(Л
с
4
to
со о а
00
фиг.1
7
7
ральное устройство управлентг я 1 , соединенное своими входами с дагчгжа- мн 2 агрометерс танции. Другими своими входами центральное устройство управления 1 через аналоговые элек- тропневмопреобразователи 3 и лшиш связи 4 соединена с входами местных устройств; контроля к управле- .ния 5. Второй вход последних соедк йен Q полевым датчиком 6, а выходы с исполнительнБМи механизмами 8 подачи воды на поливной участок от подводящего трубопровода 9 и через соответствующий аналоговый пневмс- эаектропреобразователь 3 ц центральным устройством управления 1.
Вода для полива передается по тру- бопроводу 9 через исполнительные механизмы 10 поливных блоков, выходы центрального устройства управления 1 соединены через электро- пневмопреобразователи дискретного действия 1 с исполнительными механизмами. 10 блоков полива и местными устройствами контроля и управления 5 Местное устройство контроля и управления 5 включает в себя пороговое устройство, подключенной своим входом к полевому датчику 6, а выходом - к исполнительному механизму 8 подачи воды на поливной участок I .п, ф-лы, 3 ил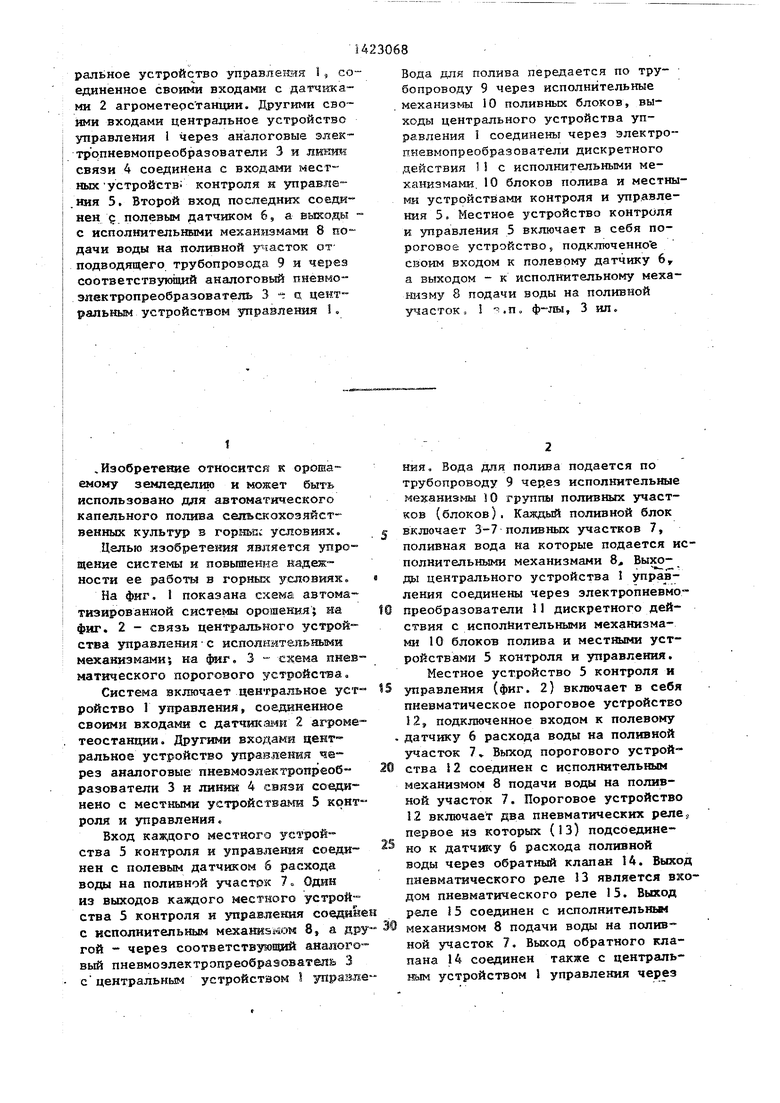

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления и контроля автоматизированной системой полива | 1985 |
|
SU1319803A1 |
| Автоматизированная оросительная система | 1984 |
|
SU1217312A1 |
| Устройство управления подачей удобрений в закрытую систему орошения | 1985 |
|
SU1297765A1 |
| Способ автоматизированного управления напорной оросительной системой | 1989 |
|
SU1706474A1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| Способ автоматического управления распределением воды между поливными участками и устройство для его осуществления | 1983 |
|
SU1209111A1 |
| Устройство для автоматизации управления исполнительными механизмами при бороздковом поливе | 1983 |
|
SU1165311A1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ | 2011 |
|
RU2476067C2 |
| Система капельного орошения с дистанционным управлением | 2023 |
|
RU2822771C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КАПЕЛЬНЫМ ПОЛИВОМ В ТЕПЛИЦЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2216930C2 |
Изобретение относится к механизации и автоматизации орошения сельскохозяйственных культур и может быть использовано для автоматизированного капельного полива в горных условиях. Целью изобретения является упрощение системы орошения и по- вьшение надежности ее работы в горных условиях. Система включает цент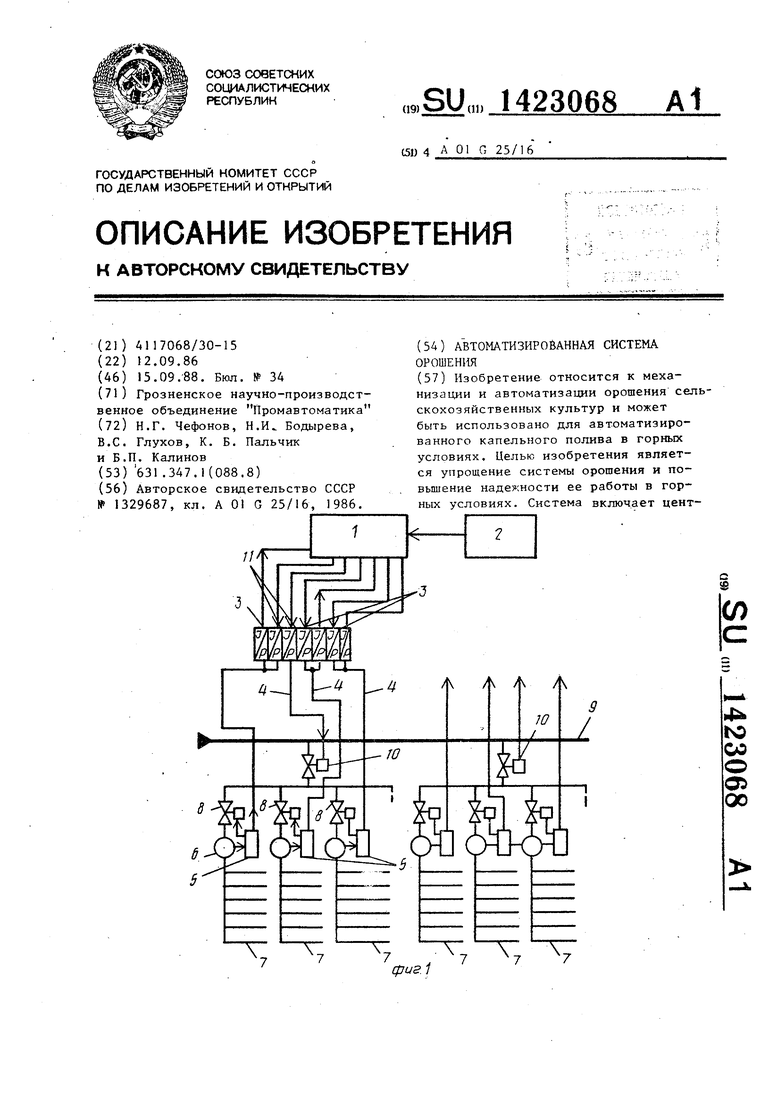
t
,Изобретение относится к орошаемому земледелию и может бьп использовано для автоматического капельного полива сельскокозяйст- венных культур s условиях.
Целью изобретения является упро щение системы и повышение надежности ее работы в горных условйяк.
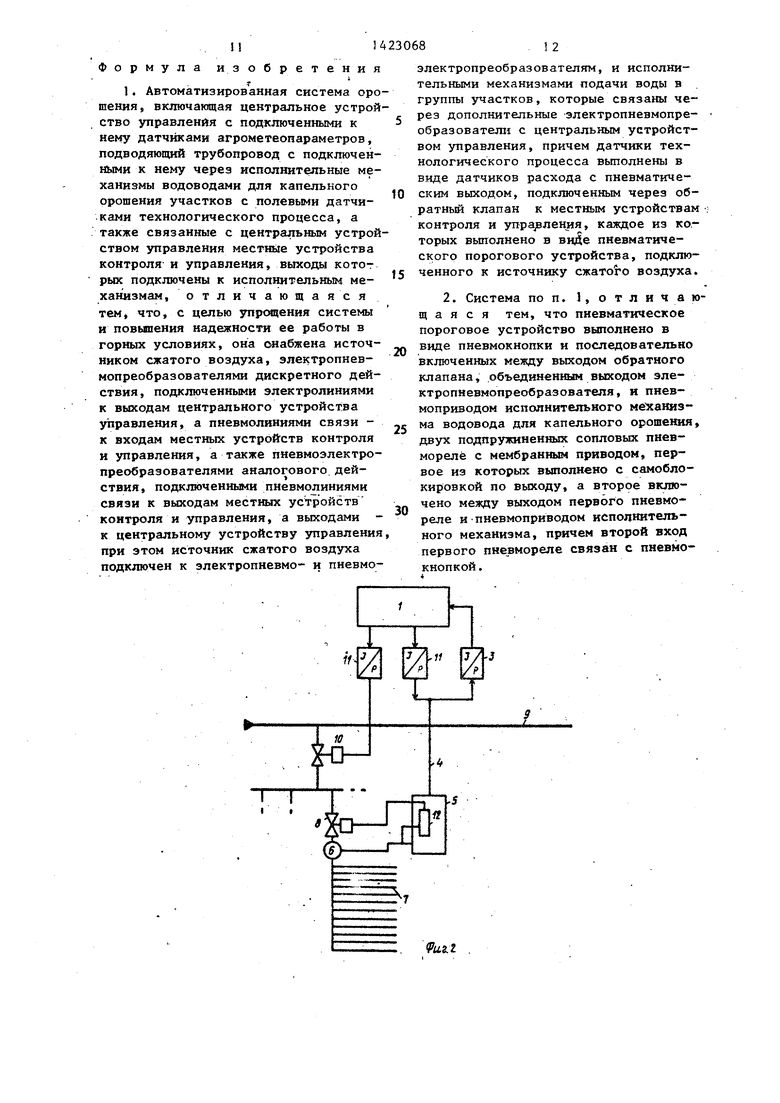
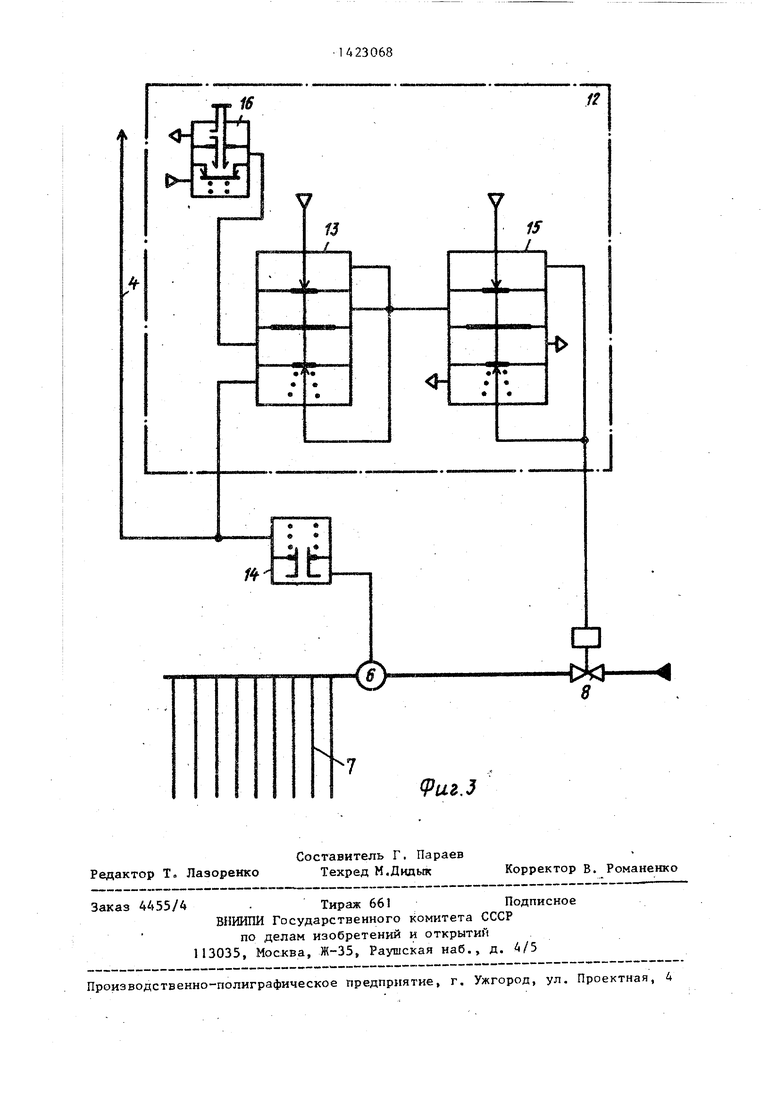
На фиг, I показана схема автома тизированной системы орошения; на фиг. 2 - связь централь ног- о устройства управленияс исполннтепьньми механизмами; на фиг, 3 - схема пневматического порогового устройства,
Система включает центральное уст- ройство Г управления, соединенное своими входами с датчиками 2 агроме- теостанции. Другими входами центральное устройство управления через аналоговые пневмоэлектропреоб- разоватепи 3 и линии 4 CBSJSH соединено с местными ycтpoйcтвa ra 5 контроля и управления.
Вход каж;цого местного устройства 5 контроля и управления соедк- нен с полевым датчиком б расхода воды на поливной участок 7. Один из выходов каждого местного устройства 5 контроля и управления соедине с исполнительным механизмов 8, а дру гой - через соответствузопдай аналоговый пневмоэлектропреобраэователь 3 с центральньм устройством I упраг лення. Вода для полива подается по трубопроводу 9 чер.ез исполнительные механизмы 10 группы полившлх участков (блоков). Каждый поливной блок включает 3-7 поливных участков 7, поливная вода на которые подается иполнительными механизмами 8, Выходы центрального устройства 1 управления соединены через злектропневмо преобразователи 11 дискретного действия с исполнительными механизмами 10 блоков полива и местными устройствами 5 контроля и управления, Местное устройство 5 контроля и управления (фиг. 2) BKjrB04aeT в себя пневматическое пороговое устройство 12, подключенное входом к полевому датчику 6 расхода воды на поливной участок 7 Выход порогового устройства I2 соединен с исполнительным механизмом 8 подачи воды на поливной участок 7. Пороговое устройство 12 включает два пневматических реле первое из которых (13) подсоединено к датчику 6 расхода поливной воды через обратный клапан 14. Выхо пневматического реле 3 является вхдом пневматического реле 15. Выход репе 15 соединен с исполнительньи механизмом 8 подачи воды на поливной участок 7. Выход обратного клапана 14 соединен также с центральным устройством 5 управления через
линию 4 связи и пневмоэлектропре- образОватели 3 и П. В третью, начиная сверху, (глухую) камеру реле 3 заводится сигнал от пневмокнопки 16 В качестве центрального устройства управления может быть использован микропроцессорный комплекс Климат- микро. В качестве датчиков 2 агро- метеостанции использованы осадкомер два датчика температуры (термометры сопротивления с преобразователями) и датчик испарения с водной поверхности, изготовленньй на базе промышленного датчика ГГИ-ЗООО. Комплекс Климат-микро может управлять орошением, например, по критерию дефицита а влагозапасов, которые рассчитываются следующим образом. Каждый сорт растений имеет свои оптимальные только для него, условия произрастания, которые зависят от состава почвы, влажности, наличия удобрений и т.п. Влажность почвы можно характеризовать количеством влаги на 1 га или на блоке. Расчет количества влаги производится термостатно-весовым методом, при котором берут пробы почвы до определенной глубины через каждый 15-20 см, потом рассчитывают количество воды (т Hct 1 га, 1 блок. В данном случае такой расчет производят при запуске системы управления (определяют начальные условия).
Цель управления состоит в поддержании оптимального количества влаги в течение всего вегетационного периода. Для этого производят расчет потребляемой за сутки влаги (растение, испарение с поверхности и т.д.). и внесенной (осадки). Дефицит влагозапасов блока - это количество воды, которое необходимо дополнить блоку до оптимального. После подсчета баланса потребленного и внесенного количества разность прибавляется или отнимается от имеющегося (текущего). Если появился дефицит, необходимо исключить его с помощью полива. Длительность полива рассчитывается делеи;1е дефицита на суммарный расход капельниц - водовыпусков. Если количество блоков более 1, то дополнительно проводится ранжировка дефицитов блоков и решается задача обеспечения оптимального полива при ограничениях на производительность насосной станции, ее простои, сорт насаждений и т.п. Все эти расчеты
реализует центральное мнкропроцессорное устройство 1, которое фор- мирует управляющие воздействия на исполнительные механизмы 10 групп участков полива (блоков).
В качестве пневмоэлектропреобразо- вателей 3 аналогового действия могут быть использованы преобразователи типа ПЭ-55М, линии 4 связи - полиэтиленовые трубки (6-8)-1 мм.
В качестве местных устройств 5 контроля и управления использованы пневт матические устройства Склон.
В предлагаемой системе преобразователи 3 - пневмоэлектропреобразователи аналоговые типа давление - ток (т.е. Р(1) 0,2-1,0 кГс/см - 0-5 мА, ПЭ55М). Преобразователи 11- электропневмопреобразователи дискретного действия (П1ПР.5). На
фиг.1 и 2 преобразователи 3 и 11 обозначены одним и тем же символом, но характер преобразования обозначен входными и выходными стрелками. Местные устройства 5 контроля и
управления в автоматизированной системе вьтолняют следующие функции - контроль расхода поливной воды, выработка и запоминание управляющего воздействия на закрытие исполнительного механизма 8 полива, от сигнала полевого датчика 6 расхода воды, прием, обработка и выработка управляющего сигнала на закрытие исполнительного механизма 8 от
центрального микропроцессорного устройства 1 управления, защита полевого датчика 6 расхода воды от уп- равляю1%его сигнала центрального микропроцессорного устройства 1.
,.
Кроме элементов 16 (пневмокнопка),
.13 и 15 (пневмореле ШРЗ) устройство включает в себя источник сжатого воз- ,духа с редуктором и фильтром, малогабаритные манометры на входе и выходе для контроля давлений и работоспособности, обратный клапан 14 монтажную плату для крепления эле- ментов, коммутации входных и выходных линий и футляр, с помощью которого происходит защита конструкции от влияния внешних воздействий, а также крепление к исполнительному механизму.
В качестве полевых датчикоз 6 расхода воды использовань комплекты диафрагма -дифманометр спневмати-- ческим выходом (ДКН с 13 ДДПСТ2), В качестве пол язньгх участков 7 использовано оборудование капельного орошения виноградника. В качестве исполнительных механизмов 8 н 10 использованы серийно выпускаемые пневмоприводы дискретного действия, Трубопровод 9 - магистрапьньш трубопровода асбоцементный или полиэ-п-ше- новый диаметром 200-300 f-fM. Б качестве элак тропневмопреобразователей 3 i дискретного действия исгюльзозавьЕ преобразователи В качестве пневмореле 13 и 15 исполпьзованы серийно выпускаег ые 1ПРЗ, В качестве обратного клапана использован клапан ПЗОК.1, в качестве пневмокнопки использована кнопка ПЗКН.З,
Обратный клапан 14 рассчитан на срабатывание при перепаде давлений в 0,05 кгс/см . При этом максимальный сигнал управления от центрального микропроцессорного устройства составляет 1,4-0,14 кгс/см 5 а максимальный сигнал от полевого датчтдка 6 расхода поливной воды не более 1,1 кгс/см.
Автоматизированная система ороше- ния работает следутовдс/; образом,
В нормальном режиме функционирования полив осуш,ествляется поблочно выработкой заправляющих сигналов центральным устройством 1 - травле- НИН, Исходной информацией дли определения сроков и длительности поливов является информация, ci-тмаемая ,от датчиков агрометеостанцик Набор датчиков агрометеостанции завк- сит от выбранного метода определения сроков и длительности поливов. В данном случае использован известны метод измерения испаряемости с вод НИИ поверхности. Пря этом методе используются .датчики температуры .воздуха, испаряемости с водной поверхности, датчики влажности почвы$ осадкомер.
Эта информация вводится через элементы связи с объектом в центральное устройство управления, которое рабатьшает информацию с делью определения сроков я пред о Jгжитeль нести поливов по дефицитам влагоэапасов на каждом блоке. При.необходимости
0
0
5
0
5
поддержания оптимальных влагозапасов ка.ждого блока, выбирается номер блока. наиболее нуждающегося в поливе, и вырабатьшается управлякнцее воздействие на исполнительный механизм 10 конкретного блока. Так как исполнительные механиз Ф1 10 блоков пневма- тегческого действия, а централ1 ное, устройство управления вьфабатывает ут :равляющий сигнал электр «ескиь-, то для согласования видов энергии исполь3ован электропневмопреобразова- тель 11 дискретного действия.
В нормальном режиме функционирования исполнительные механизмы 8 подачи воды на поливные участки 7 от хрыты, что позволяет поливать одновременно все полхшные участки 7 од-- кого блока.
Если в качестве водовыпусков использованы капельницы (для горных условий наиболее приемлемый вид орошения капельное), а конструкция капельницы обладает свойством поддержания постоянного расхода при изменении давления (естественно, если ОКИ годные)5 то расход воды на блок величина постоянная (2-3%), При вклю- ченик полива расход достигает 100% своего паспортного и несколько превышает его. за счет неодновременности срабатывания капельниц.
Такие переходные режимь учтены подсоединением к полевому датчику 6. расхода поливной воды линий связи большой емкости с центральным микропроцессорным устройством, которые сглаживают пики давления воздуха. Если давление воздуха 1,0 кгс/сн превышает 30-35 с,срабатывает пороговое устройство 12 и выключает полив . Если это не происходит центральное микропроцессорное устройство, анализируя ситуацию, само подает в линию связи командный сигнал 1,4-0914 кгс/см. Если после снятия этого командного сигнала рас ход воды на участок 7 не упадет до О формируется управляющий сигнал на закрытие исполнительного механизма 10 соответствующего блока для аварийного окончания полива. Вода для полива доставляется на орошаемые участки по магистральному трубопроводу 9, Контроль за поступле- (расходом) воды на каждый из орошаемых .участков блока осуществляется датчиками 6 расхода воды, смонтированными на трубопроводах подачи воды на участки 7 блока. Сигналы, снимаемые с датчиков 6 расхода воды, подаются через обратные клапаны 14, соответствующие линии 4 связи и аналоговые пневмоэлектропреобразователи 3 в центральное устройство управления. Датчики 6 расхода воды на поливные участки 7 выбраны пневмати-- ческого действия (т.е. вьфабатьгоае- мый ими выходной сигнал пропорционален расходу воду и равен 0,2-1,0 10 кПа). Дальше сигналы передаются по пневмотрубкам диаметром 6-8 мм. При вводе в центральное устройство 1 управления пневматические сигналы преобразуются пневмоэлектропреобразо вателями 3 -аналогового действия, преобразующими пневматические сигналы ,0,2-1, кПа в электрические токовые 0-5 мА, которые и заводятся- в центральное устройство 1 управления.
Центральное устройство 1 управления сравнивает текущее значение рас- хода поливной воды на каждом из участков 7 блока с нормами технологического регламента. Если отклонени нет, полив продолжается до окончания расчетного времени полива блока, после чего центральное устройство 1 управления вырабатывает сигнал окончания полива, т.е. снимается командный сигнал с исполнительного механизма 10 полива, блока. Полив выбранного блока прекращается. При необходимости полива следующего блока центральное устройство 1 управления вырабатывает командный сигнал на очкрытие исполнительного механизма Ш следующего блока. Если такой необходимости нет, полив блоков не происходит.
При поливе орошаемых участков, расположенных на горных склонах, важен строгий контроль параметров, ха- рактеризующих режим полива. В предлагаемой системе таким параметром выбран расход воды на полив участка 7. Контроль этого параметра ведется .одновременно двумя устройствами {эту функцию реализует центральное устройство 1 управления в режиме цент-, рализованного контроля всех орошаемых участков 7J. Функции локалы -jco контроля реализуют местные устройства 5 контроля и управления. Реакция этих устройств на отклонение расхода поливной воды на орошаемый участок 7 различная. При уменьшении расхода .
0
5 О
5
5
0
0
поливной воды центральное устройство управления идентифицирует это событие с забитием (засорением) капель- ниц-водовыпусков, или прекращение полива по инциативе персонала, что сразу же документируется на устройстве печати, но никаких управляющих воздействий при этом центральное устройство управления не вырабатывает. При увеличении расхода поливной воды на орошаемый участок. 7 центральное устройство управления вырабатывает командный сигнал на закрытие исполнительного механизма 10, т.е. прекращение полива блока. Реакция центрального устройства 1 управления поступает через 3-4 мин после появления события (изменения расхода поливной воды на участок 7). Такая задержка происходит за счет инерционности пневматических линий ев язи.
Для поБьппения скорости реакции на изменение события (расхода поливной воды на участок 7) использованы местные устройства 5 контроля и управления. Свои функции местное устройство 5 контроля и управления реализует следующим образом. В нормальном состоянии исполнительный механизм 8 открыт, что позволяет производить полив участка. В случае отклонений расхода поливной воды в большую сторону, что может произойти при аварии поливной сети (срыв капельницы водоспуска, обрыв noj nBHO- го трубопровода), датчик 6 расхода поливной воды сразу отмечает .та. Если при нормальном расходе на выходе датчика расхода поливной воды был сигнал (0,7-0,8) Ю кПа, то при увеличении расхода выходной сигнал увеличится до (0,9-0,96) 10 кПа, или станет максимальньм I 10 кПа. Это изменение (0,2-1,0 кгс/см ) подается через обратньгй клапан 14 в нижнюю камеру пневмореле 3 (там, где расположена пружина подпора), За счет пружины мембранный блок в это время находится в поднятом состоянии и закрывает верхнее сопло (куда сверху подается давление питания). При повышении давления в нижней (четвертой) камере воздух поступает во вторую и первую камеры. Площадь мембраны второй камеры такова, что позволяет передвинуть мембранный
блок вниз, преодолевая сдерживающее усилие пружины четвертой камеры. При таком передвижении мембранного блока вниз освобождается (открьшает ся) сопло верхней камеры и закрывается сопло четвертой камеры. Давление питания через сопло первой камеры подается во вторую камеру к дополняет усилие по передвижке мем- бранного блока вниз, В этом положении реле 13 запоминает свое состояние, т.е. при последующих изменениях давления полевого датчика б пневмо реле не изменит своего состояния, так как перекрыто сопло четвертой камеры .
В исходном состоянии мембранный блок реле 15 находится также в поднятом состоянии.При повьшении давления от пневмореле 13 повышается давление во второй камере пневмореле 15. Мембранный блок пневмореле перемещается вниз, закрывая сброс воздуха в атмосферу через сопло четвертой камеры и открывая сопло подачи сжатого воздуха на исполнительный механизм 8.
Полив аварийного участка 7 прекращается. Пневмореле 5 необходимо для развязки цепей контроля и управления , а также для улучшения релейной характеристики устройства.
Расход ВОДЫ на з асток 7 становится равным нулю, что вызывает уменьшение выходного сигнала датчика расхода 6 поливной воды до О, кПа, но пороговое устройство 12 запоминает прдыдущее (аварийное) состоя ше з астка и не открывает исполнительный меха- низм 8 подачи поливной воды на участок 7.
Время вьфаботки упразляннцего сигнала местным устройством контроля и
управления составляет 20-30 с, что сделано для исключения ложных срабатываний датчика 6 расхода воды на участок 7. Такая задержка реализована подкхпочением литш 4 связи с центральным устройством 1 управлени к выходу обратного клапана 14. Подключение сглаживает резкие изменения давления от датч ика 6 расхо- flli воды в пускоостановочных режимах полива всего блока в целом.
Так как i-щентифицировать аварийную ситуацию на отключенном участке 7 практически невозможно, а тем
0
t 10 5
0
5
0
5
5
0
5
более устранить аварию дистанционно, то включение полива участка 7 от центрального устройства 1 не предусмотрено. Для проведения зтих операций необходимо присутствие оперативного персонала, который по месту идентифицирует сложившуюся аварийную ситуацию и дает указания об устранении ее ремонтным персоналом. По окончании ремонта необходимо деблокировать полив на участке, для использования пневмокнопки 16, при нажатии на которую давление в третьей камере пневмореле 13 по- вьЕшается до давления питания, равного давлению во второй камере. А это значит, что усилие пружины нижней камеры уже достаточно для передвижения мембранного блока пиевмореле 13 в верхнее положение, что вызывает закрытие сопла первой камеры и открытие сопла четвертой. Устройство сбрасывается в исходное состояние. Исполнительный механизм 8 открывает- ся. Линия 4 соединяет местное устройство 5 контроля и управления с центральным микропроцессорным устройством 1. Расстояние это разное для разных участков.
Имеется возможность выключения полива участка 7 от центрального устройства управления подачей командного сигнала от него через эле- ктропневмопреобразователь 1I дискретного действия, линии 4 связи, пороговые устройства 12. Такая подача давления на пороговое устройство 12 равносильна подаче давления от датчика 6 расхода воды на поливной участок 7. В этом случае обратный клапан 14 не позволяет пройти воздуху из линии связи 4 к датчику 6 расхода поливной воды.
Выключение полива орошаемых участков 7 от центрального устройства 1 управления необходимо для нормальных (неаварийных) ситуаций отключения.
При использовании предлагаемой системы понижается первоначальная стоимость и эксплуатационные расходы за счет упрощения устройств приема-передачи, снижается стоимость линий связи при замене электрока- бельиой продукции на пневмотрубки и повьшается урожайность высаженных культур за счет обеспечения оперативной локализации аварий и др.
йлаг
fj
/
/
-зй
1У
| Автоматизированная система управления бороздковым поливом | 1986 |
|
SU1329687A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
