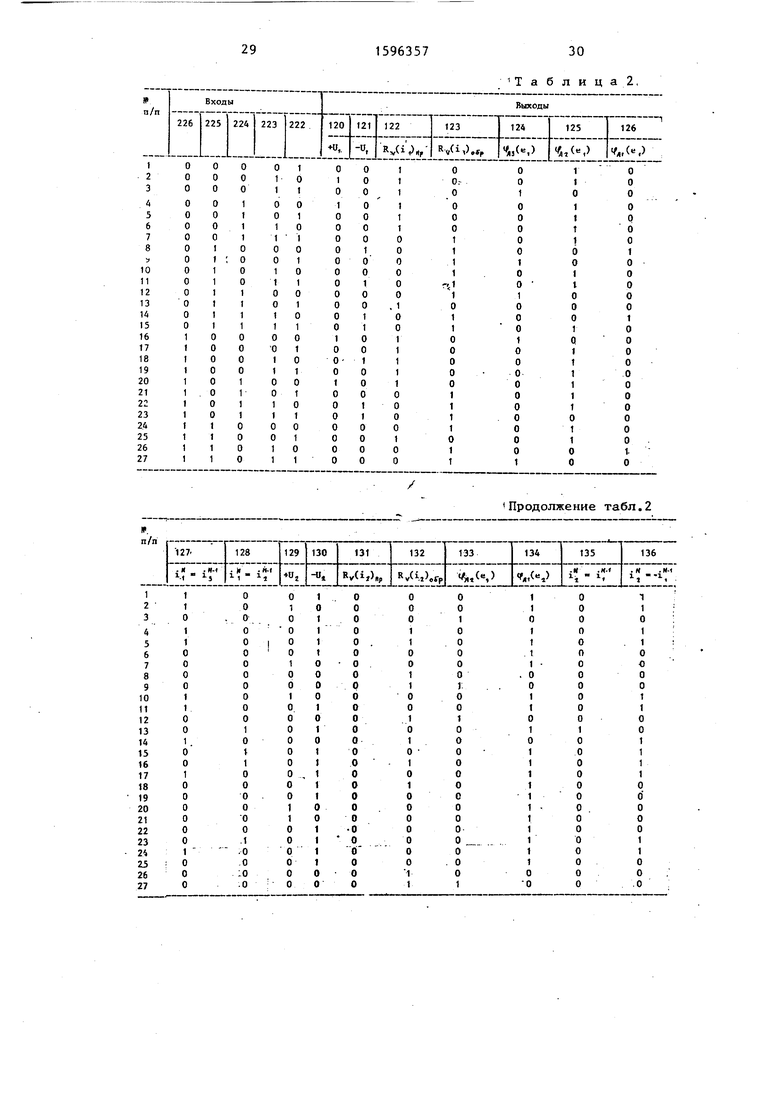
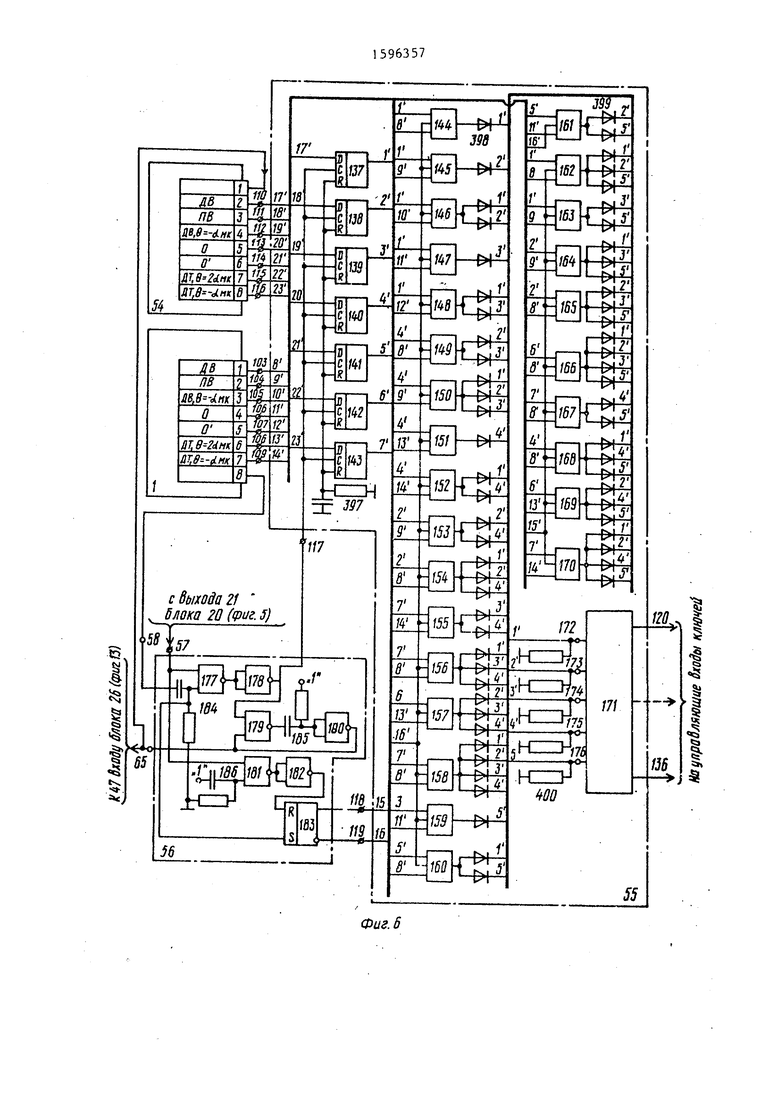
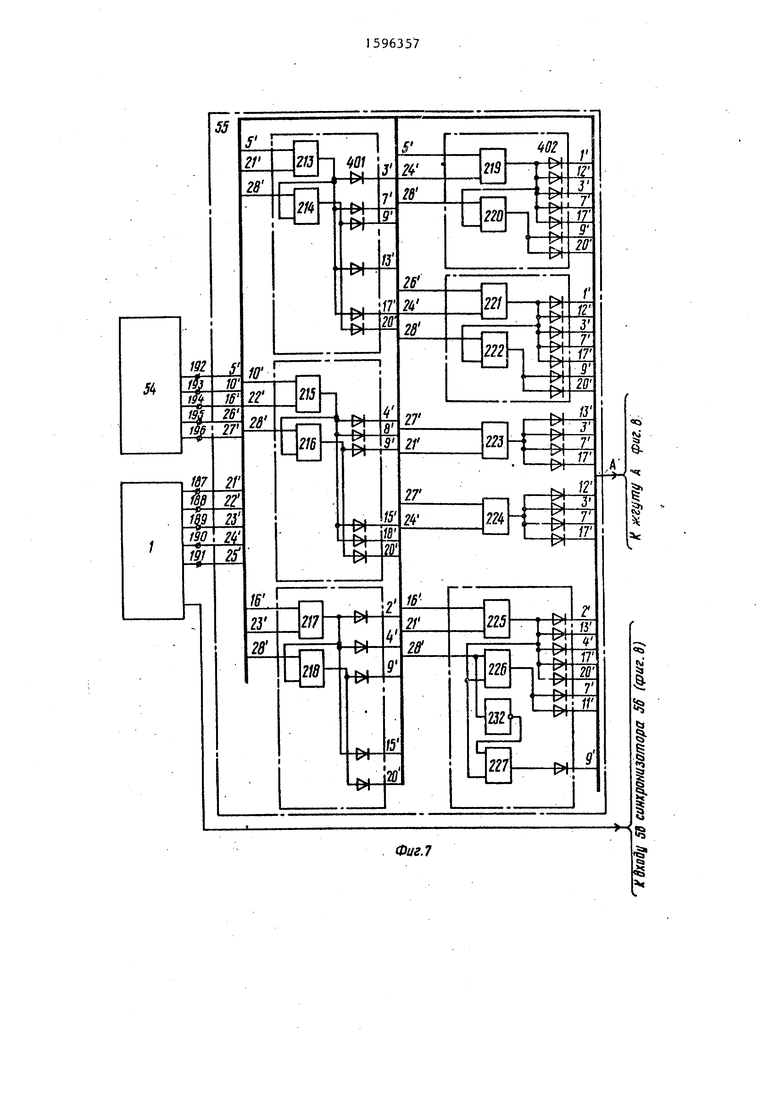
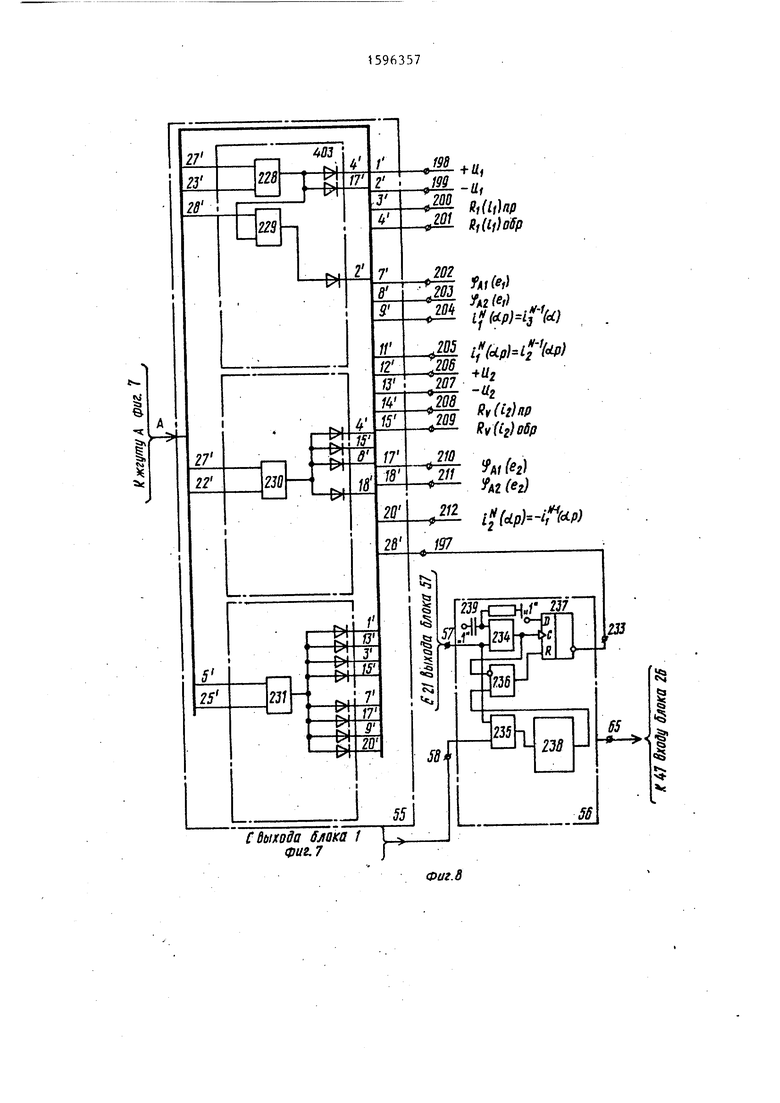
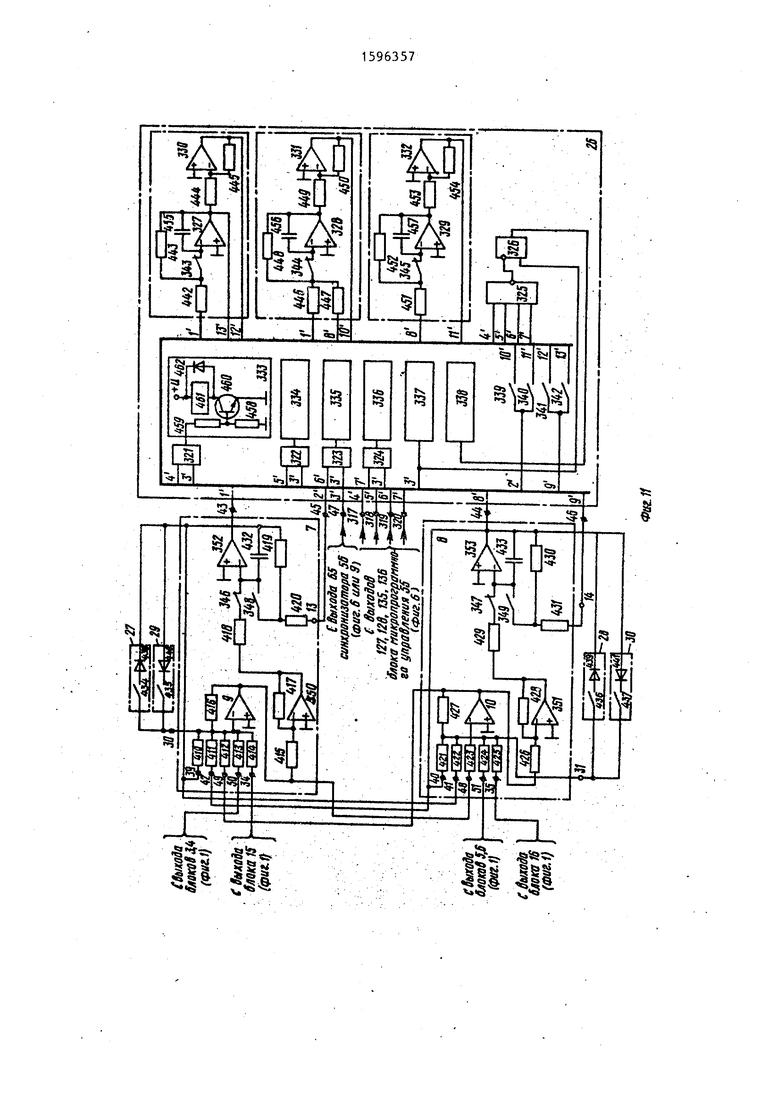
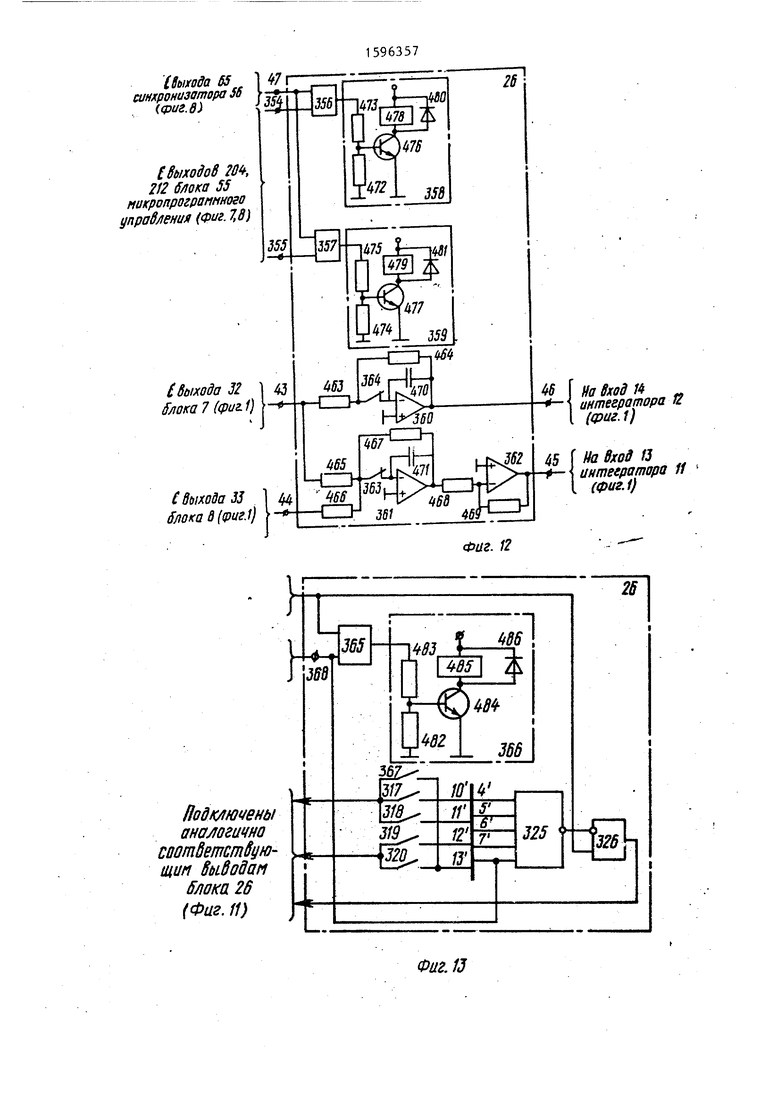
Устройство для моделирования вентильного электродвигателя (фиг.1 и 2) содержит блок 1 задания режима работы, двухполярный источник 2 напряжения, четьфе управляемых ключа 3-6, блоки 7 и 8 моделирования электромагнитных процессов первого и второго контуров, выполненные из сумматора 9 (10) и интегратора 11 (12) с входом 13 (14) для ввода начальных условий, четыре блока 15-18 умноже ия интегросуммирующий усилитель 19, блок 20 моделирования датчика положения ротора с двумя выходами 21 и 22, два блока 23 и 24 моделирования распределения магнитной индукции,блок 25 задания момента нагрузки, блок 26 моделирования начальных значений тока на границе тактов коммутации, две пары управляемых ключей с односторонней прямой 27 (28) и обратной 29 (30) проводимостями, включенных мезвду первым входом 31 (31) и выходом 32 (33) блока 7 (8) моделирования электромагнитных процессов контуров, с вторым входом 34 (35), входы 36-38 интегросуммирующего усилителя, третьи входы 39, 40 первого 9 и второго 10 сум- , маторов, четвертые входы 41 и 42 второго 10 и первого 9 сумматоров, первый 43 и второй 44 входы блока 26, первый 45 и второй 46 выходы и третий вход 47 блока 26, пятый 48 (49) и шестой 50 (51) входы сумматоров 10 (9), два цифроаналоговьтх преобразователя (НАЛ) 52 и 53, регистр 52, блок 55 микропрограммного управления, синхронизатор 56 работы модели с входами 57 и 58 запуска, третий 59 и четвертый 60 сумматоры с входами 61, 62 и 63, 64 соответственно, вход 65 синхронизации регистра 54. Устройство по фиг.1 и 2 может быть дополнительно снабжено двумя датчиками 66 и 67 тока, а синхронизатор 56 работы модели дополнитель-iно снабжен входом 68. Устройство (фиг.1,2) может быть также снабжено регулируемым источником 69 напряжения. Блок 1 задания режима работы по фиг.За содержит семь последовательно-параллельных коммутаторов 70, выполненных с индикацией состояния на их выходе, семивходовый логический элемент ИЛИ 71, управляемый 1 ключ 72 и последовательно-иараллеЛьный коммутатор 73..Блок 1 задания ре жима работы по фиг.Зб содержит 1 последовательных коммутаторов 74, 1 низкочастотных фильтров 75 на основ RC-цепей, 1 RS-триггеров 76, вьтолненных с индикацией выходного состоя НИН, два 1-входовых логических элемента : ИЛИ 77 и 78, две дифференцирующие RC-цепи 79 и 80, последовательно-параллельный коммутатор 81 и 1 управляемых ключей 82. Блок 20 по фиг.4 содержит интегратор 83, инвертор 84, встречно включенные диоды 85 и 86, компаратор 87, формирователь импульсов на базе логических элементов 2ИЛИ-НЕ 88 и 89 и RC-цепи 90, управляемый ключ 91 на транзисторе, реле 92 с нормально разомкнутым контактом 93, .инвертируюпщй триггер 94 Шмитта, два логических элемента 2ИЛИ-НЕ 95 и 96, дифференцирующие RC-цепи 97 и 98 и логический элемент 2И-НЕ 99. Регистр 54 по фиг.5, состоит из семи тактируемых р-триггеров 100 и семи фильтров 101 низкой частоты на основе RC-цепей. Установка триггеров 100 при включении устройства в исход ное состояние .происходит с помощью дифференцирующей RC-цепи 102. Блок 55 микропрограммного управления по фиг.6 обеспечивает моделирование следующих режимов и их комбинаций: двигательного (ДВ)j противовключения (ПВ); двигательного с запаздывающей-коммутацией при О -()(д,(ДВ, 0 -o(, отключения, при котором ток в отключенных секциях обмотки якоря спадает по цепи, со держащей встречно включенный источни питания (0); отключения, при котором в двухполупериодном преобразователе частоты из двух ключей, которые должны быть включены по сигналам датчика положения ротора в ДВ режиме включен один; динами-еского торможеНИН с опережающей & 2о,( (ДТ, 0 2,,) и запаздывающей © - oi мк (ДТ, Э ) коммутацией. Блок 55 микропрограммного управления выполнен с семнадцатью входами 103-119 и семнадцатью выходами 120-136. Входы 103-109 подключены к .соответствующим выходам блока 1, задания режима работы (фиг.За), входы 110-116 - к соответствующим выходам регистра 54 (фиг.5), а входы 117-119 - к соответ 7 ствующим выходам синхронизатора 56 (фиг.6). Блок 55 микропрограммного управления (фиг.6) содержит семь тактируемых П-триггеров 137-143, двадцать семь логических элементов ЗИ 144-170 и постоянное запоминающее устройство 171 с пятью входами 172 176, алгоритм программирования которого приведен в табл.2. При включении устройства установка D-триггеi)OB 137-143 в исходное состояние осу ществляется сигналом с RC-цепи. Выходы логических элементов ЗИ 144 170 связаны с соответствующими входами 172-176 постоянного запоминающего устройства 171 через развязывающие диоды. Выходы постоянного запоминающего устройства 171 являются выходами 120-136 блока 55 микропрограммного управления. Синхронизатор 56 работы модели выполнен с двумя входами 57 и 58 и тремя выходами, он содержит шесть логических элементов 2ИЛИ-НЕ 177-182, RS-триггер 183 и три RC-цепи 184-186. Блок 55 микропрограммного управления по фиг.7 и 8 обеспечивает моделирование следующих режимов и их комбинаций: ДВ, ДТ при 0 о(,; ДТ при 2o(f, ПВ, 0. Блок 55 выполнен с одиннадцатью .входами 187-197 и пятнадцатью выходами 198-212. Входы 187-191 могут быть подключены к- соответствующим выходам блока 1 задания режима работы, выполненного с шестью выходами согласно схеме на фиг.Зб, входы 192-196 к соответствующям информационным входам пятиканального регистра 54, синхронизированного по заднему фронту и выполненного по любой известной схеме, а вход 197 - к соответствующему выходу синхронизатора 56, показанного на фиг.8. Блок 55 микропрограммного управления по фиг.7 и 8 содержит девятнадцать, логических элементов 2Н 213-231 и инвертор 232. Выходы логических элементов 2И 213-231 подключены к соответствующим выходам 198-212 блока 55 микропрограммного управления 55 через развязывающие диоды. Синхронизатор 56 (фиг.8) выполнен с двумя входами 57 и 58 и двумя выходами 62 и 233, и содержит логические элементы 2ИЛИ 234 и 235 ЗАПРЕТ 236, тактируемый D-триггер 237, рдновибратор 238 и КС-цепь 239. В качестве варианта блока 55 микропрограммного управления, имеющего четырнадцать выходов, может быть использован модернизированный блок 55 микропрограммного управления, показанный на фиг.7 и 8. В этом случае блок 55 микропрограммного управления не содержит логических элементов 2И 225-227 и инвертора 232 и имеет выходы 198-204, 206-212. На фиг.9 и 10 показаны функциональные схемы,первого 66 и второго 67 датчлков тока, синхронизатора 56. с входами 57, 58 и 68 и соответствующего им блока 55 микропрограммного управления. В данном конкретном случае блок 55 микропрограммного управления обеспечивает моделирование следующих режимов и их комбинаций: ДВ; динамического торможения, организуемого включением одного из двух ключей, обеспечивающего перевод в ре жим ПВ (для режима ДТ вида Т (Д) включен ключ, управляющий сигнал которого в ДВ режиме опережает (отстает) в фазовом отнощении от сигнала управления другим ключом. Блок 55 микропрограммного управления по фиг. и 10 выполнен с одиннадцатью входами 240-250 р семнадцатью выходами 251-267. Входы 240-242 могут быть подключены к соответствующим входам блока 1 задания режима работы, выпол ненного с четырьмя выходами согласно схеме фиг.Зб, входы 243-245 - к соот ветствующим выходам трехканального регистра, синхронизированного по заднему фронту и вьтолненного по любой известной схеме, входы 246-248 .к соответствующим вьпсодам синхрониза тора, входы 249-250 - соответственно к выходам первого 66 и второго 67 да чиков тока, вьтолненных на базе компараторов. Блок 55 по фиг.9 и 10 содержит логические элементы 2И 268-г283, ЗИ 284 и 285, 2ИЛИ 286-289, ЗШШ 290, инверторы 291-298; управляемые ключи .299-305; D-триггеры 306-307 и RC-цапи 308и 309. Выходы элементов 268, 269, 271-273, 275-278, 280, 282, 286 288-290, 299, 301 и 304 подключены к соответствующим выходам микропрограммного устройства 55 управления (фиг.9,10) через развязьшающие ди.оды. Синхронизатор) 56 (фиг.9) содержит одновибратор 310, два тактируемы D-триггера 311 и 312, логические эле менты ЗАПРЕТ 313, ЗИЛИ 314-, 2И 315. -:, и RC-цепь 316. На фиг.11 показана функциональная схема блоков 7, 8 моделирования электромагнитных процессов контуров и блока 26 моделирования начальных значений тока на границе тактов коммутации. Блок 26 выполнен с семью входами 43, 44, 47 и 317-320. При этом входы 317-320 могут быть подключены к выходам 127, 128, 135 и 136 блока 55 микропрограммного управления (фиг.6) соответственно. В данном- случае блок 26 (фиг.11) содержит логические элементы 2И 321-324, 4ИЛИ-НЕ 325, ЗАПРЕТ 326, три аналоговых коммутатора 327-329 с памятью, три инвертирующих операционных усилителя 330-332 и управляемые реле 333 338. Реле 333-336 имеют по одному нормально разомкнутому контакту соответственно 339-342. Реле 337 выполнено с тремя нормально замкнутыми контактами 343-345. Реле 338 имеет по два нормально замкнутых 346, 347 и гормально разомкнутых 348 и 349 контакта. Блок 7 (8) моделирования электромагнитных процессов первого (йторого) контура (фиг.11) содержит последовательно соединенные шестивходовый сумматор 9 (10) и интегратор 11 (12), включающий инвертирующий операционный усилитель 350 (351) и инвертирующий интегратор 352 (353) с входом 13 (14) для ввода начальньп: условий, выполненный по типовой схеме, КаткдыР из управляемых ключей 27-30 с односторонней проводимостью состоит из последовательно соединенных управляемого переключателя и диода. Для случаев, когда блок 55 микропрограммного управления выполнен с четырнадцатью выходами, как описано вьппг, требуется задание следующих начальных условий для токов в контурах:токов Б электромагнитных контурах в начале, N-ro и в конце (N-1)-го межкоммутационных.ИНТервалов, ij i 1 + i. Функциональная схема блока 26 моделирования начальных значений токов на границе тактов, коммутации может быть выполнена согласно фиг,14. В этом случае блок 26 имеет пять входов 43, 44, 47, 354 и 355 Входы 354 и 355 могут быть,например подключены соответственно к выходам 204 и 212 блока микропрогра много управления,. выполненного согласно схеме фиг.7 и 8 с учетом изме нений описанных ранее и необходимых для вьшолнения его сЧетьфиадцатью выходами. Блок 26 (фиг,12)содержит два логических элемента 2И 356 и 357, два управляемых реле 358. и 359 два аналоговых коммутатора 360 и 36 с памятью и инвертирующий операционный усилитель 362. Реле 358 и 359 имеют каждое по два нормально замкнуты контакта 346 (фиг.11), : 363 (фиг.12) и 347 (фиг.11), 364 (фиг.12) соответственно и по одному нормально разомкнутому контакту 348 и 349 (фиг.11) соответственно. Для случая, когда блок микропрограммного управления выполнен согласно функциональной схеме фиг.9 и 10 и требует задания следующих- начальных условий тока: V . N-1 1(0)6 г («Д .); -ii I 1, (V. (о/,,); if ij(o) е {ij it ( N- / , %1 -1, ((/мк)3 . Функциональная схема блока 26 мо делирования начальных значений тока может быть выполнена согласно фиг.1 но приэтом блок 26 дополнительно содержит логический элемент 2И 365, управляемое реле 366 с одним нормально разомкнутым контактом 367 (фиг.13). При этом первый вход логи ческого элемента 2И 365 служит допол нительным восьмым входом 368 (фиг.1 подключен к выходам 257, 258, 266, 267, 259 блока 55 микропрограммного управления (фиг.9 и 10) соответстве но. На фиг.14 показаны функциональны схемы ЦАП 52 и 53, управляемые по сигналам с блока 55 микропрограммно го управления йо фиг.6. В данном слу чае ДАЛ 53 (фиг.14а) вьтолнен двухразря. и, следовательно, имеет 1 7i2. два входа 369 и 370-управления. Он содержит операционный усилитель 371, два входных резистора 372 и 373 которого подключены параллельно, каждый через управляемый ключ соответ.ственно 374 и 375. Входы управления ключей 374 и 375 являются входами 369 и 370 ЦАП 53 и подключены к выходам 133 и 134 блока 55 микропрограммного управления (фиг.6, табл.1). Резисторы 372 и 373 имеют сопротивления, соотносящиеся между собой как 1:2. 1.1АП 52 (фиг, 146) может быть выполнен трехразрядным и в этом случае имеет три входа 376-378, подключенные к выходам 124-126 блока 55 микропрограммного управления по фиг.6, ЦАП 52 выполнен на операционном усилителе 379, входные резисторы 380 382 которого подключены параллельно, каждый через управляемый ключ соответственно 383-385. Входы управляемых ключей 383-385 являются соответственно входами 376-378, ПДП 52, Резисторы 380-382 имеют сопротивления, соотносящиеся между собой как 1:2:3, В цепь обратной связи операционных усилителей 371 и 379 включены резисторы 386-387. Кроме того, каяодый из последовательно-параллельных коммутаторов 70 (фиг.За содержит светодиод 388 и резистор 389,-.Блок задания режима работы (фиг.Зб) образует 1 транзисторов 390, 1 резисторов 391, 1 светодиодов 392. Блок 20 моделирования датчика положения ротора (фиг,4) содержит резисторы 393 и 394 и диоды 395 и 396. Блок 55 микропрограммного управления по фиг.6 имеет КС-цепь 397,. группы диодов 398 и 399 ,и групп.у резисторов 400. Блок 55 микропрограммного управления по фиг,7 и 8 содержит группы диодов 401 и 402 (фиг,7) и 403 (фиг,8). Блок 55 микропрограммного управления по фиг.9 и 10 состоит из групп диодов 404 (фиг.9), 405 (фиг,10). Датчик тока 66 (67). (фиг,9) выполнен на компараторе 406 (407). и диоде 408 (409), Блок 7 (8) моделирования электромаг-нитных контуров (фиг,11) содержит резисторы 410-420 .(421-431)., конденсатор 432 (433). Каждый ключ 27-30 Хфиг.П) состоит из управляемого переключателя 434-437 и диода 438 441 соответственно. Блок 26 (фиг,11) 131 имеет резисторы А42-454, конденсаторы 455-457, а реле 333-338. указанного блока - резисторы 458, 459, транзистор 460, электромагнитное реле 461 и диод 462. Блок 26 (фиг.12) содержит резисторы 463-469, конденсаторы 470,- 471, а реле 358 (359) указанного блока - резисторы 472,473 (474, 475), транзистор 476 (477), электромагнитное реле 478 (479), диод 480 (481). Реле 366 блока 26 содержит пезисторы 482 и 483, транзистор 484, электромагнитное реле 485 и диод 486. В случаях выполнения блока 55 мик ропрограммного управления по функцио нальной схеме на фиг.7 и 8 или 8 и 9 иДП 52 и 53 выполняются двухразрядными и могут быть реализованы согласно функциональной схеме фиг.14а. Блоки 23 и 24 моделирования распределения магнитной индукции реализованы на блоках нелинейности. В случае синусоидального распределения индукции в воздушном зазоре блоки 23 и 24 имеют следующие выходные характеристики: при выполнении блока 55 микропрограммного управления согласно ф кционапьной схемы на фиг.6 (о - 9 - - + .)}) J е 0;1;2;3}; F,j cos (о( - («гМ). J t0;1;3j; . при выполнении блока 55 микропр граммного управления согласно функ ональным схемам по фиг.7, В или фиг.9, 10 соответственно: F cos (of - 02 мк + Ч-л/Сь,))) , j е 0;1;2): 2 cos (о - е+ ИА( j е {0;1;2j,. Плавное угловое смещение кривой распределения индукции задается уг Q и осуществляется путем подачи с ответствующего величине угла 0 на 7 пряжения на третьи входы суммирующих усилителей 59 и 60. Указанное напря-жение подается с выхода регулируемого источника 69 напряжения. Блок 25 задания момента нагрузки воспроизводит механическую характеристику механизма. При воспроизведении выходной характеристики |Wj,const при CJ var блок 25 может быть реализован на источнике постоянного ; напряжения. При моделировании нагрузки с вентильной характеристикой блок 25 реализуется на базе блока нелиней|1ости. В качестве .интегросуммирующих и суммирующих усилителей, блоков нелинейности, блоков умножения двух переменных, источников напряжения могут быть использованы аналогичные по своему функциональному значению блоки аналоговой вычислительной машины. Блоки моделирования электромагнитных процессов первого 7 и второго 8 контуров построены согласно дифференциальным уравнениям (1) и (2) и воспроизводят электромагнитные процессы в контурах. Например, при исследовании двигательного режима или режима противовключения в них- моделируются нарастающий i и спадающий. 1, токи. Зависимость распределения магнитной индукции в воздушном зазоре вдоль окружности статора для каждого электромагнитного контура реализуется в блоках 23 и 24 моделирования распределения магнитной индукции. Может быть задан синусоидальной,трапецеидальный и др. законы распределения индукции в зазоре. Для формирования сигналов, пропорциональных ЭДС вращения и составляющим электромагнитного момента, используются блоки умножения 15, 16 и 17, 18. На ин-тегросуммирующем усилителе 19 воспроизводится решение уравнения движения электропривода (3). Задание необходимого знака и величины напряжения питания и осуществляется с помощью двухполярного источника 2 на пряжения и ключей 3-6, управляемых по сигналам с блока 55 микропрограммного управления. .Пинамическое задание начальных условий тока приемене структуры электромагнитных контуров осуществляется при помощи блока 26. Указанный блок в момент смены структуры электромагнитных контуров фиксирует значения токов в них и на основании сигналов управления с блока 55 микропрограммного управления задает необходимые начальные условия интеграторам 11 и 12, Управление моделью осуществляется с помощью , блока 1 задания режима работы, определяющего вид или комбинацию исследуемых режимов. Синхронизатор 56, работы модели синхронизирует работу всей модели при смене моделируемого режима на границе или внутри межкоммутационного интервала, а также при смене стру туры моделируемых электромагнитных контуров внутри межкоммутационного интервала по сигналам с датчика тока Блок 55 микропрограммного управления при смене структуры электромагнитных контуров, например, на гра нице межкоммутационных интервалов в. соответствии с информацией о режимах работы на предшествующем и следующем заним тактах коммутации определяет изменения в структуре модели и значения начальных условий электромагнитных процессов.Информация о предшествующем и следующем за ним режима работы поступает с регистра 54 и бло ка 1 задания режима работы соотйет- ственно. При изменении структуры модели внутри такта коммутации дополнительно к указанным в блоке 5.5 микропрограммного управления анализируется информация с синхронизатора 56 и датчиков 66 и 67 тока. На выходе блока 55 микропрограммного управления формируется информация о начальных значениях токов в контурах i..(0). ij(0), о состоянии сигналов управ .ления ключами 27-30 с односторонней проводимостью , (определяется значения ми функций fRy(i)5), ключами 3-6 (оп ределяется, значениями функции {sign UJ) и регистрами 52 и 53 (определяется значениями функций Ц (е) ) На выходе блока 20 моделирования датчика положения ро-гора формируется дискретная информация о прохогвдении ротором электродвигателя углового ин тервала, равного межкоммутационному. Кроме того, в аналоговой форме формируется информация об угловом полож нии ротора на межкоммутационном интервале. Рассмотрим работу устройства для моделирования ВД на конкретном приме ре. Предположим, что ВД выполнен- с элект омеханическим преобразователем с числом пар полюсов р 1, трехсек-. ционной соединенной в звезду обмоткой якоря и двухполупериодным преобразователем частоты, а устройство для моделирования выполнено согласно функциональным схемам на фиг.За; 4; 5; 6; 12; 16. Блок-схема ВД представлена на фиг.15, Он содержит обмотку якоря с секциями а, Ь, си преобразователь частоты, выполненный на шести управляемых ключах и шести диодах моста обратного тока 493-498. Рассмотрим случай моделирования ДВ режима при 0 О с дальнейшим переходом на границах межкоммутационных интервалов последовательно к режиму О , к режиму О и возвращение к ДВ режиму. Такой режим соответствует в реальном ВД пропуску-сигнала управления одним из ключей преобразователя частоты. Управление устройством осуществляется от блока 1 задания режима работы (фиг.За). На фиг,За показано состояние контакторов 70, 73 соответствующее исходному. Для моделирования ДВ режима необходимо переключить коммутатор 70 . При этом на его вьгходе появляется сигнал положительного логического уровня. Указанный сигнал поступает на вход 103 блока 55 микропрограммного управления (фиг.6) и через логический элемент ИЛИ 71, уп-равляемый ключ 72 (фиг,За) на вход дифференцирующей RC-цепи 184 синхронизатора 56 (фиг,6). Сформированый на его выходе импульс устанавливает на прямом выходе 118 RS-триггера 183 синхронизатора 56 сигнал положительного логического уровня и, кроме того, через логические элементы 2Р1ЛИ , 177 и 178, поступает на 117 вход блока 55 микропрограммного управления, обеспечивая перезапись информации с выходов блока 1 на выход триггеров 137-143 соответственно. При подключении устройства к источнику питания импульсом с дифференцирующей цепи 102 (фиг,5) на выходах триггеров 100,,-IOOj, 1005-100 регистра 54 устанавливается сигнал нулевого логического уровня, а на выходе триггера 1004 положительного логического уровня. Указанная совокупность сигналов поступает на входы .110-1-16 блока 55 микропрограмм1 ого управления (фиг.6) и характеризует отключенное состояние ВД в начальный момент времени. Наличие сигналов положительного логического уровня на выходе D-триггера 140 и на входах 103 и 113 блока 55 микропрограммного управления приводит к появлению сигнала положительного логического уровня на выходе логического элемен та И 149 и следовательно на входах 173 и 174 постоянного запоминающего устройства 171. На выходах последнего, а следовательно, и на выходах блока 55 микропрограммного управления формируется совокупность сигналов, обеспечивающих перевод в открытое состояние ключей 6 и 27 (фиг.1), 374 (фиг.14а) и 375 (фиг, 14 состояние остальных управляемых ключей остается без изменений. Это эквивалентно заданию следующих значений свободных членов и коэффициентов дифференциальных уравнений (1) и (2) (см. табл.1): fUj} -1.; Ry(i.)} - прямое включение; ip;,j(ej)} (/мк ;{lP/,j(e,.)j 0;f R(ij-)} О,т.е. диод в контуре отсутствует;, i ,(0) 0; iJCO) О, и моделированию запуска ВД. При поступлении напряжения питания на вход 51 блоха 8 моделирования электромагнитных процессов вт рого контура (фиг.1, 12), на выходе 44 указанного блока появляется ток , который, поступая на блок 17 умножения, определяет составляющую вращающий момент двигателя u-j ( ---), ток i при этом дй . отсутствует и, следовательно, соср, i.,cos (оС + тавляющая момента + -0-) 0. Составляющие вращающего Момента м jWi+ |(2, суммируясь с моментом нагрузки |Дц , на интегросуммирующем усилителе 19. преобразуются в частоту вращения двигателя to, которая, действуя на блок 20 моделирования датчика положения ротора, .превращается в угол поворота ротора of , квантованный на отрезки, равные межкоммутационному интервалу «f При этом на-выходе 22 блока 20 форми руется аналоговый сигнал а,, определяющий угловое положение ротора ВД на межкоммутационном интервале, а на выходе 21 - дискретный сигнал о прохот ении ротором МК-интервала. Пилообразный сигнал t/ , поступая на блоки 23 и 24 формирования распределения магнитной индукции, определяет конкретное значение функций F и F,j дпя текущего положения ротора,которые затем поступают, на блоки умножения 15-18 и совместно с сигналами. W и i|, i J формируют линейные ЭДС вращения: е WF u; cos (of + tocos ( (/- ) , - 2- . e 6JF. и электромагнитные моменты контуров . , . 1 cos (/+ -2-) X ( (У - --|-) Как только и О к 0 О сигналы е и е начинают участвовать в формировании токов i и i. В конце.каждого межкоммутационного интервала на выходе 65 синхронизатора 56 формируется импульс Q, который синхронизирует работу всего устройства на границе названных интервалов. В частности, по этому импульсу происходит перезапись содержимого регистра 54. В рассматриваемом примере в конце первого межкоммутационного интервала на его выходе 110 (фиг.6), характеризующем ДВгрежим, появляется сигнал положительного логического уровня. При вновь сформированной на входах блока 55 микропрограммного управления совокупности ° появляются дополнительные единичные сигналы на его выходах 127 и 136. Это соответствует формированию отличных от рассмотренных ранее начальных условий тока, а именно i,(0) i;(«,) и i(o) -1;(/мк). Рассмотрим работу блока 26 моделирования начальных значений тока на границе тактов коммутации. Для сохранения непрерывности работы модели операция задания начальных условий тока вьшолняется во время изменения структуры устройства. При работе устройства на входы 43 и 44 блока 26 (фиг.11) поступает информация о теку-Щ значении токов i и i. . При поступпении управляющего импульса на вход 47 (в рассматриваемом случае импульс Qj.) она запоминается аналоговыми коммутаторами 327-329 с памятью
На входы 317-320- блока 26 с блока 55 микропрограммного управления поступает информация о требуемых для моделирования заданного режима начальных значениях тока. Указанная совокупность сигналов определяет порядок подключения операционных усилителей 330-332 и аналогового коммутатора 327 к входам 13 и 14 задания начальных условий интеграторов 11, 12 блоков 7, 8 моделирования электромагнитных процессов контуров. В рассматриваемом примере при поступлении импульса Q на входах 317 и 320 блока 20 имеются сигналы положительного логического уровня, а на входах 318 и 319 - нулевого. К источнику питания подключаются катушки реле 333 и 336-338. Размыкаются контакты 343 345 реле 337, обеспечивая запоминание значений токов iJ(//«), itW/wn) ij((/) . Замыкаются контакты 339 и 342 соответственно реле 333 и 336, обеспечивая подключение к входам 14 и 13 задания начальных условий интеграторов соответственно аналогового коммутатора 327, фиксирующего значение тока - itjCc j), и операционного усилителя 331, фиксирующег,о значение тока ) Контакты 346-349 реле 338 обеспечивают перевод интеграторов 352, 353 в режим задания началь.ных условий. Длительность импульса QMK нормирует время задания начальных условий. При этом за счет варьирования длительности .машинного, времени можно исключить погрешность от конечного времени срабатывания клю-. чей и реле. .
На втором межкоммутационном интервале и на последующих в процессе формирования электромагнитного момента в ДВ режиме участвуют оба блока 7, 8 моделирования электромагнитных контуров. Блок 7 моделирует контур со спадающим
током.Ток i(o() спа2НИЯ iJCoi K) , если До
дает до значения конца N-ro межкоммутационного интервала он успевает спасть до нуля, при смене его знака закрывается ключ 27, и ток обратной полярности, как и в реальном ВД, протекать не может. Для того, чтобы смоделировать переход от ДВ-режима к режиму О на границе межкоммутационного интервала, необходимо переключить коммутатор 73 (фиг.За) блока 1 задания режима работ, в положение, при котором на
его вьрсоде появляется сигнал О, коммутатор 70 в исходное положение, а коммутатор 70 включить. При этом | на границе очередного межкоммутационного интервала по и.тульсу Q /ик происходит перезапись измененной информации с блока 1 задания режима работы на выходы D-триггеров 137-143
Q блока 55 микропрограммного управления (фиг.6). Появляется сигнал единичного логического уровня на выходе логического элемента ЗИ 148 и на входах 172 и 174 постоянного запоминающего устройства 171, при этом на входах 173, 175, 176 последнего устанавливаются нулевые сигналы. На выход блока 55 микропрограммного управления считывается информация о соQ стоянии сигналов управления ключами и регистрами устройства, необходимая для моделирования названного режима. Принцип работы узлов устройства при этом не отличается от описанного.Для
5 моделирования на следуЕ 11цем межкоммутационном интервале режима О необходимо в течение текущего межкоммутационного интервала выключить коммутатор 70д и включить коммутатор
0 70 блока 1 задания ре:кима работы
(фиг.За). Далее при переходе к режиму О необходимо вновь изменить состояние коммутаторов блока 1, а именно выключить коммутатор 765- и вклюе чить коммутатор 70, что обеспечивает последую1дий переход к ДВ-режиму. Считывание информации и соответствующие ей изменения алгоритма работы устройства происходят аналогично расQ CMC ренному.
Для иллюстрации работы устройства, алгоритм работы которого определяется величиной токов в контурах, рассмотрим процесс мод(ширования режима ДТ вида Т.
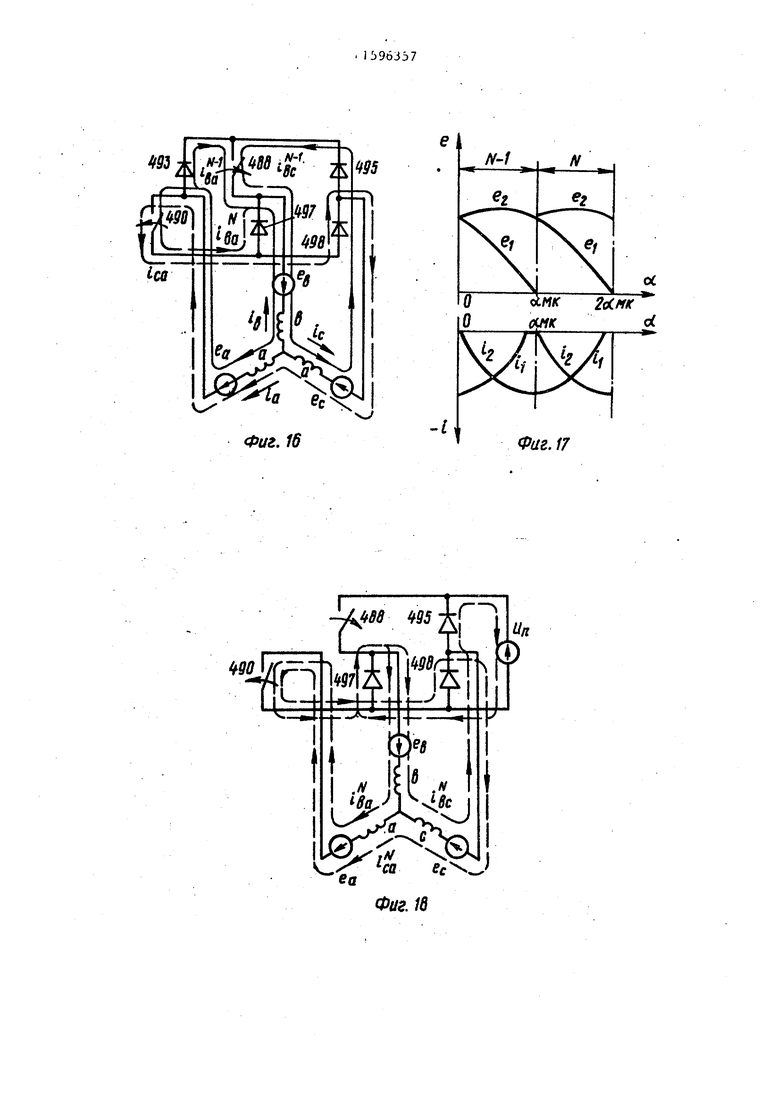
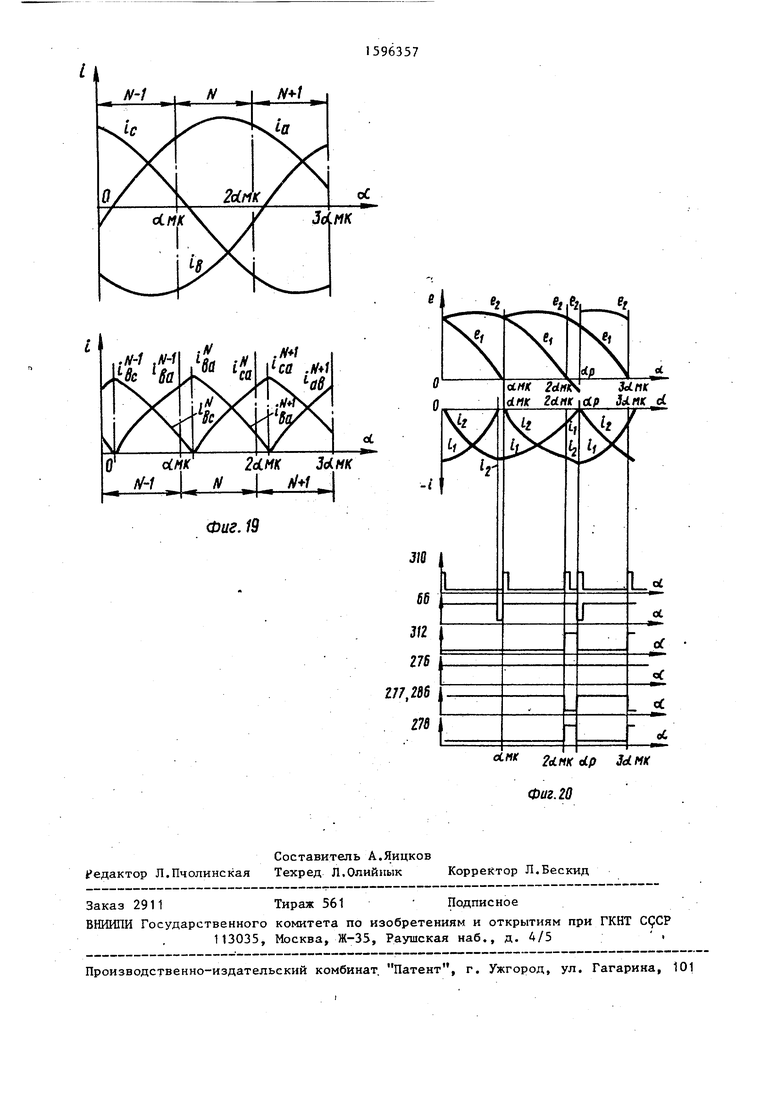
Режим ДТ с алгоритмом управления вида Т характеризуется существованием областей с непрерывными и прерывистыми токами. Рассмотрим алгоритмы управления моделью,реализующие этот режим. На фиг.16 показаны электрические цепи в режиме, прерывистых токов. При этом на чертежах изображены только те диоды и идеальные ключи двухполупериодного преобразователя частоты (фиг.15), которые участвуют в образовании замкнутых: электрических контуров в рассматриваемый интервал | времени. Алгоритм управления устрой2 ством формируется в блоке 55 микропрограммного управления. Блок 55 микропрограммного управления в данном конкретном случае может быть вы полней согласно функциональной схеме на фиг.9 и 10. Входной информацией для блока 55 является информация задания исследуемого режима на N-M меж коммутационном интервале. С выхода :регистра 54 поступает информация о режиме, имеющем место на (N-I)-M интервале. В данном случае режим не ме няется. Анализ электромагнитного про цесса и структуры электрических цепей с коммутационным и нарастающим токами позволяет судить об условиях существования этих цепей, о наличии или отсутствии в них источника питания, значениях ЭДС вращения. Алгорит работы модели в рассматриваемом режи ме реализуются в блоке 55 (фиг.10) на логических элементах 2И 276, 277, 2ИЛИ 286, инвертор 294 и управляемом ключе 302. Управляющие сигналы микропрограммного устройства 55 управления поступают на соответствующие входы управляемых ключей 3-6., 27-30 и 1Щ1 52 и 53. Сигналы задания соответствующего значения начальных условий каждого контурного тока с выхо дов 257-259, 266, 267 блока 55 (фиг.1 поступают соответственно на входы 317, 318, 353, 319, 320 блока 26 моделирования начальных значений тока на границе тактов коммутации, выполненного согласно функциональным схемам на фиг.11 и 13. Значения начальных условий определяются через..значения токов в секциях, участвующих в образовании только одного контурного тока на N-M интервале, в конце (N-1)-ro углового интервала. В режиме прерывистых токов к конц (N-l)-ro межкоммутационного интервала в сек1щях а, Ъ. с обмотки якоря W-1 .-N- - - NВД протекают токи Xg, На N-M угловом интервале контурные токи определяются через токи секций как ifcg i1, 1м ix, так как i(0) Ц (). О ТО i(Q) ii;C)- ic,(0) ). 0 Коммутатц онные токи ( щ) воспроизводятся .на блоке 7 модели-.рования электромагнитных процессов первого контура, а блок 8 моделирует процессы с нарастающими токами (i-t«hlx ,. i pel) во вновь образующихся электрических цепях. При смене межкоммутаци 7 ониого интервала блок 26 моделирова-,. ния начальных значений тока обеспечивает задание начальгых условий iJCO) i -Co,). i(o) ir л,к) Токи i, i., ЭДС вращения е. при моделировании этого режима показаны на фиг.17. Э:1ектрические цепи на N-M межКоммутационном интервале при ДТ с алгоритмом управления вида Т в режиме непрерывных токов показаны на фиг.18. Осциллограммы контурных токов и токов., в секциях а, Ь, с обмотки якоря показаны на фиг.19. Коммутационный ток i замыкается по цепи: диод 497 секции Ь, с - диод 495 - источник питания - диод 497, и протекает под действием ЭДС самоиндукции. После выполнения условия i te О организуется новая цепь: диод 498 секции с, а - ключ 490 - диод 498, по которой протекает нарастающий контурный ток if-ai под действием ЭДС вращения езд. Блок 7 обеспечивает моделирование на (N-0-M межкоммутационном интервале тока ifcc на N-M тока i tc при после вьтолнения - О (фиг.19). Блок 8 обеусловияспечивает моделирование тока i / на (N-1)-M межкоммутационном интервале N f N при i, О и i и токов i i, О на N-M межвыполнения условия коммута1щонном интервале. При смене N-ro и (N-1)-го межкоммутационных интервалов начальные условия для режима прерьтистых токов остаются неизrW/n , N-I /J .W, 1-;,(о) i«- WMK ч W.J, il(0) менными: ,-N- f V «АЛК При i О внутри N-ro межкоммутационного интервала должны быть заданы новые начальные условия iq(o) ), Н(о) - «(«/) и измене-на структура схем набора контуров. Моделирование тока i обеспечивает ся включением управляемого ключа 4 (эквивалентно значению U, j -U) на время изменения значения тока i до нуля. При моделировании режима ДТ вида Т алгоритм работы модели автоматически изменяется при переходе через границу существования непрерывных токов (1 0) . Информацией для изменения алгоритма работы модели служит значение тока i, , фиксируемого д тчиj- у- л..«. ком тока 66 (фиг.9). Уровень О на выходе D-триггера 312 соответствует
режиму с прерывистыми токами, а ин- i версный сигнал - режиму с непрерывными токами. Если i 1{ ) О, то алгоритм изменения структуры устройства формируется элементами 276, 277, 286, 294, 296 и 302 блока 55 микропрограммного управления (фиг.9 и 10), при С/) О - элементами 276, 278, 29Д и 302. Остальные блоки устройства для моделирования работают аналогично рассмотренному.
Осциллограммы моделируемых токов, ДС вращения и диаграммы напряжения на выходах .датчика тока 66 и элемен-. тов блока 55 (фиг.9 и 1C) и синхронизатора 56 (фиг.9) при режиме ДТ виа Т для случая непрерывных токов приведены на фиг.20.
Устройство для моделирования вентильного электродвигателя обеспечивает автоматическое изменение алгоритма при моделировании коммутационных процессов как на границе межкоммутационных интервалов, так и внутри их.
Предположим, что необходимо изменить режим работы ВД внутри межкоммутационного интервала. При таком режиме смена информации на выходах блока 1 задания режима работы, связанных с регистром 54 и блоком 55 микропрограммного управления, приводит каждый раз к появлению сигнала положительного логического уровня на выходе блока 1 задания, связанном с входом 58 синхронизатора 56 (фиг.1 и 2). По командес последнего осуществляется необходийое для моделирования заданного режима синхронное изменение структуры модели, формула изобретения
1. Устройство для моделирования вентильного электродвигателя, содержащее блок задания режима работы, двухполярный источник напряжения, четыре управляемых ключа, два сумматора, два интегратора, четыре блока умножения, интегросуммирующий усилитель, блок моделирования датчика положения ротора, два блока моделирования распределения магнитной индукции, блок задания момента нагрузки,, блок моделирования начальных значений тока на границе тактов коммутации, две пары встречно-параллельно соединенных управляемых ключей с односторонней прямой и обратной проводимоетями, включенных между первыми входами первого и второго сумматоров и выходами первого и второго интеграторов соответственно, вторые входы первого и второго сумматоров подключены к выходам соответственно первого и второго блоков умножения, первые входы которых соединены с входом блока моделирования датчика положения ротора и выходом интегросуммирующего усилителя, первый вход которого подключен к выходу блока задания момента нагрузки, а второй и третий входы соответственно к выходам третьего и четвертого блоков умножения, выходы первого и второго интеграторов соединены соответственно с первыми входами третьего и четвертого блоков умножения, третьими входами перво-. го и второго сумматоров, четвертыми входами второго и первого сумматоров и первым и вторым входами блока моделирования начальных значений тока на границе тактов коммутации,первый и второй выходы которого подключены соответственно к входам ввода начальных услрвий первого и второго интеграторов, входы интегрирования которых соединены соответственно с выходами первого и второго сумматоров и пятыми входами второго и первого сумматоров, шестые входы первого и второго сумматоров подключены к объединенным выходам соответственно первого, второго и третьего, четвертого управляемых ключей, информационные входы первого, третьего и второго, четвертого управляемых ключей соединены соответственно с первым и втрым выходами двухполярного источника напряжения, выходы первого и второго блоков моделирования распределения магнитной индукции подключены к вторым попарно объединенным входам первого, третьего и второго, .четвертого блоков умножения соответственно, отличающееся тем, что, с целью повышения точности моделирования, в него введены два цифрозналоговых преобразователя, регистр, блок микропрограммного зправления, синхронизатор работы модели, третий и четвертый сумматоры, выходы которых соединены с входами первого и второго блоков моделирования распределени магнитной индукции соответственно, выход смены режима блока задания режима работы соединен с первым входом запуска синхронизатора работы модели, выход которого подключен к третьему входу блока моделирования начальных значений тока на границе тактов коммутации и к синхровходу регистра, выходы которого соединены с первой группой адресных входов блока микропрограммного управления, первая и вторая группы выходов которого подключены соответственно к входам первого и второго цифроаналоговых преобразователей, выходы которых соединены с первыми входами соответственно третьего и четвертого сумматоров, вторые входы которых подключены к первому выходу блока моделирования датчика положения ротора, второй выход которого соединен с вторым входом запуска синхронизатора работы модели, группа выходов которого соединена соответственно с второй группой адресных входов блока микропрограммного управления, третья группа адресных входов которого соединена с группой выходов блока задания режима работы и с входами регистра, управляющие входы управляемых ключей, входы ключей с односторонней прямой и обратной проводимостями и группа входор блока моделирования начальных значеНИИ тока на границе тактов коммутации подключены к соответствующим выходам блока микропрограммного управления третьей группы.
2.Устройство по П.1, отличающееся тем, что, с целью повышения точности моделирования, в него дополнительно введены первый
и второй датчики тока, входы которых соединены с выходами первого и второго интеграторов,выход первого датчика тока подключен к управляющему входу синхронизатора работы модели и к первому адресному входу блока микропрограммного управления, .второй адресньй вход которого соединен с выходом второго датчика тока.
3.Устройство по П.1, отличающееся тем, что, с целью повышения точности моделирования,
в него дополнительно введен регулируемый источник напряжения, выход коTOfioro соединен с третьими входами третьего и четвертого сумматоров.
Таблица 1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| Способ обнаружения и локализации отказов вентильного электродвигателя | 1988 |
|
SU1640798A1 |
| Способ импульсного управления в режиме торможения вентильным электродвигателем | 1986 |
|
SU1642572A1 |
| СПОСОБ И СИСТЕМА РЕГУЛИРОВАНИЯ РЕЖИМОВ РАБОТЫ ДВУХТОПЛИВНОГО ДВС | 2017 |
|
RU2689658C1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1464263A1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1464262A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Устройство для моделирования м-фазного вентильного преобразователя | 1974 |
|
SU524200A1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1646025A1 |
| Способ импульсного управления вентильным электродвигателем | 1986 |
|
SU1642573A2 |
Изобретение относится к аналоговой вычислительной технике и предназначено для моделирования электромагнитных и электромеханических процессов в вентильном электродвигателе с обмоткой якоря, секции которой соединены в звезду (лучевая обмотка). Цель изобретения - повышение точности моделирования. Для достижения поставленной цели в устройство введены два цифроаналоговых преобразователя, регистр, блок микропрограммного управления, синхронизатор работы модели, третий и четвертый сумматоры. Для повышения точности моделирования в устройство также введены первый и второй датчики тока и регулируемый источник напряжения. Устройство обеспечивает автоматическое изменение алгоритма при моделировании коммутационных процессов как на границе межкоммутационных интервалов, так и внутри их. 2 з.п. ф-лы, 20 ил.
V,
з
л
i. 0 .(О
ДТ,вяда Д
0
ПВ
1 -1
ДВ
дт,(д-|-) дт,(е-|-)
|) ДВ
о -1
1) дт,(в«-|-)
-1
о Ц-) ДВ
-1-1
Т ДВ
-1-1
оо
Т ДТ.вида Т,
-1о
О
о о
-1
Д ДТ, вида Д
о
О Д ДВ
- 1 -1
ДВ, 9 - -J- ДВ
-1
о
|г о + 1
дв,в-t|и
ДВ о
о
-1
ДВ, е- -2Примечание. .
Продолжение табл.1
Аг
- о,5«м«.+
4,0
обр.обр.
Ь
h
О О .f.7
ьНАГ
г
САЗ -ч
h
обр.
Ai
f/)3
м
Д}
обр.
А
Й1
0. О
Ai
Л1 лг
i о (-)
обр.
А1
лг
i,. О (ol N- )
обр.
Лг
А}
i, О (if)
г -
обр.
обр. f.
Л1
i, 0/«/ 0,5,„, -е()
обр,
,г
0
h -.г
о
V., fм
i, « О ()
О
Al
41
i-l О (о ) О обр.
,
яг
flt А р
ДЗ
oii.
/.i
О обр.
ь
fA
г
ЧАЧ
fAl
„
обр.
А ДВ двигательный режим; ПВ - режим противовключекия; ДТ - режим динамического торможения; ,ДТ, вида Т и ДТ вида Д - режимы динамического торможения, организуемые включением одного из 2-х ключей, обеспечивающих перевод в режим ПВ . (для алгоритма вида Т(Д) - включенключ, управляющий сигнал .которого в ДВ режиме опережает (отстает) в фазовом отношении/от сигнала управления другим ключом; О - режим отключения, при котором ток в отключенных секциях обмотки якоря спадает по цепи, содержащей встречно включенный источник питания; О - режим отключения, при котором в. двухполупериодном преобразователе частоты.из двух ключей, которые должны быть включены по сигналу датчика положения ротора в ДВ режиме, включен один; св - угол опережения включения; пр - прямое включение диода; обр - обратное включение диода; О- отсутствие диода в контуре; ii(0) - значение тока j-ro элек ромагнитногоконтура в начале ;такта коммутации; ij ij+ii- суммарный ток.
Т а б л и ц а 2.
Фиг. 1
Кжгутуб фиг.I
К жгуту А Фиг.1
HufSumUA )(/, Г
Фиг. 2
Фие.З
5 55
11
3s
i
.
55
t
ti III
ч55
ннвге gcmpaOcmffit npaS eiitis (Фиг. 6)
Фаг. 5
«5
Фиг. 6
:v
Сбтхода SJUJKO f фаг, 7
i5
,1
S5
bv NtV
(фиг. И)
Фаг. 9
§2 te
IP III (Выхода 65 1 47 синхроназатора 56 (Фиг,(35 iSbixodo6 , 212 блока 55 микропрограммного управления (фиг. 7,3) вшода Л f $лока7 (фиг. (Вшода JJ 1 44 fyo/fo д ((риг.1)
J
1одк/1Ю(/ены
анамгично свотВетстбующип BtLdodati
5лока 26
(Фаг. 11)
Фиг. 12
Фиг. 13 I f/a ffxod J4 - интегратора к I (Фаг.1) 45 Г На 8ход /J интегратора 11 I
19 )1 ,
Qoxg
f§.. 1 -l|
.1
|f|
€1 t
Si
Датчик положения ротора
f f t
ШдпраВляющив 8хоШ ключей .
Фиг. 15 6с Фиг. 16
VTnV
Ш Фаг. 17
| Авторское свидетельство СССР | |||
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1980 |
|
SU1035618A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
